一种水下可调节式展开器的制作方法
1.本发明涉及水声探测技术领域,具体涉及一种水下可调节式展开器。
背景技术:
2.光纤水听器是一种检测水下声信号的传感器,利用高灵敏度的光学相干检测,将水声振动转换成光信号,并通过光纤线缆传递至信号处理系统,进而提取处声信号实现水下目标探测。光纤水听器用于水下声目标监测,已经得到成熟化的应用。但是,在水流波动较大的水域,光纤水听器在水中的姿态难以保持水平,进而难以有效的最大化捕获声目标。
3.目前,光纤水听器在监测水下声目标时,通常借助一种水下驱动式展开器实施水下铺设。该水下驱动式展开器包括推进器、耐压筒体、浮力调节系统、张力传感器、光电滑环、玻璃微珠浮力块、伞形收缩装置和电池组。工作时,展开器迎流前进,牵引光纤水听器阵列,光纤水听器阵列末端悬挂海流帆。海流帆会随着海流的方向转动获得最大的迎流面积和迎流阻力,使水听器列阵在水中完全展开。
4.然而,上述方案中位保持光纤水听器阵列的水平姿态,仅仅依靠水流自动调节。当探测水域中的水流出现较大的波动起伏时,光纤水听器阵列的水平姿态将遭到破坏,并且缺乏人为干预设备达到水平姿态的应急措施。
5.除此之外,上述展开器工作时水流对伞面的流阻较大,推进器长时间处于负荷状态,产生的噪音也会干扰整个系统对环境和目标噪声的监测。
6.综上所述,在光纤水听器水下布设的过程中,如何设计一种展开装置,用以实现主动调节光纤水听器阵列的姿态,保持光纤水听器阵列的水平姿态,进而使得光纤水听器适用于复杂水域的声目标监测,就成为本领域技术人员亟待解决的技术问题。
技术实现要素:
7.本发明的目的在于,为光纤水听器水下布设的过程中,提供一种展开装置,用以实现主动调节光纤水听器阵列的姿态,保持光纤水听器阵列的水平姿态,进而使得光纤水听器适用于复杂水域的声目标监测。
8.为实现上述目的,本发明采用如下方案:提出一种水下可调节式展开器,包括壳体、底部绞车、阵尾绞车和提供正浮力的浮体,所述底部绞车上卷绕有缆绳,所述缆绳的自由端连接有钩锚,所述阵尾绞车上卷绕有光缆,所述光缆的自由端与光纤水听器阵列相连,所述浮体位于壳体内;所述壳体的内部具有容纳底部绞车和阵尾绞车的工作舱,所述工作舱位于壳体的中后部,所述壳体的首端设置有为水下可调节式展开器供电的电池舱,所述壳体的尾端设置有供光缆的自由端伸出的排缆口,所述壳体的底部设置有供缆绳穿过的缆绳出口;其中,所述底部绞车通过收放缆绳带动锚钩,用于调节展开器位于水下的深度,所述阵尾绞车通过收放光缆带动光纤水听器阵列,用于调整光纤水听器阵列的姿态。
9.作为优选,工作舱的内部设置有水平布置的隔板,隔板与工作舱的内壁相连,且沿
着壳体的轴线将工作舱分隔为上舱体和下舱体,底部绞车的卷筒位于上舱体内,阵尾绞车的卷筒位于下舱体内。如此设置,底部绞车和阵尾绞车形成错位排布,有利于工作舱在深度方向上保持自身平衡,避免了展开器发生沿自身轴线翻转的情况,进而有利于保证展开器尾端拖曳的水听器阵列姿态的稳定。
10.作为优选,底部绞车的重心位于水下调节式展开器的重心轴线上,阵尾绞车的重量与电池舱的重量相等。如此设置,有利于保持展开器两端的平衡。
