一种基于结构光的人体三维测量装置及测量方法
1.本发明涉及人体三维测量领域,特别是一种基于结构光的人体三维测量装置及测量方法。
背景技术:
2.随着社会信息化程度逐渐提升,人体三维测量在网购试衣、ar/vr虚拟现实增强、整形预测、虚拟社区、电影、动画制作、3d人像打印、游戏建模等方面具有广泛的潜在价值。例如:在网购中该技术可以提供消费者衣物上身效果的三维直观感受,节约选购成本;在ar/vr虚拟现实增强中该技术可以提高模型真实性,增加用户沉浸式体验;在美容整形、医美手术中该技术可精确测量患者人体或面部数据进而预测术后效果并对手术方案进行进一步调整;在虚拟社区中该技术可以提供社区用户强烈的沉浸感,提升用户双向交互的体验感,同时为社区本身提供良好的扩展性;在电影、动画制作中其可以促进三维动画制作技术提升并推动电影、动画新艺术形式发展;在3d人像打印中该技术可以提升模型细节精度并缩短3d人像打印时间;在游戏建模中该技术可以增强游戏人物真实感,促进游戏行业整体风格和趋势发展。此外人体三维测量技术在人体工学、人体形态学、工程设计等方面具有广泛应用价值。例如:在人体工学设计中,该技术可以提供消费者标准人台,在此基础上设计的人体工学产品将更贴合人体表面;在人体形态学研究中,通过该技术可获得研究对象精确三维数据,减少误差;在工程设计中;该技术可消除由测量不准确导致的产品尺寸不符合使用者情况发生。
3.如中国发明专利cn108168672b所公开的一种称重结构、人体三维扫描设备,该人体三维扫描设备包括扫描人体的可快速升降的摄像头模块、带动人体转动的人体转台,所述人体转台包括供人体站立的大转盘、与大转盘同轴设置且驱动大转盘旋转的转台组件,所述大转盘的底端均布有多个用于测量人体体重的称重结构,多个所述称重结构用于将站立在大转盘上人体的重量信息反馈至控制系统;所述称重结构包括:下壳体、供称重传感器放置的上壳体、称重传感器以及平衡组件;本发明的人体三维扫描设备结构简单,只需采用一个可上下运动的摄像头模块就能完成对人体三维模型的数据采集。
4.但是,上述的现有技术中,在测量时需要转动人体,由此加剧人体微动,降低精度。
技术实现要素:
5.本发明的目的是提供一种基于结构光的人体三维测量装置及测量方法,无需转动人体,继而避免加剧人体微动,提高精度。
6.本发明的目的通过以下技术方案来实现:
7.一种基于结构光的人体三维测量装置,包括用于人体站立测量的站立平台,站立平台上设有高度控制机构,高度控制机构上连接有骨架,骨架上安装有不少于三个测量头,多个测量头均位于站立平台的上方且周向均匀分布,多个测量头均与用于计算和控制的计算机系统连接。
8.进一步的,所述测量头数量为四个。
9.进一步的,所述测量头上设置有投影装置和采集装置。
10.进一步的,还包括用于保持人体站立稳定的支撑机构。
11.进一步的,所述支撑机构为两个设置在骨架上的握杆。
12.进一步的,所述高度控制机构包括螺纹杆、电机和光滑柱,两个光滑柱固定在站立平台上,安装板固定在两个光滑柱上,螺纹杆转动在安装板与站立平台之间,电机安装在安装板上且传动螺纹杆,骨架滑动在两个光滑柱且与螺纹杆螺纹连接。
13.进一步的,所述站立平台的上表面设有用于限定站位的限定框。
14.进一步的,所述限定框为一对脚印形状。
15.进一步的,所述限定框内设有接触电极。
16.所述的一种基于结构光的人体三维测量装置进行测量的方法,该方法包括以下步骤:
17.步骤一、使人站立在站立平台上,双手举起握紧握杆;
18.步骤二、通过高度控制机构调整多个测量头的高度;
