超精密全口径抛光机气浮转台静态位置测量装置及方法与流程
1.本发明属于超精密大型气浮转台测量技术领域,具体涉及超精密全口径抛光机气浮转台静态位置测量装置及方法。
背景技术:
2.全口径抛光机是加工大口径平面光学元件的关键设备,其主要的组成为稳定性和刚性好的大直径圆形大理石抛光转台,其表面为沥青附着的打磨面,附着沟壑用于润滑液以及磨削屑的排放。抛光转台面上依次放有修正盘以及工件盘,工件盘用于固定工件,修正盘用于精准控制抛光平面的精度。抛光转台的支承系统为外部供气的气浮系统,在大理石抛光转台的底部设有供气槽,外部提供0.2-0.8mpa的供气压力,可以将转台稳定的浮起。
3.抛光转台具备很大的质量,同时加工工件以及修正盘也具备一定质量。但由于抛光转台自身可能存在的不平整和质量不均,以及工件盘和修正盘的位置不均,可能会导致转台气膜分布不均。同时由于气体具有很强的可压缩性,流场的流动可能存在波动。这些将影响气膜压力分布和承载力等静态特性,降低转台稳定性,导致动态旋转轨迹发生改变,致使超精密光学工件的形状误差,表面质量等出现变化,从而不能达到使用要求。
4.转台静态位置反应机床的固有属性,一般包含气膜高度、转台偏角、转台最高最低点高度及位置。它是转台静动态分析的基础,同时对机床精度的控制有着关键作用。转台静态位置现有的测量装置主要集中于中小型抛光机,且基本不考虑转台的偏角。全口径抛光机由于抛光转台尺寸和质量很大,其位置测量比较困难。因此,实现这种大型重型抛光转台静态位置的准确测量,将能更好的分析研究静动态特性,从而为改善光学元件的加工质量提供理论基础。
技术实现要素:
5.本发明的目的是解决上述问题,提供一种可以测量抛光机气膜高度、转台偏角、转台最高最低点高度及位置的超精密全口径抛光机气浮转台静态位置测量装置及方法。
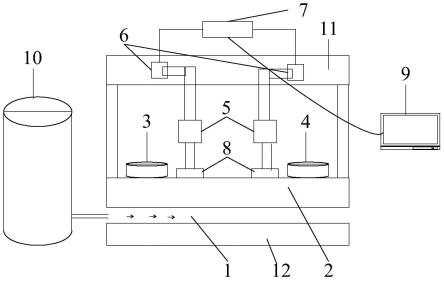
6.为解决上述技术问题,本发明的技术方案是:超精密全口径抛光机气浮转台静态位置测量装置,包括支撑气膜、大理石抛光转台、修正盘、工件盘、激光位移传感器、传感器夹具、数据采集卡、高精度平晶、便携式电脑、供气系统,梁和基台;支撑气膜位于大理石抛光转台和基台之间,供气系统为支撑气膜供气,修正盘、工件盘、高精度平晶和梁均位于大理石抛光转台上,工件放置在工件盘上;传感器夹具安装在梁上,激光位移传感器与传感器夹具固连,并与数据采集卡电连接,数据采集卡与便携式电脑电连接,激光位移传感器检测高精度平晶的数据后,通过数据采集卡传递到便携式电脑中。
7.本发明还公开了超精密全口径抛光机气浮转台静态位置测量方法,包括以下步骤:
8.s1、在气浮转台不工作的情况下,即供气系统的供气压力为零,分别将三个激光位移传感器通过传感器夹具吸附在大理石抛光转台的三根梁上,将每根梁作为测量轴;
9.s2、调节激光位移传感器与高精度平晶的位置关系;
10.s3、在测量轴上安装激光位移传感器;
11.s4、运行超精密全口径抛光机气浮转台静态位置测量装置,获得测量数据。
12.进一步地,所述步骤s2中,激光位移传感器的探头对准下方水平放置的高精度平晶,高精度平晶的数量为三个,高精度平晶中心对应下方点位,下方三点位位于同一圆上,三点之间的角度与三根梁角度近似。
13.进一步地,所述步骤s3还包括以下分步骤:
14.s31、在第一根测量轴上2.3m直径位置安装一个传感器,通过卡尺对心测量一个2.3m位置点,标记,传感器测量点对齐后固定;
