一种固态激光雷达点云拼接方法与流程
1.本发明涉及工程检测领域,具体涉及一种固态激光雷达点云拼接方法。
背景技术:
2.现有的大视场、长距离发射激光光束来探测目标的位置的三维激光扫描仪器有机械式三维激光扫描仪和固态激光雷达,机械式三维激光扫描仪50m内平均测距精度约1mm,测角分辨率0.0018
°
,50m处点云分辨率高达1.6mm,水平视场角360
°
,垂直视场角320
°
,测距精度高,视场角大,仪器价格昂贵,便携性差,不易于二次开发,数据量大多用于高精度测量和建筑建模等工作,而固态激光雷达测距误差普遍在2cm左右,水平和垂直视场角均不会超过180
°
,视场角小,测距精度低,数据量小,仪器价格便宜,便携性强,易于二次开发,多用于汽车自动驾驶、机器人避障。
3.机械式三维激光扫描仪测量精度高,常用于工程检测和监测,但仪器太重且价格昂贵,一般检测单位无法广泛使用,而固态激光雷达体积小、重量轻,均价便宜,且可以达到和机械式三维激光扫描仪相同的三维点云测量效果,非常适合用于三维监控量测,但因为仪器测距误差较大,且测距误差与距离呈正相关,所以测量的三维物体形状失真,导致通常适用于机械式三维激光扫描仪的基于同名标靶球和平面标靶的多站点云拼接(点云配准)效果较差甚至无法进行拼接,而点云拼接精度直接影响多仪器协同检测、监测精度。
4.现有技术中固态激光雷达点云拼接方法存在的问题是:1、多数固态激光雷达点云拼接方法均依赖于里程计、惯性测量单元、gps等其他元器件或定位方法,这些方法也多是运用于雷达载体是移动载体时对相邻帧测量点进行点云拼接,无法达到多站点云精确拼接的目的,无法运用于工程检测、监测;2、现有固态激光雷达点云拼接方法研究处于尝试阶段,现有很多固态激光雷达点云拼接方法大都是将机械式三维激光扫描仪扫描点云拼接方法应用于固态激光雷达扫描点云的拼接,该类方法在点云粗配准节段,需要待拼接的两个激光雷达的视场内点云具有几何结构特征明显的相同参照物,而固态激光雷达因测距误差较大,测量的三维物体距离仪器越远则形状失真越严重(具体表现为:机械式三维激光扫描仪和固态激光雷达扫描同一面平整矩形墙面,机械式扫描仪获得的点云坐标均在一个矩形平面上,而固态激光雷达获取的点云坐标在一个长方体范围内),导致该类依赖参照物几何形状的点云拼接方法难以发挥作用,而在点云精配准阶段使用迭代最近邻(icp)算法进行精确配准,但是icp算法拼接精度依赖于点云分辨率,对噪声非常敏感,因为固态激光雷达测距精度较低,用icp方法难以得到高精度拼接结果。
5.综上所述,急需一种固态激光雷达点云拼接方法以解决现有技术中固体激光雷达拼接精度差的问题。
技术实现要素:
6.本发明目的在于提供一种固态激光雷达点云拼接方法,以解决现有技术中固体激光雷达拼接精度差的问题,具体技术方案如下:
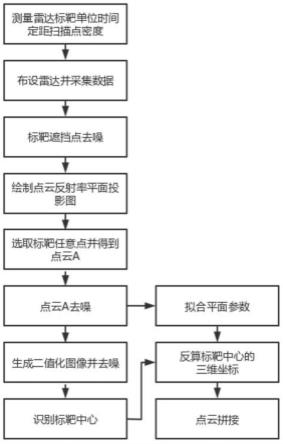
7.一种固态激光雷达点云拼接方法,包括如下步骤:
8.步骤s1:在视场内布设雷达,采集雷达扫描数据,得到视场的点云数据;
9.步骤s2:视场的点云数据去噪,得到去噪后的视场的点云数据;根据去噪后的视场的点云数据得到去噪后的标靶的点云数据;
10.步骤s3:基于去噪后的标靶的点云数据,生成标靶的二维灰度图像;
11.步骤s4:基于标靶的二维灰度图像,得到标靶的二值化图像;
12.步骤s5:对标靶的二值化图像进行识别,得到标靶的二值化图像的标靶中心点;
13.步骤s6:基于步骤s2中去噪后的标靶的点云数据拟合平面,通过拟合平面的参数以及步骤s5中得到的中心点反算得到标靶中心的三维坐标;
