基于多信号融合图模型风电齿轮箱故障诊断方法
1.本发明涉及故障诊断领域,特别是对风力发电机齿轮箱的故障诊断。
背景技术:
2.针对复杂环境下风力机齿轮箱运行状态监测越来越重要,尤其在山地和海上这种复杂恶劣的环境下监测风电齿轮箱故障诊断尤其重要。为了保证风力发电机齿轮的安全运行,及时避免可能的运行事故,实现对风力发电机齿轮箱工作状态的在线监测和诊断,具有重要意义。
3.大型风机齿轮箱出现故障的时候,很多情况下无法确定具体的故障特征与位置,对于传统进行实时风机齿轮箱故障检测中,单通道单维度的传感器信号无法全面表达齿轮箱的故障特征,需要多种传感器数据融合进行诊断。多种传感器在齿轮箱故障诊断方法中处理源信号的融合问题和信号处理与分析领域应用广泛。目前多传感器监测风力发电机齿轮箱同样还存在许多问题,如信号种类多,监测部位较多,缺少直观的检测手段,数据量大难以迅速做出判断等。
技术实现要素:
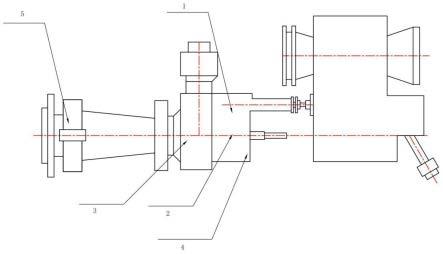
4.本发明旨在一定程度上解决上述问题,本发明的技术方案:包括声发射传感器(1)、噪声传感器(2)、振动传感器(3)、油温传感器(4)、位移传感器(5)等组成的一体化测量系统,并从多传感器信号选取特征参数及权重关系建立的数据快照图模型(6);所述振动传感器(3)安装在风力发电机齿轮箱低速轴、高速轴和齿轮箱壳体上;所述噪声传感器(2)安装在齿轮箱外壳;所述油温传感器(4)安装在齿轮箱箱体上,测量齿轮箱油池内润滑油的温度;位移传感器(5)安装在机组主轴承上;声发射传感器(1)安装在高速轴上;通过对数据快照图模型(6)进行变量提取,计算获得各阶段的主成分序列距离分布区间,判断出齿轮箱的状态实现实时监测和故障预测。
5.先通过归一化法对5种特征信号进行消除维度的差异。其次,依据马氏距离建立特征参数权重;之后提出以特征参数为节点和权重联系建立数据快照图模型。通过主成分分析对数据快照图进行变量提取;最后利用欧式距离计算获得各阶段的主成分序列距离分布区间。对多通道采集数据情况下选取五种信号特征参数为节点建立包括15个变量数据快照图模型,通过主成分分析法对变量进行主成分提取,最终获得5个解释率超过90%的主成分建立主成分序列。
6.由于不同传感器间的特征参数存在于多个维度,如单位不同以及数据数量级的不同。为了解决维度的差异,将选取的特征参数拉到同一维度构建联系分析先采用归一化法进行处理。
7.进一步的,本发明基于多种传感器与多通道信号图形识别的故障诊断方法的结合,充分发挥一体测量技术的处理信号的优势,增强了混合故障信号特征提取的准确度和精确性。
8.进一步的,本发明实现齿轮箱故障信号特征提取的具体步骤包括:步骤1)保存采集到的齿轮箱中的混合信号。步骤2)选取的五种传感器信号特征参数进行归一化处理。步骤3)对声发射传感器进行降噪处理,利用皮尔逊系数来描述两个参数变量之间的相关性大小,对数据相关性结合声发射各特征参数的密切程度建立联系。步骤4)建立关于特征参数的图模型。图模型需要包含图的节点数据和边的权重。获取具体时间的各节点的数据信息,并且记录各节点之间的拓扑结构,其图模型的简化定义表达式如g=(da,de)。这里,da表示节点上信号数据集合,de表示无向边权重集合。步骤5)对图模型节点之间进行权重选择。步骤6)采用马氏距离来确定具体时刻参数之间的权重步骤7)建立出两种不同类型的数据快照图。步骤8)第一种类型利用矩阵表示,包含n节点参数数据和e条连接边权重,其变量变成了n+e个节点和权重直接反映了某时刻的数据状态。步骤9)第二种采用相邻时刻的数据进行作差,显示出参数节点数据的增量和边权重的增量。利用矩阵表示行数据包含n节点参数数据增量和e条连接边权重增量,其变量变成了n+e个节点,列数据变成了前后时间差。步骤10)利用数据快照图模型对传感器信号进行阶段判断,通过计算相邻时刻的数据快照图模型之间的距离所属的区间阈值来判断信号的所属阶段。步骤11)使用主成分分析法对变量数据进行压缩,用少量的数据主要方面来代替原始数据。步骤12)提取信号