11.作为优选,阵尾绞车包括电机、卷筒、传动机构、第一安装座、以及随卷筒的转动沿着卷筒的轴向滑动的排缆机构,一对第一安装座平行布设于隔板上,卷筒位于一对第一安装座之间,卷筒的端部与第一安装座相连,电机的输出轴与卷筒的主动端相连,卷筒的从动端通过传动机构与排缆机构的动力端相连,排缆机构的出口正对于排缆口。如此设置,排缆机构用以将被卷筒释放的光缆转向,并引导至壳体的排缆口,减少了光缆收放过程中的摆动,排缆机构随着卷筒的转动沿着卷筒的轴向滑动,有利于光缆在收卷过程中,光缆在卷筒上有序排列。
12.作为优选,排缆机构包括第二安装座、导向轮、驱动丝杆、导向杆和支架,一对第二安装座平行布设于隔板上,驱动丝杆和导向杆均位于一对第二安装座之间,驱动丝杆的端部与第二安装座相连,驱动丝杆的轴线平行于卷筒的轴线,导向杆的端部与第二安装座相连,导向杆的轴线平行于驱动丝杆的轴线,驱动丝杆的动力端通过传动机构与卷筒的从动端相连,支架通过丝杆螺母与滚珠丝杆相连,支架上设置有供导向杆穿过的滑槽,导向杆嵌入在滑槽内,导向轮与支架相连。如此设置,电机的驱动力通过卷筒经传动机构传递至驱动丝杆,驱动丝杆转动带动支架沿着卷筒的轴向滑动,便于排缆机构与卷筒共用一个电机,优化了动力结构。
13.作为优选,传动机构包括主动带轮、从动带轮和传动带,主动带轮与卷筒的从动端相连,从动带轮与驱动丝杆的动力端相连,主动带轮通过传动链与从动带轮相连。
14.作为优选,光缆沿着卷筒的轴线呈螺旋线状卷绕,光缆的固定端连接有光纤滑环,光纤滑环的定子与阵尾绞车的机架相连。如此设置,光纤滑环用于阵尾绞车转动时,保证光缆正常传递光信号,保证光缆不相对旋转而产生破断,而且提升了光缆承受轴向拉力的载荷。
15.作为优选,光缆呈等螺距的螺旋线状卷绕,螺距与光缆的直径相等。如此设置,便于光缆在卷筒上紧密排布。
16.作为优选,缆绳为凯夫拉绳,凯夫拉绳的自由端与钩锚相连。如此设置,进一步提高了缆绳的耐磨性和拉伸强度。
17.作为优选,凯夫拉绳沿着卷筒的轴线呈螺旋线状卷绕,并将凯夫拉绳的固定端压在最内侧。如此设置,凯夫拉绳的固定端被自身卷绕结构压在卷筒的侧壁上,有利于展开器回收时,底部绞车完全释放缆绳,凯夫拉绳的固定端能够自然与卷筒相分离,无需再底部绞车上增设用于切断缆绳的装置,进一步优化了底部绞车的结构。
18.本发明提供的一种水下可调节式展开器与现有技术相比,具有如下突出的实质性特点和显著进步:该水下可调节式展开器利用底部绞车通过收放缆绳带动锚钩,进而实现深度的调节,利用阵尾绞车通过收放光缆带动光纤水听器阵列,实现了对光纤水听器阵列姿态的主动调整,保证了光纤水听器阵列在水平姿态的稳定性,使得光纤水听器适用于复
杂水域的声目标监测,同时,当底部绞车和阵尾绞车停止工作,展开器处于静默状态,不产生任何噪音,从而可以减少设备自身产生的噪音对光纤水听器阵列的影响,有效提高了工作效率。
附图说明
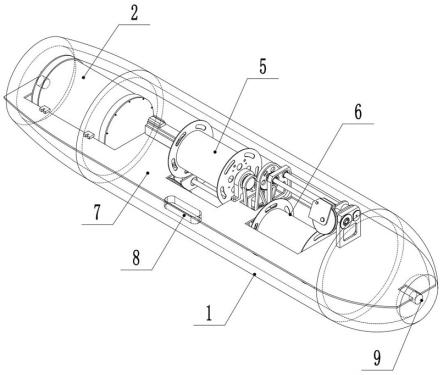
19.图1是本发明实施例中一种水下可调节式展开器的结构简图;图2是本发明实施例中一种水下可调节式展开器的立体结构示意图;图3是图2的主视图;图4是本发明实施例中一种水下可调节式展开器的内部结构示意图;图5是阵尾绞车的立体结构示意图;图6是图4中阵尾绞车在另一视角的立体结构示意图;图7是阵尾绞车的手动控制流程图;图8是本发明实施例中一种水下可调节式展开器的工作流程示意图。