15.s32、根据现场测量合适角度,顺时针转125度,在第二根测量轴上2.3m直径位置安装二号传感器,并将二号传感器测量点对齐与旋转过来的标记点;顺时针旋转110度,在第三根测量轴上2.3m直径位置安装三号传感器,并将三号传感器测量点对齐旋转过来的标记点。
16.进一步地,所述步骤s4还包括以下分步骤:
17.s41、打开供气系统,在基台和大理石抛光转台间形成支撑气膜,将大理石抛光转台浮起,在工件盘安装工件;
18.s42、有气压时放下修正盘,之后放干净气体,归零三个激光位移传感器,将供气压力为零时平面设定为参考0位置基准面;
19.s43、改变供气压力0.25/0.5/0.75-0.75/0.5/0.25mpa,可反复重复多次,测试不同供气压力时三点的数值为空间z坐标值,由于高精度平晶的位置定好之后不再改变,故x,y坐标已确定;查看传感器参数,传感器数值即表示不同点位的气膜厚度,不同情况差值即表示气膜厚度变化量;
20.s44、找到每组数据组成的圆的圆心,算出空间圆面的法向量,求出法向量和z坐标轴向量(0,0,1)夹角即为转台偏角;
21.s45、r已知,通过几何关系,由转台偏角计算出转台最高最低点高度;
22.s46、空间圆即球体为被平面截取一个面所得,空间圆的方程为空间球面方程与空间平面方程联立方程组。
23.进一步地,所述步骤s46中的联立方程组具体为:s44中的每组数据也可组成平面,该平面的法向量也是s44中空间圆面的法向量,平面上三点已知,平面方程可以求得;以s44中求得的圆心为球心,测距为半径,建立球面方程;将平面方程和球面方程联立,将s45中得出的转台最高最低点高度值作为z坐标值,便可求解得出x,y坐标值,即对应最高最低点的位置。
24.本发明的有益效果是:本发明所提供的超精密全口径抛光机气浮转台静态位置测量装置,结构精简,易于操作实施。同时,给出了一种测试气膜厚度的“三点测量法”,通果测量结果给出了气压对气膜厚度、转台偏角、转台最高最低点高度及位置的影响。解决了大型气浮转台测量困难的问题,研究结果可为气浮转台的静动态特性分析和性能优化提供指导。
附图说明
25.图1是本发明超精密全口径抛光机气浮转台静态位置测量装置的结构示意图;
26.图2是本发明测试安装点分布图;
27.图3是本发明测量结果气膜厚度示意图;
28.图4是本发明测量结果转台最高最低点位置示意图;
29.附图标记说明:1、撑气膜;2、大理石抛光转台;3、修正盘;4、工件盘;5、激光位移传感器;6、传感器夹具;7、数据采集卡;8、高精度平晶;9、便携式电脑;10、供气系统;11、梁;12、基台。
具体实施方式
30.下面结合附图和具体实施例对本发明做进一步的说明:
31.如图1到图4所示,本发明提供的超精密全口径抛光机气浮转台静态位置测量装置,包括支撑气膜1、大理石抛光转台2、修正盘3、工件盘4、激光位移传感器5、传感器夹具6、数据采集卡7、高精度平晶8、便携式电脑9、供气系统10、梁11和基台12;支撑气膜1位于大理石抛光转台2和基台12之间,供气系统10为支撑气膜1供气,修正盘3、工件盘4、高精度平晶8和梁11均位于大理石抛光转台2上,工件放置在工件盘4上。传感器夹具6安装在梁11上,激光位移传感器5与传感器夹具6固连,并与数据采集卡7电连接,数据采集卡7与便携式电脑9电连接,激光位移传感器5检测高精度平晶8的数据后,通过数据采集卡7传递到便携式电脑9中。
32.在本实施例中,激光位移传感器5、传感器夹具6和高精度平晶8的数量相同,激光位移传感器5通过传感器夹具6固定在梁11上。激光位移传感器5与高精度平晶8一一对应。
33.本发明还公开了超精密全口径抛光机气浮转台静态位置测量方法,包括以下步骤:
34.s1、在气浮转台不工作的情况下,即供气系统10的供气压力为零,分别将三个激光位移传感器5通过传感器夹具6吸附在大理石抛光转台2的三根梁11上,将每根梁11作为测量轴。
35.s2、调节激光位移传感器5与高精度平晶8的位置关系。
36.在步骤s2中,激光位移传感器5的探头对准下方水平放置的高精度平晶8,高精度平晶8的数量为三个,高精度平晶8中心对应下方点位,下方三点位位于同一圆上,三点之间的角度与三根梁11角度近似。
37.s3、在测量轴上安装激光位移传感器5。
38.步骤s3还包括以下分步骤:
39.s31、在第一根测量轴上2.3m直径位置安装一个传感器,通过卡尺对心测量一个2.3m位置点,标记,传感器测量点对齐后固定。
40.s32、根据现场测量合适角度,顺时针转125度,在第二根测量轴上2.3m直径位置安装二号传感器,并将二号传感器测量点对齐与旋转过来的标记点;顺时针旋转110度,在第三根测量轴上2.3m直径位置安装三号传感器,并将三号传感器测量点对齐旋转过来的标记点。
41.s4、运行超精密全口径抛光机气浮转台静态位置测量装置,获得测量数据。
42.本发明的原理为:传感器数值即表示气膜厚度,找到每组数据组成的圆的圆心,算出空间圆面的法向量,求出法向量和z坐标轴向量夹角即为转台偏角。通过几何关系,由转台偏角计算转台最高最低点高度,进而计算出它们的位置。
43.所述步骤s4还包括以下分步骤:
44.s41、打开供气系统10,在基台12和大理石抛光转台2间形成支撑气膜1,将大理石抛光转台2浮起,在工件盘4安装工件。
45.s42、有气压时放下修正盘3,之后放干净气体,归零三个激光位移传感器5,将供气压力为零时平面设定为参考0位置基准面。
46.s43、改变供气压力0.25/0.5/0.75-0.75/0.5/0.25mpa,可反复重复多次,测试不同供气压力时三点的数值为空间z坐标值,由于高精度平晶8的位置定好之后不再改变,故x,y坐标已确定;查看传感器参数,传感器数值即表示不同点位的气膜厚度,不同情况差值即表示气膜厚度变化量。
47.在改变供气压力之前,将激光位移传感器5连接至数据采集卡7,数据采集卡7连接便携式电脑9,便于收集和处理数据信息。
48.s44、找到每组数据组成的圆的圆心,算出空间圆面的法向量,求出法向量和z坐标轴向量(0,0,1)夹角即为转台偏角。
49.在步骤s44中,每组数据组成的圆的圆心记为(x0,y0,z0),法向量为(a,b,c)。其中x0,y0,z0为圆心坐标数值,a,b,c为法向量数值。
50.s45、r已知,通过几何关系,由转台偏角计算出转台最高最低点高度。
51.s46、空间圆即球体为被平面截取一个面所得,空间圆的方程为空间球面方程与空间平面方程联立方程组。
52.在步骤s46中的联立方程组具体为:s44中的每组数据也可组成平面,该平面的法向量也是s44中空间圆面的法向量,平面上三点已知,平面方程可以求得。以s44中求得的圆心为球心,测距为半径,建立球面方程;将平面方程和球面方程联立,将s45中得出的转台最高最低点高度值作为z坐标值,便可求解得出x,y坐标值,即对应最高最低点的位置。
[0053][0054]
其中(x0,y0,z0)为圆心且已知,r为测距且已知,(a,b,c)是平面的法向量且已知,(a,b,c)是平面上一点且已知,z为转台最高最低点高度值且已知。
[0055]
上式可转化为二元方程组,求出x,y即为转台最高最低点的位置,如图3所示。
[0056]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1