9.选取的声发射信号、振动信号、噪声信号、油温信号、油压信号的特征参数分但选取的信号特征参数存在于多个维度,为了消除差异,选取的特征参数拉到同一维度构建联系分析,对选取的五个声发射特征参数进行中的归一化处理。根据各变量在不同单位间取值的差异程度大小来决定其在分析中的重要性程度其参数归一化表达式
10.步骤3)中,首先建立路图信号与声发射信号之间的变换关系。声发射采集信号相对应的路图信号用矩阵形式表示如下。x=[x0,x1,x2,...,x
t
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0011]
为了消除噪声对声发射的影响,所采集的声发射信号和噪声信号本质上是由原始信号和噪声信号组成,每个采集信号可以用表达式表示x(t)=x0(t)+φ(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)其中,x0(t)是真实的声发射信号,φ(t)是噪音信号。
[0012]
使用皮尔逊系数常用来描述两个参数变量之间的相关性大小,表达式如下
这里,cov(x,y)表示两个参数变量的协方差,σ
x
σy表示两参数变量的标准差。ρ
x,y
变化范围是-1到1,表明从负相关到正相关。
[0013]
在步骤6)中,采用马氏距离不仅能有效的表示两个未知样本集的相似度,也能考虑到数据特征之间的联系和数据的分布。x,y是分别从两个独立样本群中随机抽取的样本点,那么x,y之间的马氏距离可以用如下表达式表示这里,∑-1
为两样本的协方差矩阵,dm(x,y)表示马氏距离
[0014]
当计算样本点x与样本群之间的距离时,可以用如下表达式:这里的u为样本群的均值向量
[0015]
步骤11)中使用主成成分分析。建立数据快照图模型类型一的k阶主成分序列,建立降维形成主成分序列如下矩阵。
[0016]
与二维变量降维成一维变量类似的降维过程,通过构建新的坐标轴进行降维。其主成分分析流程如下表
[0017]
进行样本数据的中心化和标准化,之后对样本进行协方差计算得到数据的协方差矩阵,获取协方差矩阵的特征值和对应的特征向量,将特征值从大向小排序获得前k个特征值(累计解释率大于需求),这里的特征值越大,代表包含的数据信息量显得越大。
[0018]
利用spss软件进行计算选择大于90%的解释率,最后提取主成分。
[0019]
本发明的有益效果是:提出一种多种传感器、多通道信号为基础的多信号融合图形识别故障诊断方法,该方法具有准确率高的优点;利用信号特征参数数据进行归一化处理相关性对参数之间建立联系,有效筛选出对材料损伤分析具有可靠性的特征参数;利用
信号特征参数的归一化数据及数据之间的马氏距离建立数据快照图模型,实现对齿轮箱状态的可视化模式识别。
[0020]
传感器采集的多通道原始信号数据存在于复杂且不规则的拓扑结构之中,很难通过传统信号技术进行处理。数据快照图模型提供了这些复杂数据与拓扑结构之间的交互建模的能力,利用图模型优势将多种传感器的信号特征参数放到同一维度对信号进行分析,给出齿轮箱的损伤状态判断,从而减少因齿轮箱故障出现的安全生产问题。
附图说明
[0021]
图1为本发明的传感器布置示意图;
[0022]
图2为算法的流程图;
[0023]
图3为本发明方法信号参数数据快照图;
[0024]
图4为本发明方法的数据快照图类型一;
[0025]
图5为本发明方法的数据快照图类型二;
具体实施方式
[0026]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、详细地描述。所描述的实施例仅是本发明的一部分实施例。
[0027]
本发明解决上述技术问题的技术方案是:
[0028]
