巡逻机器人多线激光雷达的水平标定方法、系统及机器人与流程
1.本发明涉及巡逻机器人制造技术领域,更具体地,涉及一种巡逻机器人多线激光雷达的水平标定方法、系统及机器人。
背景技术:
2.近年来,随着激光导航技术的进步成熟及激光制造水平的提升,多线激光雷达导航定位方式被大量室外低速无人机器人采用。多线激光雷达通过扫描外界空间结构轮廓,并通过配准机器人运动前后时刻激光扫描来获取机器人运动参数(包括x y z方向位移和航向角、俯仰角以及滚转角等),完成机器人定位。
3.其中,在第一种情况中,雷达检测地面功能也被广泛使用,其一可以辅助机器人定位在高度方向的发散。如果能实时检测出地面,则能通过地面点云的配准,很好地约束机器人高度方向的发散。其二提出地面点,可以直接得出机器人的可行驶区域,与路沿等不可行驶地分割开来。
4.在第二种情况中,融合情况单纯的激光雷达定位导航,实际使用中往往存在鲁棒性不够高的原因。因此通常需要与其它传感器进行融合定位,比如与imu或者与轮式里程计。
5.因此,上述两种情况,都要求激光雷达是水平安装,或者计算得到安装的水平倾斜角,继而进行坐标变换补偿。现实问题是激光雷达很难靠工装装配就能保证安装足够水平,所以为了解决此问题,必须对机器人激光雷达进行水平倾斜角度计算和标定。
技术实现要素:
6.本发明的一个目的是提供一种巡逻机器人多线激光雷达的水平标定方法的新技术方案,至少能够解决现有的机器人激光雷达无法保证水平的问题。
7.本发明的第一方面,提供了一种巡逻机器人多线激光雷达的水平标定方法,包括以下步骤:
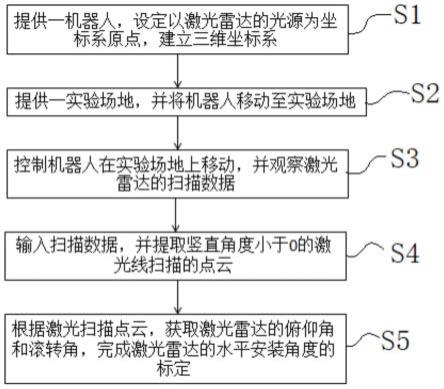
8.s1、提供一机器人,设定以激光雷达的光源为坐标系原点,建立三维坐标系;其中,三维坐标系中x轴为所述机器人前进方向,y轴为所述机器人的侧边方向,z轴为所述机器人的高度方向;
9.s2、提供一实验场地,并将所述机器人移动至所述实验场地;
10.s3、控制所述机器人在所述实验场地上移动,并观察所述激光雷达的扫描数据;
11.s4、输入扫描数据,并提取竖直角度小于0的激光线扫描的点云;
12.s5、根据所述激光扫描点云,获取所述激光雷达的俯仰角和滚转角,完成所述激光雷达的水平安装角度的标定。
13.可选地,将所述机器人移动至所述实验场地的步骤中,由所述激光雷达扫描所述实验场地的底面点。
14.可选地,控制所述机器人在所述实验场地上移动,并观察所述激光雷达的扫描数
据的步骤包括:
15.连接机器人工控机,控制所述机器人沿所述实验场地移动,并生成激光点云;
16.打开所述激光雷达的观察软件,读取所述激光雷达在所述是实验场地中的扫描数据。
17.可选地,提取竖直角度小于0的激光线扫描的点云的公式为:
18.且vert_ang小于0,,
19.其中,vert_ang为竖直角度小于0的激光线扫描的点云,p.x为三维坐标系中x轴的点云数据,p.y为三维坐标系中y轴的点云数据。
20.可选地,提取竖直角度小于0的激光线扫描的点云中,三维坐标系中x轴的点云数据的范围为-0.05《x《0.05,三维坐标系中y轴的点云数据的范围为-0.05《y《0.05。
21.可选地,根据激光扫描点云,获取所述激光雷达的俯仰角和滚转角的步骤中,根据点云数据的二维坐标(x,z),拟合成直线z=kx+b,所述俯仰角α=arctan(k)。
22.可选地,根据所述激光扫描点云,获取所述激光雷达的俯仰角和滚转角的步骤中,根据点云数据的二维坐标(y,z),拟合成直线z=ky+b,所述俯仰角β=arctan(k)。
23.本发明的第二方面,提供一种巡逻机器人多线激光雷达的水平标定系统,应用于上述实施例中所述的巡逻机器人多线激光雷达的水平标定方法,其特征在于,所述水平标定系统包括:
24.坐标模块,所述坐标模块用于以激光雷达的光源为坐标系原点,建立三维坐标系;其中,三维坐标系中x轴为所述机器人前进方向,y轴为所述机器人的侧边方向,z轴为所述机器人的高度方向;
25.移动模块,所述移动模块用于移动所述机器人;
26.扫描模块,所述扫描模块用于所述激光雷达在所述实验场地内形成扫描数据;
27.提取模块,所述提取模块用于提取竖直角度小于0的激光线扫描的点云;
28.计算模块,所述计算模块用于根据所述激光扫描点云计算俯仰角和滚转角。
29.本发明的第三方面,提供一种机器人,应用于上述实施例中所述的巡逻机器人多线激光雷达的水平标定方法进行水平标定。