14.步骤s7:依据上述步骤s1-步骤s6,分别得到多个雷达的同名标靶中心的三维坐标后,进行点云拼接。
15.以上技术方案优选的,所述步骤s1中,
16.在监测现场布设多个激光雷达,多个激光雷达的共同视场内布设三个及以上同规格平面标靶,并分别采集一组扫描数据,且扫描的数据需满足c和e的关系,c的计算如式1)所示:
[0017][0018]
其中,c表示遮挡比率;t
zd
表示扫描标靶被遮挡的时间总和;t
总
表示实际扫描的总时间;e表示设定阈值,当满足c>e时,雷达重新扫描数据,否则,以该次扫描的数据作为视场的点云数据进行计算。
[0019]
以上技术方案优选的,e=[0,0.35]。
[0020]
以上技术方案优选的,所述步骤s2包括步骤s2.1和步骤s2.2;
[0021]
步骤s2.1:将视场的点云数据中遮挡标靶的点云去掉,具体如下:
[0022]
步骤s2.11:根据式2)获取标靶表面点的预计空间密度g,式2)如下:
[0023][0024]
其中,表示对标靶扫描n次获取的点的平均值;t
总
表示雷达实际扫描的总时间;b表示最远处的标靶与雷达的距离;w表示雷达的测距精度;s表示标靶的面积;α表示标靶与雷达扫描线的夹角;α=60
°
。
[0025]
步骤s2.12:计算视场的点云数据的三维空间密度,并删除视场的点云数据中三维空间密度小于eg的点,得到去噪后的视场的点云数据;
[0026]
步骤s2.2:根据去噪后的视场的点云数据得到去噪后的标靶的点云数据。
[0027]
以上技术方案优选的,在进行步骤s1之前先获取具体如下:
[0028]
第一步:在雷达1-3米处固定安置平面标靶,标靶平面垂直于雷达的激光入射方向;
[0029]
第二步:n次扫描不同时间的平面标靶,并分别记录平面标靶上的总点数目,通过式3)计算单位面积的平面标靶上单位扫描时间的平均扫描点数目
[0030][0031]
其中,i表示扫描次数,i=1,2,
…
n;x
i总
表示第i次扫描得到标靶上的总的点数目;ti表示第i次扫描的平面标靶的时间。
[0032]
以上技术方案优选的,所述步骤s2.2,具体如下:
[0033]
步骤s2.21:基于去噪后的视场的点云数据建立点云反射率平面投影图;
[0034]
步骤s2.22:选取点云反射率平面投影图中标靶的上任意点坐标(hj,vj),j表示标靶的个数;
[0035]
步骤s2.23:在去噪后的视场的点云数据中,以(hj,vj)为中心,以θr为实际角度半径选取点,得到点云a;
[0036]
步骤s2.24:对步骤s2.23的点云a进行处理,得到去噪后的标靶的点云数据。
[0037]
以上技术方案优选的,所述步骤2.23包括:
[0038]
步骤2.231:设定预选角度半径θ
r1
,以坐标(hj,vj)为中心,求取θ
r1
范围内的点的数目,根据θ
r1
范围内的点的数目判定是否重新选取θ
r1
;
[0039]
步骤2.232:计算步骤2.231中最终选取的θ
r1
范围内的点与雷达的距离的均值并根据均值计算实际角度半径θr;
[0040][0041]
其中,d表示标靶的直径。
[0042]
以上技术方案优选的,所述步骤2.24包括
[0043]
步骤2.241:将均值代入步骤s2.11的公式2)中,得到第j个标靶表面点预计空间密度gj,并依据步骤s2.12,删除点云a中三维空间密度小于gj的点,得到去噪后的点云a;
[0044]
步骤2.242:对去噪后的点云a进行迭代删除,得到去噪后的标靶的点云数据,具体如下:
[0045]
第一步,对各个标靶,删除与雷达的距离小于以及大于的点,σ表示标靶上的点与雷达距离的标准差;c表示设定倍数;