20.附图标记:1、壳体;2、电池舱;3、钩锚;4、光缆;5、底部绞车;6、阵尾绞车;7、隔板;8、缆绳出口;9、排缆口;61、电机;62、卷筒;63、传动机构;64、第一安装座;65、第二安装座;66、导向轮;67、驱动丝杆;68、导向杆;69、支架;631、主动带轮;632、从动带轮;633、传动带。
具体实施方式
21.下面结合附图对本发明的具体实施方式进行详细描述。
22.如图1-6所示的一种水下可调节式展开器,用以在光纤水听器水下布设的过程中,实现主动调节光纤水听器阵列的姿态,并保持光纤水听器阵列的水平姿态。该水下调节式展开器利用底部绞车通过收放缆绳带动锚钩,进而实现深度的调节,利用阵尾绞车通过收放光缆带动光纤水听器阵列,实现了对光纤水听器阵列姿态的主动调整,保证了光纤水听器阵列在水平姿态的稳定性,使得光纤水听器适用于复杂水域的声目标监测。同时,当底部绞车和阵尾绞车停止工作,展开器处于静默状态,不产生任何噪音,从而可以减少设备自身产生的噪音对光纤水听器阵列的影响,有效提高了工作效率。
23.实施例1如图1所示,一种水下可调节式展开器包括壳体1、底部绞车5、阵尾绞车6和提供正浮力的浮体。底部绞车5上卷绕有缆绳。缆绳的自由端连接有钩锚3。阵尾绞车6上卷绕有光缆4。光缆4的自由端与光纤水听器阵列相连。浮体位于壳体1内。
24.如图2所示,壳体1的内部具有容纳底部绞车5和阵尾绞车6的工作舱。工作舱位于壳体1的中后部。壳体1的首端设置有为水下可调节式展开器供电的电池舱2。壳体1的尾端设置有供光缆4的自由端伸出的排缆口9。壳体1的底部设置有供缆绳穿过的缆绳出口8。
25.其中,底部绞车5通过收放缆绳带动锚钩,用于调节展开器位于水下的深度。阵尾绞车6通过收放光缆4带动光纤水听器阵列,用于调整光纤水听器阵列的姿态。
26.如图3结合图4所示,工作舱的内部设置有水平布置的隔板7。隔板7与工作舱的内壁相连,且沿着壳体1的轴线将工作舱分隔为上舱体和下舱体。底部绞车5的卷筒62位于上舱体内。阵尾绞车6的卷筒62位于下舱体内。如此设置,底部绞车5和阵尾绞车6形成错位排布,有利于工作舱在深度方向上保持自身平衡,避免了展开器发生沿自身轴线翻转的情况,
进而有利于保证展开器尾端拖曳的水听器阵列姿态的稳定。
27.为了进一步提升水下可调节式展开器自身的稳定性,底部绞车5的重心位于水下调节式展开器的重心轴线上,阵尾绞车6的重量与电池舱2的重量相等。如此设置,有利于保持展开器两端的平衡。
28.其中,如图1所示,光缆4沿着卷筒62的轴线呈螺旋线状卷绕。光缆4的固定端连接有光纤滑环。光纤滑环的定子与阵尾绞车6的机架相连。如此设置,光纤滑环用于阵尾绞车6转动时,保证光缆4正常传递光信号,保证光缆4不相对旋转而产生破断,而且提升了光缆4承受轴向拉力的载荷。
29.例如,光缆4呈等螺距的螺旋线状卷绕。螺距与光缆4的直径相等。如此设置,便于光缆4在卷筒62上紧密排布。
30.缆绳优选为凯夫拉绳。凯夫拉绳的自由端与钩锚3相连。如此设置,进一步提高了缆绳的耐磨性和拉伸强度。
31.凯夫拉绳沿着卷筒62的轴线呈螺旋线状卷绕,并将凯夫拉绳的固定端压在最内侧。如此设置,凯夫拉绳的固定端被自身卷绕结构压在卷筒62的侧壁上,有利于展开器回收时,底部绞车5完全释放缆绳,凯夫拉绳的固定端能够自然与卷筒62相分离,无需再底部绞车5上增设用于切断缆绳的装置,进一步优化了底部绞车5的结构。
