一种基于静态扭矩标准机的旋转扭矩校准装置的制作方法
1.本发明涉及一种基于静态扭矩标准机的旋转扭矩校准装置,特别涉及一种基于静态扭矩标准原理的,对相位差式扭矩测量系统或扭矩传感器进行旋转校准的装置。
背景技术:
2.相位差式扭矩传感器结构一般由转轴部分和外壳固定部分组成,只能在旋转状态才能进行测量和校准。目前,相位差式扭矩测量系统正常工作状态是轴系旋转,外壳不动,因此以往对其进行校准都是轴系旋转,外壳不动。这样只能在旋转试验台上进行动态校准,但是目前国际国内的旋转试验台功率都较低,普遍只能校准5knm以下的相位差式扭矩测量系统。此类扭矩传感器校准需求的扭矩值范围越来越大,目前的校准方法不能满足需求。而通过增加功率的方式来提高校准上限,不但成本高,也较难实现。
3.经查询国内外专利和相关论文,目前均没有此类校准装置。市场上通用的转矩转速传感器,以湘仪公司产品为代表,采用磁电式相位差原理,按照jjg924的校准方法,该类传感器校准时,外壳整体也是不转动的,只是磁圈转动,其结构和适用范围与本发明有本质区别。国内、外无类似校准装置。
技术实现要素:
4.本发明是针对相位差式扭矩测量系统或扭矩传感器,目前的校准方法和条件不能满足校准需求的问题,而提出一种基于静态扭矩标准机的旋转扭矩校准置。一方面,通过标准力臂和砝码产生标准扭矩值,另一方面,通过与传统校准方式不一样的电机驱动外壳旋转的方法,使得相位差式扭矩传感器旋转轴与外壳产生相对转动,从而得到相位差测量校准的条件,可进行动态校准,这样可以满足大扭矩相位差式扭矩传感器校准需求,使校准扭矩范围可达到200knm。
5.本发明的技术方案为:一种基于静态扭矩标准机的旋转扭矩校准装置,用于校准相位差式扭矩传感器,将被校相位差式扭矩传感器的旋转轴通过法兰串接在旋转扭矩校准装置中,旋转扭矩校准装置一端通过标准力臂系统进行扭矩加载,给被校相位差式扭矩传感器一个标准的扭矩值,被校相位差式扭矩传感器的外壳通过两端的轴承安装到联接法兰轴上,所述外壳通过皮带轮及皮带连接旋转扭矩校准装置的工作台上的电机,使得外壳在电机和皮带轮的拖动下旋转,从而使得相位差式扭矩传感器的旋转轴和外壳产生相对转动,进行扭矩测量和校准。
6.进一步,所述旋转扭矩校准装置另外一端连接电机拉平系统,电机拉平系统由电机和减速器组成,通过电机和减速器将标准力臂拉平,使得作用在相位差式扭矩传感器中的扭矩值准确、可靠。
7.进一步,所述电机安装在工作台上,并位于相位差式扭矩传感器正下方,使相位差式扭矩传感器和轴系上不产生侧向力,只有正压力作用到旋转扭矩校准装置上,避免产生测量误差。
8.进一步,所述电机通过垫片调整高度,以保持皮带松紧适度。
9.进一步,所述相位差式扭矩传感器为基于光纤的相位差式扭矩传感器,光纤及其信号处理部件安装到被校相位差式扭矩传感器的外壳上,信号处理部件均匀布置在相位差式扭矩传感器外壳的圆周上,以减小动平衡量。
10.进一步,所述标准力臂系统与扭矩标准机联接轴相连接,扭矩标准机联接轴通过联接法兰连接相位差式扭矩传感器的旋转轴,砝码加载到标准力臂系统的端部,其作用点到轴系中心的距离经过准确计量,所述砝码与标准力臂系统共同作用产生标准扭矩值,该标准扭矩值作用到被校相位差式扭矩传感器上,在被校相位差式扭矩传感器外壳的旋转共同作用下,产生相位差值,该相位差值与扭矩值成线性比例关系,从而对相位差式扭矩传感器进行校准。
11.本发明的有益效果在于:本发明基于静态扭矩标准机的原理,通过外壳旋转的方式,进行扭矩校准,可满足200knm以内的相位差式扭矩测量系统的校准,解决了旋转试验台扭矩范围不够的难题,具有设计新颖、结构简单、巧妙、扭矩范围大、校准效率高的优点,填补了国际国内空白。