[0046]
第二步,若点云a中剩余的点与雷达的距离的标准差大于设定值ε,则返回第一步,否则进入下一步;
[0047]
第三步,将第二步中剩余的点输出为去噪后的标靶的点云数据。
[0048]
以上技术方案优选的,所述设定值ε的计算如式5)所示,
[0049]
ε=d
×
cos(α)+ρ;5);
[0050]
其中,ρ表示雷达的测距误差。
[0051]
以上技术方案优选的,所述步骤s4具体包括以下步骤:
[0052]
步骤s4.1:对生成的标靶的二维灰度图像进行中值滤波去噪;
[0053]
步骤s4.2:求取二维灰度图像的二值化阈值并得到二值化图像;
[0054]
步骤s4.3:基于二值化图像,得到联通数为二的两个联通区域的重心的连线,并获取该连线与水平方向的夹角θ;
[0055]
步骤s4.4:对步骤s4.2中的二值化图像采用开运算和闭运算进行去噪,得到去噪后的二值化图像;
[0056]
开运算和闭运算需满足如下要求:
[0057]
要求一:开运算和闭运算的卷积核的基础形状为“x”型;
[0058]
要求二:当步骤s4.3中获取的θ不为0时,以卷积核的核心位置为旋转中心,以θ为旋转角度,逆时针旋转。
[0059]
应用本发明的技术方案,具有以下有益效果:
[0060]
(1)本发明的雷达点云拼接方法解决了现有基于机械式三维激光扫描仪的点云拼接方法不适用于固态激光雷达点云拼接的情况,还解决了现有基于长距离固态激光雷达的工程检测、监测或者其他远距离测量项目时无法点云拼接和点云拼接精度太低的情况,并且避免了现有固态激光雷达不依靠里程计、惯性测量单元、gps等其他元器件时点云拼接精度过低而无法进行工程检测、监测的情况。
[0061]
(2)本发明的方法有车辆和行人遮挡扫描时,若满足c>e时,雷达重新扫描数据,否则,以该次扫描的数据作为视场的点云数据进行后续计算,以保证数据的准确性以及拼接的精度。
[0062]
(3)本发明的方法数据处理部分原理简单,无需机器学习和数据训练,对电脑配置要求低,易于实现,仅需要很少的人工操作(即人手选取标靶任意点)即可精确获取标靶的任意点坐标。
[0063]
(4)因固态激光雷达测距精度低,标靶三维点云转换为二维图像后进行角点识别时,二维图像失真且噪点较多,造成无法直接用现有角点识别方法进行识别,本方法中通过步骤s4.3和步骤s4.4进行处理后得到的二值化图像结合现有角点检测识别方法,成功实现该类标靶中心坐标识别功能,且标靶的位姿不同对该识别方法无影响。
[0064]
(5)当第一次安装完仪器(即雷达设备)和标靶后,作业人员可以远程重复进行点云的采集和拼接,测量现场无需人员二次配合和调试仪器。
[0065]
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
[0066]
构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
[0067]
在附图中:
[0068]
图1本实施例的固态激光雷达点云拼接方法的流程示意图;
[0069]
图2是本实施例进行步骤s2.12前和进行步骤s2.12后的对比示意图;
[0070]
图3是本实施例的步骤s2.22选取标靶中心坐标时人机交互的示意图;
[0071]
图4是本实施例中的二值化图像示意图;
[0072]
图5是本实施例中二值化图像中联通区域的重心连线与水平方向的夹角示意图;
[0073]
图6是本实施例步骤s4.4中的卷积核旋转前和旋转后的示意图;
[0074]