19.步骤三、开启其中一个测量头上的投影装置和采集装置,使投影装置投影具有适当灰度的均匀光场到人体上,同步通过采集装置采集并保存图像,作为人体灰度图;然后使投影装置投射相位不断变化的正弦光条纹到人体,同步通过采集装置采集并保存四帧不同相位经人体高度调制的变形条纹图;关闭步骤三中的测量头,依次重复启动剩余测量头,直至全部测量头分别测量一次;
20.步骤四、通过计算机系统将各角度的人体表面高度分布按边缘进行数据拼接,进行点云三角化,平滑处理即可复原得到完整的光滑人体三维形貌。
21.本发明的有益效果:
22.1、采用多测量头的结构光三维测量技术,可依次快速从多角度投影采集条纹图,避免了人体旋转等机械过程,大大减少了人体微动和测量时间;
23.2、设计握杆,既使得人体有着力点,减轻人体不平衡带来的晃动,又减少了手臂产生的阴影;
24.3、高度控制模块,采用高精度步进电机驱动螺柱控制测量平台的高度,可自适应不同高度的人体测量;
25.4、将人体三维测量、体重测量、体脂测量、高度测量巧妙的融合到一起,实现基础测量一步到位。
附图说明
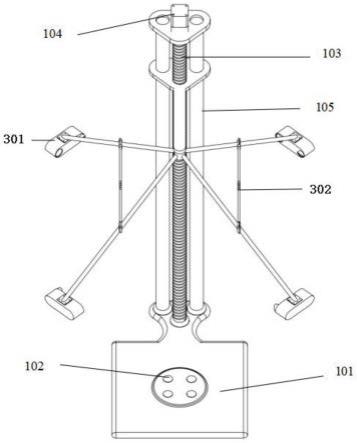
26.图1是基于结构光的人体三维测量装置的整体结构示意图;
27.图2是测量头的结构示意图;
28.图3是注塑装置的结构示意图;
29.图4是骨架的结构示意图;
30.图5是基于结构光的人体三维测量装置的测量方法的流程示意图。
31.图中:
32.站立平台101;接触电极102;螺纹杆103;电机104;光滑柱105;投影装置201;采集
装置202;测量头301;握杆302;骨架303。
具体实施方式
33.如图1-4所示:
34.一种基于结构光的人体三维测量装置,包括站立平台101、测量头301、骨架303、高度控制机构和计算机系统,所述站立平台101已标定相位高度映射关系;在测量时,使人体站立在测量的站立平台101,通过高度控制机构调节骨架303高度,继而达到对安装在骨架303上不少于三个的测量头301的高度的调节,通过多个测量头301周向均匀分布在人体上方,对位于站立平台101上的人体进行依次测量,从而达到依次快速从多角度投影采集条纹图,避免了人体旋转等机械过程,大大减少了人体微动和测量时间,测量头301测量的数据输送至与多个测量头301连接的计算机系统中进行计算,得到人体三维图像。
35.进一步的:
36.四个测量头301四等分角设置,达到从人体四个方位进行测量,形成优化的快速依次投影采集,减少测量时间。
37.如图2所示:
38.每个测量头301上的投影装置201和采集装置202,分别用于投影正弦光条纹以及采集四帧不同相位且经人体表面高度调制的变形条纹图。
39.进一步的:
40.通过支撑机构的设置,形成对人体站立稳定的保持,增加了人体着力点,减少了因肌肉疲劳产生的人体微动,减轻人体不平衡带来的晃动;
41.如图3所示:
42.在骨架303上设置两个握杆302,用于对人体的支撑,在使用时,当人进入站立平台101后,双手举起分别握紧两个握杆302,使人体具有两个着力点,减少了因肌肉疲劳产生的人体微动;又避免了阴影的产生。
43.如图1和4所示:
44.所述高度控制机构包括螺纹杆103、电机104和两个光滑柱105,在调节高度时,启动电机104传动螺纹杆103转动,形成对骨架303的螺纹传动,使骨架303在两个光滑柱105上平稳的升降移动,继而带动测量头301升降移动,达到调节测量头301高度的目的,从而适应不同高度的人体测量。
45.上述实施例为采用高精度步进电机,即电机104,驱动螺纹杆103旋转带动与螺纹杆103螺纹咬合的骨架303升降,从而达到控制由多个测量头301组成的测量平台上下运动。也可以采用气缸和液缸的伸缩对骨架303的升降控制,还可以采用齿轮齿条咬合等驱动模式实现高度调节。
46.进一步的;
