一种基于杂波特征精确认知的连续波雷达杂波对消方法
1.本发明属于雷达技术领域,涉及雷达杂波对消,具体来说是一种基于杂波特征精确认知的连续波雷达杂波对消方法,可用于城市或郊区等复杂地形以及云雨等复杂气象探测环境下,当存在扩展静杂波或云雨等动杂波时实现杂波有效消除。
技术背景
2.随着无人飞行技术的发展,低空飞行器经常遭遇复杂地形和复杂天气,因此要求连续波侦察雷达具备城市、郊区、林地、山地等复杂地形以及强风、暴雨等复杂天气情况下有效杂波抑制能力,从而实现对低空小目标的精确探测。传统连续波雷达在杂波抑制方面主要采用mti技术,mti针对雷达所处具体环境下的杂波功率谱特性,采用不同脉冲对消级数的滤波器,在杂波谱中心处形成具有一定宽度的凹口,进而滤除杂波。但由于mti技术在应对包括地物、气象等强杂波环境下的能力还有所不足,不能较好的滤除杂波,使得在检测过程中出现较高的虚警率,影响了雷达检测性能和跟踪效果。因此,动目标检测(mtd)技术应运而生,mtd技术是由美国的林肯实验室最早研发的,其由一组部分重叠的窄带滤波器构成,由于固定杂波、低速目标、高速目标具有不同的频偏,因此可以通过mtd将运动目标与杂波区分开。研究人员发现,当雷达回波中出现运动杂波如云雨、海浪时,传统的脉冲对消滤波器性能严重下降,因此,自适应动目标显示(amti)技术被提出,其主要利用雷达杂波回波数据对杂波谱中心和谱宽进行动态的估计,进而获得mti滤波器的最优权系数,形成对准运动杂波的凹口,获得相对较优的杂波抑制效果,但amti无法实现对杂波进行精细化抑制,且存在消除杂波附近目标的现象。从前面的分析可以看出传统杂波抑制方法主要侧重于单种类型杂波的抑制,对于包含多种复杂杂波的(比如既包括地杂波、气象杂波、强发射体杂波等)抑制方法研究的比较少,同时目标杂波抑制方法本质是还是一种自适应的方法,并没有充分利用杂波的先验信息,导致杂波抑制效率比较低。
技术实现要素:
3.本发明的目的在于克服上述现有技术的不足,提出了一种基于杂波特征精确认知的连续波雷达杂波对消方法。该方法可用于城市或郊区等复杂地形以及云雨等复杂气象探测环境下,当存在扩展静杂波或云雨等动杂波时实现杂波有效消除。
4.为实现上述目的,本发明采用的技术方案为:
5.一种基于杂波特征精确认知的连续波雷达杂波对消方法,包括如下步骤:
6.步骤1:对连续波雷达接收的信号进行去调频和fft处理,获得包含地形和云雨反射的杂波以及动目标回波的信号射的杂波以及动目标回波的信号是1
×
i维的向量,n表示距离单元总数,i表示连续波雷达一个周期发射的脉冲信号总数;
7.步骤2:对进行短时傅里叶变换,获得距离-多普勒域的回波信号多普勒域的回波信号是1
×
m的向量,m表示经过短时傅里叶变换后的多普勒单元总数;
8.步骤3:利用对杂波特征进行认知,得到每个距离单元内的杂波多普勒谱dn,n=0,1,
…
n,具体步骤如下:
9.3-1)初始化第n个距离单元的杂波多普勒集合dn和幅值集合fn均为空集;
10.3-2)求解第n个距离单元的回波信号的均值:
[0011][0012]
式中,表示的第m个多普勒单元对应的数据;
[0013]
3-3)求解第n个距离单元当前回波中最大峰值q
max
,并判断是否大于门限ε,ε的取值范围为3~5,如果大于则转到步骤3-4),否则结束运行,输出杂波多普勒集合dn和幅值集合fn;
[0014]
3-4)计算当前最大峰值q
max
主瓣中,大于s
mean
[n]的值所对应的多普勒d
main
和幅值f
main
;
[0015]
3-5)将d
main
加入到杂波多普勒集合dn中,同时将f
main
加入到杂波幅值集合fn中;
[0016]
3-6)将当前最大峰值q
max
的主瓣置零,然后转到步骤3-3)继续运行;
[0017]
步骤4:构造每个距离单元内的杂波集合
[0018][0019]
式中,t表示连续波雷达发射信号周期,dn[k],k=1,
…
k表示杂波多普勒集合dn中第k个杂波对应的多普勒值,k表示杂波单元总数;