图7是本实施例步骤s2、步骤s3以及步骤s4获取的标靶点云与生成的二值化图像对比图示。
具体实施方式
[0075]
以下结合附图对本发明的实施例进行详细说明,但是本发明可以根据权利要求限定和覆盖的多种不同方式实施。
[0076]
实施例:
[0077]
一种固态激光雷达点云拼接方法,本实施例的固态激光雷达采用大疆livox mid-40,在正式监测前(即进行步骤s1之前),对各个雷达进行标靶测点密度实验,即先获取以便于后续测量中计算标靶表面的预计空间密度,的计算如下:
[0078]
第一步:在雷达1-3米(优选1米)处固定安置边长为50cm正方形纯白色平面标靶,标靶平面近似垂直于激光入射方向,现实中无法保证完全垂直,近似垂直即可;
[0079]
第二步:多次扫描不同时间(例如10-30秒,本实施例优选分别扫描10s、20s、30s)的平面标靶,并分别记录平面标靶上的总点数目x
i总
,通过式3)计算单位面积的平面标靶上单位扫描时间的平均扫描点数目(即在距离雷达1m处,每平方米大小的标靶扫描1s得到的点数目):
[0080][0081]
其中,i表示扫描次数,i=1,2,
…
n;x
i总
表示第i次扫描得到的标靶上的总的点数目;ti表示第i次扫描的平面标靶的时间;α表示标靶与雷达扫描线的夹角,此处标靶与雷达扫描线的夹角一般约等于90
°
。
[0082]
本实施例的固态激光雷达点云拼接方法具体包括如下步骤:
[0083]
步骤s1:在视场内布设雷达,采集雷达扫描数据,得到视场的点云数据,具体如下:
[0084]
在监测现场布设多个激光雷达(例如2-5个),多个激光雷达的共同视场内布设三个及以上同规格平面标靶,并分别采集一组扫描数据(采集时间例如30
±
3秒),布设的雷达优选满足如下条件:
[0085]
条件一:标靶距离雷达的距离在5-35m范围内(距离超过35米后激光雷达扫描精度很低,不适用于该点云拼接方法,距离太近的话,近处的标靶容易遮挡远处的标靶,5-35m能保证数据的精度);
[0086]
条件二:视场内布设的所有标靶的靶心不共线(共线会导致无法求取坐标转换参数);
[0087]
条件三:标靶平面尽量垂直于雷达的扫描射线;
[0088]
条件四:量取最远处的标靶与雷达的距离,该距离记为b(b
±
0.5m),例如本实施例的两个雷达的共同视场内共布设三个标靶,优选三个标靶距离雷达分别为25m、30m、35m,即b=35m;
[0089]
本实施例扫描的数据需满足c和e的关系,即根据现场扫描遮挡严重情况设定阈值,e表示设定阈值,本实施例中,优选e=[0,0.35];例如,若现场扫描理论上不会出现遮挡,则设定e=0,若现场车辆或人员来往频繁,则设定e=0.35,c表示遮挡比率,c的计算如式1)所示,式1)如下:
[0090][0091]
其中,t
zd
表示扫描标靶时被遮挡的时间总和,该时间总和可以人为的估算,也可以通过现有的传感器进行计时,或者通过类似(邹斌,刘康,王科未,基于三维激光雷达的动态障碍物检测和追踪方法[j].汽车技术,2017(08):19-25.)的内容计算运动目标遮挡总时间;t
总
表示实际扫描的总时间;
[0092]
当满足c>e时,表示遮挡严重,雷达需要重新扫描数据,当满足c≤e时,以该次扫描的数据作为视场的点云数据(即有效数据)进行后续的计算。
[0093]
步骤s2:视场的点云数据去噪,得到去噪后的视场的点云数据;根据去噪后的视场的点云数据得到去噪后的标靶的点云数据,步骤s2包括步骤s2.1和步骤s2.2:
[0094]
步骤s2.1:视场的点云数据去噪(即将视场的点云数据中遮挡标靶的点云去掉),具体如下:
[0095]
步骤s2.11:考虑到雷达测距误差和扫描线与待测标靶的几何关系,根据式2)获取标靶表面点的预计空间密度g,式2)如下:
[0096][0097]
其中,表示对标靶扫描n次获取的点的平均值,该值已在上述步骤s1之前获取得到;t
总
表示雷达实际扫描的总时间(即雷达在现场的实际扫描时间);b表示最远处的标靶与雷达的距离;w表示雷达的测距精度,该值可从雷达本身的参数中得到;s表示标靶的面积;α表示标靶与雷达扫描线的夹角,其中标靶与雷达扫描射线的夹角理论为90
°
,但实际扫描情况无法保证完全垂直,根据经验夹角α在[60
°
,90
°
]范围内,本实施例为提高鲁棒性,取极端情况60
°
作为标靶夹角,即取α=60
°
。本步骤获取的标靶表面点的预计空间密度g接近现实情况,为下一步聚类去噪提供准确的去噪密度基准,使得该方法通用性和可操作性强,去噪效果好;
[0098]
步骤s2.12:应用基于密度的聚类方法(聚类方法具体参考现有的方法),计算视场的点云数据的三维空间密度,并删除视场的点云数据中三维空间密度小于eg的点(此处e即为步骤s1中的设定阈值,e的具体取值也参照步骤s1进行选取),因为实际扫描中标靶点密度必然大于eg,而遮挡标靶的点密度必然小于eg,所以得到去噪后的视场的点云数据必然删除了遮挡标靶的点云。本实施例中,删除点云三维空间密度小于eg的点从而达到标靶点云遮挡点去噪的效果,而当选取e=0时,表示不删除点。如图2所示,图2为标靶遮挡点去噪前、后图示,标靶由虚线圆圈标出,可以看出去噪后遮挡标靶的点被去除了,标靶点云依然完整。
[0099]
步骤s2.2,根据去噪后的视场的点云数据得到去噪后的标靶的点云数据,具体如下:
[0100]
步骤s2.21:基于步骤s2.12中去噪后的视场的点云数据建立点云反射率平面投影图,如图3所示,具体是:若采集得到的点云数据不是球坐标系下的坐标,则转换到球坐标系下,根据本实施例所用雷达采集到的点云在球坐标系下的特征,进一步以“180
°‑
水平角”的数值为横坐标值,“360
°‑
竖直角”的数值为纵坐标值,“反射率”数值进行颜色映射,绘制点
云反射率平面投影图,该图片视场连续的、反射率变化明显;
[0101]
步骤s2.22:采用人机交互的方式对步骤s2.21中绘制的点云反射率平面投影图中的标靶区域粗定位,如图3所示,人机交互选取得到标靶上任意点坐标(hj,vj),j表示标靶的个数;本步骤中,人机交互可以是通过人手手动选取任意点坐标(hj,vj),需要说明的是,因固态激光雷达测距误差较大,加上平面标靶在扫描视场中占比太小且特征不明显,现有点云处理软件和分别以几何特征与颜色特征识别特征物的算法均难以准确地非交互式识别视场中距离激光雷达超过10m的标靶所在位置,并且本实施例中的人手选取的便捷性更强(人手选取虽然具有一定的误差,但并不影响技术方案的实现),也无需嵌入其他算法增加设备的负担,人手选取的(hj,vj)由方框和十字标注于点云反射率平面投影图(如图3所示)上,且任意点坐标的选取工作并非次数很多的重复性工作,在固态激光雷达标靶点云识别方法无法稳定识别标靶位置时,本实施例中采用人机交互方法用时短、操作简单,为首选方案;当然,除了人机交互的选取方式之外,若后续新开发出了其他能自动选取任意点坐标的方法,也可以采用该方法自动选取(hj,vj);
[0102]
步骤s2.23:在去噪后的视场的点云数据中,以(hj,vj)为中心,以θr为角度半径范围选取点,得到点云a,具体如下:
[0103]
步骤s2.231:设定预选角度半径θ
r1
(本实施例优选θ
r1
=1