附图说明
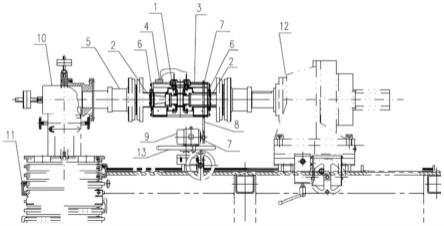
12.图1是本发明的基于静态扭矩标准机的旋转扭矩校准装置结构示意图;
13.图中:1—被校相位差式扭矩传感器旋转轴,2—联接法兰,3—被校传感器外壳,4—信号处理部件,5—扭矩标准机联接轴,6—轴承,7—皮带轮,8—齿形皮带,9—电机,10—标准力臂系统,11—砝码,12—电机拉平系统,13—工作台。
具体实施方式
14.下面结合附图与实施例对本发明作进一步说明。
15.如图1所示,本发明的基于静态扭矩标准机的旋转扭矩校准装置,被校相位差式扭矩传感器旋转轴1,通过两端联接法兰轴2与静态扭矩标准机串接。被校传感器外壳3的两端通过轴承6安装到联接法兰轴2上。在被校传感器外壳3上设置有皮带轮7,在工作台13上设置有电机9,电机9的输出轴上设置有皮带轮7。上下两个皮带轮通7过齿形皮带8传动,使得齿形皮带8与皮带轮7不打滑,以保证转速稳定。电机9在其电控系统的作用下,驱动被校传感器外壳3匀速旋转。这样在被校相位差式扭矩传感器旋转轴1不转动的情况下,被校相位差式扭矩传感器旋转轴1与被校传感器外壳3产生相对转动。
16.工作状态时,被校相位差式扭矩传感器旋转轴1应是旋转、被校传感器外壳3不动。常规校准状态也与工作状态一样。本发明的校准装置将旋转对象对调,同样达到产生相位差的效果,因此可以进行扭矩测量和校准。
17.电机9安装在工作台13上,在传感器轴系正下方,这样在轴系上不产生侧向力,只有正压力作用到校准装置上,避免产生测量误差。电机9通过垫片调整高度,以保持皮带松紧适度。
18.图1所示的被校扭矩传感器为一种基于光纤的相位差式扭矩传感器,光纤及其信号处理部件4安装到被校传感器外壳3上,信号处理部件4在被校传感器外壳3圆周均匀布置,以减小动平衡量,必要时,被校传感器外壳3带信号处理部件4一起做动平衡试验。信号
处理部件4采用基于fpga的频率信号处理电路,电路板安装在不锈钢结构的盒子中,通过接插件完成信号的输入输出。
19.标准力臂系统10与扭矩标准机联接轴5相连接,扭矩标准机联接轴5通过联接法兰2连接被校相位差式扭矩传感器旋转轴1,砝码11作用到标准力臂系统10的端部,其作用点到轴系中心的距离经过准确计量。砝码11与标准力臂系统10共同作用产生标准扭矩值,该标准扭矩值作用到被校相位差式扭矩传感器1上,在被校传感器外壳3的旋转共同作用下,产生相位差值,该相位差值与扭矩值成线性比例关系。从而对扭矩传感器进行校准。
20.当砝码11加载到标准力臂系统10之上后,标准力臂系统10会产生微量倾斜,这样产生的扭矩值不准确,有误差。因此,在校准装置轴系的另外一端,连接电机拉平系统12,采用电机拉平系统12将倾斜的标准力臂系统10拉平,保证产生的扭矩值准确。可由位移传感器对力臂系统10是否水平进行控制。电机拉平系统12由电机和减速器组成。标准力臂系统10是典型的刀口支承力臂系统,中间有一个主刀口,两侧各有一个副刀口,通过计量测定主刀口与两侧副刀口的准确距离,从而保证标准砝码11加载后能够产生准确的标准扭矩值。标准力臂10处于水平位置,当砝码11加载后,加载端力臂往下倾斜,下方的激光位移传感器感受到倾斜后发出信号,通过电机拉平系统12,使电机反向旋转,通过减速器驱动轴反转,将标准力臂拉平,此时激光位移传感器输出指令,电机停止动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1