[0020]
步骤5:计算每个距离单元杂波对消权值wn,n=0,1,
…
n,具体步骤如下:
[0021]
5-1)初始化i=1和迭代步长因子μ,同时初始化第n个距离单元杂波对消权值wn为集合fn张成的k
×
1维向量;
[0022]
5-2)求解第i个发射信号脉冲杂波对消后的误差e:
[0023][0024]
式中,表示中的第i个元素;
[0025]
5-3)按照如下式子更新代步长因子μ:
[0026]
μ=μ+βe2[0027]
式中β为常数;
[0028]
5-3)按照如下式子更新对消权值wn:
[0029][0030]
式中表示杂波集合的转置;
[0031]
5-4)更新i=i+1,然后判断i是否大于i,如果大于则运行结束,否则转入步骤5-2)继续运行;
[0032]
步骤6:利用计算得到的对消权值wn,按照如下式子进行杂波对消,获得对消以后的信号的第i个元素为
[0033][0034]
本发明具有以下优点:
[0035]
1、本发明通过首先对杂波特征精确认知,然后构建杂波信号模型进行对消,因此相对于传统mti杂波抑制方法,其不仅可以对消静止杂波,同时可实现城市或郊区等复杂地形以及云雨等复杂气象探测环境下,对扩展静止杂波或动杂波进行对消,因此利用本发明的方法可有效提升连续波雷达在复杂环境下的目标探测能力。
[0036]
2、传统mti杂波抑制方法本质上是一种fir滤波的方法,存在滤波暂态响应,为了消除滤波暂态响应,会损失发射信号脉冲个数,从而导致在进行后续mtd过程中降低目标积累增益和速度分辨率。而本发明所提的杂波对消方法,不存在暂态响应,也即进行对消以后可利用雷达一个cpi期间内发射的所有脉冲个数进行mtd处理,因此相对于传统方法具有更高的目标积累增益和速度分辨率。
附图说明
[0037]
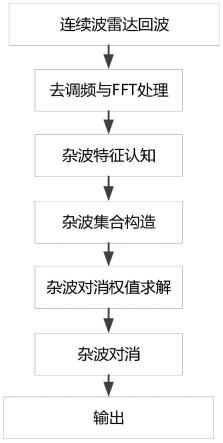
图1是本发明实施例方法的流程图。
[0038]
图2是本发明实测数据验证探测现场环境图。
[0039]
图3是对天线接收的回波信号直接进行mtd处理与利用本方法杂波对消以后再进行mtd处理的对比结果。
[0040]
图4是对天线接收的回波信号经过mti杂波抑制后进行mtd处理与利用本方法杂波对消以后再进行mtd处理的对比结果。
[0041]
图5是本方法对行人目标的跟踪效果。
具体实施方式
[0042]
参照图1,一种基于杂波特征精确认知的连续波雷达杂波对消方法,其实现步骤如下:
[0043]
步骤1:对连续波雷达接收的信号进行去调频和fft处理以后,获得包含地形和云雨反射的杂波以及动目标回波信号雨反射的杂波以及动目标回波信号是1
×
i维的向量n表示距离单元总数,i表示连续波雷达一个周期发射的脉冲信号总数;
[0044]
步骤2:对进行短时傅里叶变换,获得距离-多普勒域的回波信号多普勒域的回波信号是1
×
m的向量,m表示经过短时傅里叶变换以后多普勒单元总数;
[0045]
步骤3:利用对杂波特征进行认知,得到每个距离单元内的杂波多普勒谱dn,n=0,1,
…
n,具体步骤如下所示:
[0046]
3-1)初始化第n个距离单元的杂波多普勒集合dn和幅值集合fn均为空集,也即设定dn=[],fn=[];
[0047]
3-2)求解第n个距离单元的回波的均值为如下式子:
[0048]
[0049]
式中表示的第m个多普勒单元对应的数据;
[0050]
3-3)求解第n个距离单元当前回波中最大峰值q
max
,并判断是否大于门限ε,ε一般取3至5之间的值,如果大于则转到步骤3-4),否则运行结束;
[0051]
3-4)计算当前最大峰值q
max
主瓣中,大于s
mean
[n]的值对应的多普勒d
main
和幅值f
main
;
[0052]
3-5)将d
main
加入到杂波多普勒集合dn,也即设定dn=[dn,d
main
],同时将f
main
加入到杂波幅值集合fn,也即设定fn=[fn,f
main
].