°‑3°
),以选取的(hj,vj)为中心点,在θ
r1
范围选取点,例如,以1
°
为预选角度半径在去噪后的视场的点云数据中取点,根据θ
r1
=1
°
的范围内取得的点的数目,判断是否需要重新选取θ
r1
;
[0104]
判断规则如下:
[0105]
当选取的点中,若单个标靶的点数大于k1个(例如,k1=20-40),则重新选取θ
r1
(例如θ
r1
减小0.5
°
);
[0106]
当选取的点中,若单个标靶的点数小于k2个(例如,k2=3-8),则重新选取θ
r1
(例如θ
r1
增加0.5
°
);
[0107]
选取满足上述规则的θ
r1
(即作为最终的预选角度半径);
[0108]
步骤s2.232:
[0109]
第一步,在步骤s2.231中得到了最终的预选角度半径后,即以预选角度半径θ
r1
为范围,在去噪后的视场的点云数据中取点,并计算所取的点与雷达的距离的均值
[0110]
第二步,根据均值和公式4)求取实际角度半径θr,并以θr为范围取点,得到点云a,式4)如下:
[0111][0112]
其中,d表示标靶的直径。
[0113]
步骤s2.24:对步骤s2.232的点云a进行处理得到去噪后的标靶的点云数据;
[0114]
所述步骤s2.24包括步骤s2.241以及s2.242,具体如下:
[0115]
步骤s2.241:将步骤s2.232得到的均值代入步骤s2.11的公式2)中的b,得到第j个标靶表面点预计空间密度gj,并依据步骤s2.12,删除点云a中三维空间密度小于gj的点(点云a中点的三维空间密度已在上述步骤s2.12中计算得出),得到去噪后的点云a;本步骤作用是删除标靶附近的点里点云密度大于标靶的点;
[0116]
步骤s2.242:对去噪后的点云a进行迭代删除,得到去噪后的标靶的点云数据,具
体如下:
[0117]
第一步,对各个标靶,删除与雷达的距离小于以及大于的点,σ表示标靶上的点与雷达距离的标准差;c为设定倍数,本实施例中c∈[1,3],c的取值根据实际情况选取,本实施例优选为c=3;
[0118]
第二步,若点云a中剩余的点与雷达的距离的标准差大于设定值ε,则返回第一步,否则进入下一步;
[0119]
第三步,将第二步中剩余的点输出为去噪后的标靶的点云数据。
[0120]
本步骤s2.242中经过迭代,直到剩余点与激光雷达的距离的标准差小于等于设定值ε为止,如此可以保证留下的点绝大部分为标靶上的点,所述设定值ε的计算如式5)所示,
[0121]
ε=d
×
cos(α)+ρ5);
[0122]
其中,ρ表示雷达的测距误差,此误差可根据雷达本身的参数获得;式5)中的α选取为60
°
,能有效提高鲁棒性。
[0123]
步骤s3:基于去噪后的标靶的点云数据,根据中心投影法生成二维灰度图像,此处中心投影法参考现有技术。
[0124]
步骤s4:基于标靶的二维灰度图像,得到二值化图像;所述步骤s4包括步骤s4.1至步骤s4.4,具体如下:
[0125]
步骤s4.1:对步骤s3生成的二维灰度图像进行中值滤波去噪,减少雷达误差对标靶灰度的影响,此处的滤波算法参考现有的算法;
[0126]
步骤s4.2:通过现有的迭代法自动求取步骤s4.1中去噪后的二维灰度图像的二值化阈值并得到二值化图像,如图4所示;此时获得的二值化图像在标靶中心位置的兴趣区域出现黑块的总联通区域和白块的总联通区域的面积最接近(均在总图像的40%-60%之间),例如,如图4所示,图4中的(a)和(b)分别为生成的二值图像的两个主要类型示意图:一整块白区和两小块黑区、一整块黑区和两小块白区,且黑区的总联通区域面积和白区的总联通区域面积接近,均在总图像的40%-60%之间,两图的总联通数(相同颜色的联通区域的数量)均为3,其中图4中的(a)白区联通数2,黑区联通数1,图4中的(b)正好与图4中的(a)相反;