47.通过在站立平台101的上表面设置限定框,对站立站立平台101上的人体进行踩位限定,能够便于对人体进行测量。
48.进一步的;
49.使限定框为一对脚印形状,进一步便于对测量人的踩位限定,能够更好的便于对人体进行测量。
50.如图1和4所示:
51.通过在限定框内设置接触电极102,用于测量人体的体脂率;使人进入站立平台后,双脚落在预定站位,双手举起握紧握杆,高度、体重测量装置测量出人体高度、体重信息。
52.从而达到将人体三维测量、体重测量、体脂测量、高度测量巧妙的融合到一起,实现基础测量一步到位。
53.如图5所示,对测量方法进行详细说明:
54.所述的一种基于结构光的人体三维测量装置进行测量的方法,该方法为:
55.步骤一、当人进入站立平台后,双脚落在预定站位,双手举起握紧握杆,高度、体重测量装置测量出人体高度、体重信息;
56.步骤二、根据所得信息,通过高度控制机构调整多个测量头高度到适当位置;
57.步骤三、开启其中一个测量头,首先投影具有适当灰度的均匀光场到人体上,同步采集并保存图像,作为人体灰度图;然后投射相位不断变化的正弦光条纹到人体,同步采集并保存四帧不同相位经人体高度调制的变形条纹图;
58.关闭上述步骤的测量头,然后将剩余的测量头依次进行以上步骤,直至全部测量头分别测量一次,此过程可在数秒内完成;
59.在实际实施上述步骤前,应在计算系统中保存有投射到参考平面上未经人体高度调制的四帧光栅条纹图;
60.然后将所述条纹图进行预处理,再通过相移算法精确计算出非连续的相位分布,再利用相位展开算法进行相位恢复获得初始相位,运用已标定的相位高度映射关系,获得各角度人体表面高度分布;
61.经人体高度调制变形条纹图可表示为:
62.i(x,y)=r(x,y)[a(x,y)+b(x,y)cosφ(x,y)]
[0063]
表面的不均匀反射率分布由r(x,y)代表,背景光强则由a(x,y)代表,而条纹的反衬度的代表则为b(x,y)/a(x,y)。φ(x,y)相位函数在式中代表了条纹的形变相位。因为里面包含三个未知的变量,所以采集三帧以上的变形条纹,即可获得相位的分布。此时获得的位相是非连续的,其被截断在[-π,π]之间。
[0064]
为了对截断的相位进行展开,在表面物体不存在反射率较高或者是高度陡变的情况下,可以沿着矩阵的任一方向进行相位展开。其中最简单的展开方法是按照行或列进行展开,一般的截断阶段是二维的,然后它可以沿着一行进行扩展,然后沿着列进行扩展行为,完整的二维相位便可以由此截断相位算法获得。
[0065]
从相位的信息得到物体的高度分布需要获知实际测量时光学系统的系统参数,根据已标定的高度映射关系可计算获得各个角度人体表面高度分布。
[0066]
步骤四、将各角度的人体表面高度分布按边缘进行数据拼接,进行点云三角化,平滑处理即可复原得到完整的光滑人体三维形貌。
[0067]
上述方法中的全部或部分流程,可以通过计算机程序控制相关的硬件来完成,所述的程序可存储于一个计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random access memory,ram)等。
[0068]
由上述本发明的实施例提供的技术方案可以看出,本发明实施例通过多个测量头多角度测量,较单测量头有效减少了测量时间,提供扶手辅助人体站立,有效克服了因久站造成的人体微动,再由计算和控制系统运用灰度变换、组合滤波窗对图像进行预处理,有效解决了因人体表面反射率不足导致的对比度低的问题,利用步进电机调节测量头高度,可适应不同的人体高度,通过解决以上问题有效提高了人体三维测量的精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1