30.本发明的巡逻机器人多线激光雷达的水平标定方法,以激光雷达的光源为坐标系原点,建立三维坐标系,并根据机器人在实验场地上的扫描数据,提取竖直角度小于0的激光线扫描的点云,从而计算并获取激光雷达的俯仰角和滚转角,实现激光雷达的水平安装角度的标定,水平标定精度高,标定方便,适合大规模推广使用。
31.通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
32.被结合在说明书中并构成说明书的一部分的附图示出了本发明的实施例,并且连同其说明一起用于解释本发明的原理。
33.图1是根据本发明实施例的巡逻机器人多线激光雷达的水平标定方法的流程图;
34.图2是根据本发明实施例的巡逻机器人多线激光雷达的扫描图;
35.图3是根据本发明实施例的巡逻机器人多线激光雷达的水平标定系统的原理图。
36.附图标记:
37.坐标模块10;
38.移动模块20;
39.扫描模块30;
40.提取模块40;
41.计算模块50。
具体实施方式
42.现在将参照附图来详细描述本发明的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。
43.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
44.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
45.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
46.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
47.下面结合附图具体描述根据本发明实施例的巡逻机器人多线激光雷达的水平标定方法。
48.如图1所示,根据本发明实施例的巡逻机器人多线激光雷达的水平标定方法,包括以下步骤:
49.s1、提供一机器人,设定以激光雷达的光源为坐标系原点,建立三维坐标系;其中,三维坐标系中x轴为机器人前进方向,y轴为机器人的侧边方向,z轴为机器人的高度方向;
50.s2、提供一实验场地,并将机器人移动至实验场地;
51.s3、控制机器人在实验场地上移动,并观察激光雷达的扫描数据;
52.s4、输入扫描数据,并提取竖直角度小于0的激光线扫描的点云;
53.s5、根据激光扫描点云,获取激光雷达的俯仰角和滚转角,完成激光雷达的水平安装角度的标定。
54.换言之,在本发明实施例的巡逻机器人多线激光雷达的水平标定方法中,如图1所示,首先,可以提供一台装配好的机器人,机器人内置有多线激光雷达。设定以激光雷达的光源为坐标系原点,建立三维坐标系。其中,三维坐标系中x轴为机器人前进方向,y轴为机器人的侧边方向(例如机器人左边方向),z轴为机器人的高度方向。然后,可以提供一实验场地,并将机器人移动至实验场地。实验场地的底面可以尽量保证足够水平。接着。可以启动机器人,将机器人移动到实验场地中间,控制机器人在实验场地上移动,并观察激光雷达的扫描数据,尽量保证多线激光雷达扫描尽可能多的线束扫描到底面点。然后,输入扫描数据,并提取竖直角度小于0的激光线扫描的点云。最后,根据激光扫描点云,获取激光雷达的
俯仰角和滚转角,完成激光雷达的水平安装角度的标定,实现激光雷达的水平安装角度的标定,水平标定精度高,标定方便,适合大规模推广使用。
55.当然,对于本领域技术人员来说,俯仰角和滚转角的概念是可以理解的,在本发明中不再详细赘述。
56.由此,根据本发明实施例的巡逻机器人多线激光雷达的水平标定方法,以激光雷达的光源为坐标系原点,建立三维坐标系,并根据机器人在实验场地上的扫描数据,提取竖直角度小于0的激光线扫描的点云,从而计算并获取激光雷达的俯仰角和滚转角,实现激光雷达的水平安装角度的标定,水平标定精度高,标定方便,适合大规模推广使用。
57.根据本发明的一个实施例,将机器人移动至实验场地的步骤中,由激光雷达扫描实验场地的底面点。
58.也就是说,将机器人移动至实验场地的过程中,可以通过激光雷达扫描实验场地的底面点,尽量保证多线激光雷达扫描尽可能多的线束扫描到底面点,提高巡逻机器人多线激光雷达的水平标定的精度。
59.根据本发明的一个实施例,控制机器人在实验场地上移动,并观察激光雷达的扫描数据的步骤包括:
60.连接机器人工控机,控制机器人沿实验场地移动,并生成激光点云;
61.打开激光雷达的观察软件,读取激光雷达在是实验场地中的扫描数据。
62.换句话说,控制机器人在实验场地上移动,并观察激光雷达的扫描数据的过程中,首先,可以连接机器人工控机,控制机器人沿实验场地移动,并生成激光点云。然后,可以打开激光雷达的观察软件,读取激光雷达在是实验场地中的扫描数据,方便观测读取激光雷达的扫描数据。