[0127]
步骤s4.3:基于步骤s4.2中得到的二值化图像,得到联通数为二的两个联通区域的重心的连线,并获取该连线与水平方向的夹角θ,如图5所示,即求取二值化图像联通数为2且联通区域面积之和大于总图像面积的40%(因为黑区的总联通区域面积和白区的总联通区域面积接近,均在总图像的40%-60%之间,若出现联通数为2的非标靶图案的噪点,其联通面积之和必然小于总图像面积的40%)的两个联通区域的重心的连线与水平方向的角度θ;本实施例中,为方便后续计算,θ的取值规则设定为:以右侧联通区域的重心为原点,逆时针旋转重心连线至水平方向(即水平线)转过的角度;
[0128]
步骤s4.4:对步骤s4.2中的二值化图像采用开运算和闭运算进行去噪,得到去噪后的二值化图像,具体如下:
[0129]
本实施例中的开运算和闭运算参考现有的技术,但对开运算和闭运算做如下的优选,
[0130]
第一,开运算和闭运算的卷积核的基础形状为“x”型;
[0131]
第二:当步骤s4.3中获取的θ不为0时,以卷积核的核心位置(例如,5*5卷积核的核心为第3行3列)为旋转中心,以θ为旋转角度逆时针进行旋转,如图6所示;
[0132]
如图6所示,图6中的(a)为15*15“x”型卷积核旋转前的示意图,图6中的(b)为15*15“x”型卷积核旋转后的示意图,黑色线所在位置数值为1,其他地方数值为0,卷积核尺寸越大,去噪效果越好但运算量越大,根据所用cpu性能自行选择卷积核大小。
[0133]
如图7为步骤s2.242获得去噪后的标靶的点云数据通过步骤s3生成二维灰度图像,进一步通过步骤s4获得进一步去噪后的标靶二值化图像,由图可看出,通过步骤s2至步骤s4,可以较为准确得获取标靶三维点云,并将难以识别标靶中心点的点云数据通过一系列步骤转化为可以清晰识别标靶中心点的二值化图像。
[0134]
步骤s5:对步骤步骤s4.4中的去噪后的二值化图像进行识别,具体是采用了现有的高精度角点检测算法对二值化图像进行识别,得到了二值化图像的中心点(即标靶二值化图像的标靶中心点);
[0135]
步骤s6:基于步骤s2(具体是步骤s2.242)中的去噪后的标靶的点云数据拟合平面(如何拟合参考现有技术),通过拟合平面的参数以及步骤s5中得到的中心点反算得到标靶中心的三维坐标,具体参考现有技术;
[0136]
步骤s7:依据上述步骤s1-步骤s6,分别得到多个雷达的同名标靶中心的三维坐标后,通过坐标转换方法进行点云拼接。
[0137]
将本实施例中其中一个激光雷达识别的标靶中心坐标通过坐标转换后与另一个激光雷达识别的标靶中心坐标相减,得到的各个方向坐标差值和斜距差值作为点云拼接精度的体现,如表1所示:
[0138]
表1标靶坐标转换后差值(单位:mm)
[0139]
距离仪器x方向差值y方向差值z方向差值斜距差值25m处标靶-2.92.60.03.930m处标靶4.1-2.20.04.735m处标靶-1.2-0.30.01.2
[0140]
由表1可知,本文激光雷达点云拼接方法在测量距离35m内点云拼接精度优于5mm,根据几何关系推出在测量距离70m内点云拼接精度优于1cm,相对于激光雷达测距精度(
±
2cm),本方法已取得较好的拼接精度。
[0141]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1