参照图1是本发明的一种实施例为一种风力发电机齿轮箱多种传感器一体测量技术的故障监测与诊断的结构示意图。本发明提供了包括:声发射传感器(1)、噪声传感器(2)、位移传感器(3)、振动传感器(4)、油温传感器(5)。所诉振动传感器(4)安装在风力发电机齿轮箱低速轴、高速轴和壳体上;噪声传感器(2)安装在齿轮箱外壳;油温传感器(5)安装在齿轮箱邮箱内;位移传感器(3)安装在后轴承座;声发射传感器(1)安装在高速轴上。
[0029]
参照图2至图5,本发明的一种实施例为一种利用多信号融合处理风机齿轮箱故障诊断方法,具体步骤如下:
[0030]
步骤1)保存以风力机齿轮箱为代表大型旋转机械设备在实际运行时发生故障用接收机采集的混合信号;
[0031]
步骤2)选取的五种传感器信号特征参数进行归一化处理。
[0032]
步骤3)对声发射传感器进行降噪处理,利用皮尔逊系数来描述两个参数变量之间的相关性大小,对数据相关性结合声发射各特征参数的密切程度建立联系。x=[x0,x1,x2,...,x
t
]
t
ꢀꢀꢀ
(2)
[0033]
步骤4)建立关于特征参数的图模型。x(t)=x0(t)+φ(t)
ꢀꢀꢀ
(3)
[0034]
步骤5)对图模型节点之间进行权重选择。
[0035]
步骤6)采用马氏距离来确定具体时刻参数之间的权重
[0036]
步骤7)建立出两种不同类型的数据快照图。
[0037]
步骤8)数据快照图类型一,包含n节点参数数据和e条连接边权重,其变量变成了n+e个节点和权重直接反映了某时刻的数据状态。
[0038]
步骤9)数据快照图类型二采用相邻时刻的数据进行作差,显示出参数节点数据的增量和边权重的增量。利用矩阵表示行数据包含n节点参数数据增量和e条连接边权重增量,其变量变成了n+e个节点,列数据变成了前后时间差。
[0039]
步骤10)利用数据快照图模型对传感器信号进行阶段判断,通过计算相邻时刻的数据快照图模型之间的距离所属的区间阈值来判断信号的所属阶段
[0040]
步骤11)使用主成分分析法对变量数据进行压缩,用少量的数据主要方面来代替原始数据。
[0041]
步骤12)提取信号。
[0042]
以下结合具体实例对步骤11)的主成成分分析法进一步的阐述。通过pac算法实现不丢失大量数据成分的情况下,亦可通过长方形的主对角线来完成二维到一维数据的转化来完成降维的目的。将特征值从大向小排序获得前k个特征值(累计解释率大于需求),这里的特征值越大,代表包含的数据信息量显得越大。最后提取主成分。
[0043]
下表为主成分分析流程表中的pca具体算法下表为主成分分析流程表中的pca具体算法
[0044]
进一步地,,对步骤11中使用主成成分分析,建立数据快照图模型类型一的k阶主
成分序列,k阶邻接和k阶均值算法等都在研究背景下结合节点数据来构建图模型。其中θ,k是根据数据信号设置的参数,dist(i,j)可代表节点之间的马氏距离等距离度量。
[0045]
将获得的两种数据快照图方式做对比,第一种是以节点参数数据和边权重为变量,第二种是以节点数据和边权重的增量为变量,都是共15个变量;之后分别进行主成分分析,在满足主成分分析的基本要求的基础上得到之后的主成分序列,主成分的个数k值不同其数据解释率不同,通过确定主成分个数之后,通过建立主成分序列,通过利用欧式距离计算方法来计算不同损失状态的主成分序列之间的距离,获得各不同损失状态阶段多元时间序列之间的距离,从而作出故障状态判别。通过具体信号的主成分距离能够很好地区分辨别齿轮箱关键零部件的故障位置与故障类型。
[0046]
在不同部件的故障诊断过程中,所选用的传感器类型有所不同,对不同类型齿轮箱检查测点的布置位置也有所不同,本方法的提供的故障诊断方式可以根据实际条件进行传感器类型、规格数量和测点位置的选择,所分析的特征参数可根据实际需要进行调整,以确保本方法的可行性。
[0047]
以上实施例仅用以说明本发明的技术方案而并非对其进行限制,凡未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1