63.在本发明的一些具体实施方式中,提取竖直角度小于0的激光线扫描的点云的公式为:
64.且vert_ang小于0,,
65.其中,vert_ang为竖直角度小于0的激光线扫描的点云,p.x为三维坐标系中x轴的点云数据,p.y为三维坐标系中y轴的点云数据。
66.其中,提取竖直角度小于0的激光线扫描的点云中,三维坐标系中x轴的点云数据的范围为-0.05《x《0.05,三维坐标系中y轴的点云数据的范围为-0.05《y《0.05。
67.根据激光扫描点云,获取激光雷达的俯仰角和滚转角的步骤中,根据点云数据的二维坐标(x,z),拟合成直线z=kx+b,俯仰角α=arctan(k)。
68.根据激光扫描点云,获取激光雷达的俯仰角和滚转角的步骤中,根据点云数据的二维坐标(y,z),拟合成直线z=ky+b,俯仰角β=arctan(k)。
69.也就是说,提取竖直角度小于0的激光线扫描的点云的公式可以采用下式:
70.且vert_ang小于0,,
71.其中,vert_ang为竖直角度小于0的激光线扫描的点云,p.x为三维坐标系中x轴的点云数据,p.y为三维坐标系中y轴的点云数据。
72.其中,提取竖直角度小于0的激光线扫描的点云中,三维坐标系中x轴的点云数据的范围为-0.05《x《0.05,三维坐标系中y轴的点云数据的范围为-0.05《y《0.05。输入点云p_
ground,提取满足-0.05《y《0.05的数据,记为p_ground_y_0。输入点云p_ground,提取满足-0.05《x《0.05的数据,记为p_ground_x_0。
73.如图2所示,提取出来的p_ground_y_0,代表激光雷达扫描到地面的点,同时满足上述步骤中的条件点。在实验场地的地面是足够水平的情况下,那如果激光雷达安与地面是水平的话,则拟合出来的直线是水平的,即α=0,否则α≠0,即拟合出来的线是斜着往上,或者斜着往下,或者翘起来。
74.根据激光扫描点云,获取激光雷达的俯仰角和滚转角的过程中,
75.p_ground_y_0所有点云数据的二维坐标,根据点云数据的二维坐标(x,z),拟合成直线z=kx+b,俯仰角α=arctan(k)。
76.利用p_ground_x_0所有点云数据的二维坐标(y,z),根据点云数据的二维坐标(y,z),拟合成直线z=ky+b,俯仰角β=arctan(k),获取两个水平倾斜角α,β完成激光雷达水平安装角度的标定。
77.总而言之,根据本发明实施例的巡逻机器人多线激光雷达的水平标定方法,以激光雷达的光源为坐标系原点,建立三维坐标系,并根据机器人在实验场地上的扫描数据,提取竖直角度小于0的激光线扫描的点云,从而计算并获取激光雷达的俯仰角和滚转角,实现激光雷达的水平安装角度的标定,水平标定精度高,标定方便,适合大规模推广使用。
78.根据本发明的第二方面,提供一种巡逻机器人多线激光雷达的水平标定系统,应用于上述实施例中的巡逻机器人多线激光雷达的水平标定方法,水平标定系统包括坐标模块10、移动模块20、扫描模块30、提取模块40和计算模块50。其中,如图3所示,坐标模块10用于以激光雷达的光源为坐标系原点,建立三维坐标系。其中,三维坐标系中x轴为机器人前进方向,y轴为机器人的侧边方向(例如,机器人左边方向),z轴为机器人的高度方向。移动模块20用于移动机器人。扫描模块30用于激光雷达在实验场地内形成扫描数据。提取模块40用于提取竖直角度小于0的激光线扫描的点云。计算模块50用于根据激光扫描点云计算俯仰角和滚转角。
79.根据本发明实施例的巡逻机器人多线激光雷达的水平标定系统,以激光雷达的光源为坐标系原点,建立三维坐标系,并根据机器人在实验场地上的扫描数据,提取竖直角度小于0的激光线扫描的点云,从而计算并获取激光雷达的俯仰角和滚转角,实现激光雷达的水平安装角度的标定,水平标定精度高,标定方便,适合大规模推广使用。
80.根据本发明的第三方面,提供一种机器人,应用于上述实施例的巡逻机器人多线激光雷达的水平标定方法进行水平标定,实现巡逻机器人多线激光雷达的高精度、便捷式水平标定。
81.当然,对于本领域技术人员来说,机器人的其他结构及其工作原理是可以理解并且能够实现的,在本发明中不再详细赘述。
82.虽然已经通过例子对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改。本发明的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1