[0053]
3-6)将当前最大峰值q
max
的主瓣置零,然后转到3-3)继续执行;
[0054]
步骤4:利用如下式子构造每个距离单元内的杂波集合
[0055][0056]
式中t表示连续波雷达发射信号周期,dn[k],k=1,
…
k表示杂波多普勒集合dn中第k个杂波对应的多普勒值,k表示杂波单元总数;
[0057]
步骤5:计算每个距离单元杂波对消权值wn,n=0,1,
…
n,具体求解步骤如下:
[0058]
5-1)初始化i=1和迭代步长因子μ,在本发明中μ初值设为0.5,同时初始化第n个距离单元杂波对消权值wn为集合fn张成的k
×
1维向量;
[0059]
5-2)求解第i个发射信号脉冲杂波对消以后误差e为如下式子:
[0060][0061]
5-3)按照如下式子更新代步长因子μ:
[0062]
μ=μ+βe2[0063]
式中β为常数,在本发明中设为0.1;
[0064]
5-3)按照如下式子更新对消权值wn:
[0065][0066]
式中表示杂波集合的转置;
[0067]
5-4)更新i=i+1,然后判断i是否大于i,如果大于则运行结束,否则转入5-2)继续运行;
[0068]
步骤6:利用求解得到的对消权值wn,按照如下式子进行杂波对消,获得对消以后的信号的第i个元素为
[0069][0070]
下面对本方法的效果进行验证:
[0071]
1)试验验证条件:
[0072]
采用一种连续波雷达进行数据采集,采集的探测环境如图2所示,可以看出回波采集数据中包含田地静止杂波和由随风摆动的树木引起的慢动目标杂波。本次试验过程采集的目标类型为行人等慢速目标,由于行人移动速度比较慢,雷达目标特征并不明显,因此需要采用精细化的杂波抑制方法,才能实现有效抑制杂波的同时不会导致目标能量的损失。
[0073]
2)实验效果
[0074]
图3为对天线接收的回波信号直接进行mtd处理与利用本方法杂波对消以后再进行mtd处理的对比结果,从图中如果不进行杂波抑制直接进行mtd处理,由静止杂波产生的副瓣较高,掩盖了微弱的目标回波,从而导致不能检测目标回波。而利用本方法的杂波对消以后,可以有效消除静止和慢动杂波及其产生的副瓣,因此可以很很明显的看由目标引起的回波。
[0075]
图4为对天线接收的回波信号经过mti杂波抑制后进行mtd处理与利用本方法杂波对消以后再进行mtd处理的对比结果。可以看出利用mti处理杂波抑制,虽然可以抑制杂波,但会在杂波附近产生较大的凹口,从而导致目标相消现象,而本方法的杂波对消,可实现对杂波进行精细化抑制,同时不损失目标回波能量,因此具有更好的杂波抑制效果
[0076]
图5为利用本方法杂波对消以后,进行行人目标检测与跟踪效果,可以看出其可实现对行人目标进行连续检测与跟踪,说明本方法可实现对杂波进行有效抑制,从而达到对慢动目标的连续检测与跟踪。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1