32.如图5所示,阵尾绞车6包括电机61、卷筒62、传动机构63、第一安装座64、以及随卷筒62的转动沿着卷筒62的轴向滑动的排缆机构。一对第一安装座64平行布设于隔板7上。卷筒62位于一对第一安装座64之间。卷筒62的端部与第一安装座64相连。电机61的输出轴与卷筒62的主动端相连。卷筒62的从动端通过传动机构63与排缆机构的动力端相连。排缆机构的出口正对于排缆口9。如此设置,排缆机构用以将被卷筒62释放的光缆4转向,并引导至壳体1的排缆口9,减少了光缆4收放过程中的摆动。排缆机构随着卷筒62的转动沿着卷筒62的轴向滑动,有利于光缆4在收卷过程中,光缆4在卷筒62上有序排列。
33.如图6所示,排缆机构包括第二安装座65、导向轮66、驱动丝杆67、导向杆68和支架69。一对第二安装座65平行布设于隔板7上。驱动丝杆67和导向杆68均位于一对第二安装座65之间。驱动丝杆67的端部与第二安装座65相连。驱动丝杆67的轴线平行于卷筒62的轴线。导向杆68的端部与第二安装座65相连。导向杆68的轴线平行于驱动丝杆67的轴线。驱动丝杆67的动力端通过传动机构63与卷筒62的从动端相连。支架69通过丝杆螺母与滚珠丝杆相连。支架69上设置有供导向杆68穿过的滑槽。导向杆68嵌入在滑槽内。导向轮66与支架69相连。如此设置,电机61的驱动力通过卷筒62经传动机构63传递至驱动丝杆67,驱动丝杆67转动带动支架69沿着卷筒62的轴向滑动,便于排缆机构与卷筒62共用一个电机61,优化了动力结构。
34.其中,传动机构63包括主动带轮631、从动带轮632和传动带633。主动带轮631与卷筒62的从动端相连。从动带轮632与驱动丝杆67的动力端相连。主动带轮631通过传动带633与从动带轮632相连。
35.底部绞车5的结构与阵尾绞车6的结构基本一致,区别在于底部绞车5无需设置光纤滑环。底部绞车5和阵尾绞车6的机架结构均采用5a06铝合金焊接而成。
36.实施例2如图1所示,本发明为一种水下可调节式展开器,总长度为2.8m,截面直径为
0.55m,总重约80kg。该展开器包括阵尾绞车、底部绞车、电池舱、浮体、钩锚。阵尾绞车和底部绞车拟采用出缆口固定的结构形式,即均利用排缆机构输出光缆或者缆绳。为了降低绞车运动对整个展开器平衡的影响,其中底部绞车位于展开器重心轴线上,阵尾绞车重量与电池舱重量基本平衡。其中,展开器的工作海域水深优选为200m。
37.阵尾绞车主要由卷筒组件、排缆机构、光滑环、安装底座、电控柜等组成。其主要结构采用5a06铝合金焊接而成。出缆口固定,减少阵尾缆收放过程中的摆动。展开器的钩锚沉底后,绞车开始收缆,直至整个系统成梯形。光缆采用rov缆,零浮力,使得阵尾绞车在水下收放光缆前后,保持重量不变。由于缆径固定,为简化结构,卷筒组件和排缆机构共用一个电机驱动。阵尾绞车的结构尺寸约830mm(长)
×
450mm(宽)
×
300mm(高),重量约18kg。
38.排缆机构包括传动机构、丝杆滑块、导缆器、机架等,实现阵缆收放过程中阵尾缆在卷筒上的有序排列。排缆电机的输出轴经行星齿轮减速机与丝杆轴直联,带动滑块做直线运动,卷筒每转动一圈,滑块行程不小于10mm(光缆的直径)。选取丝杆导程pb=10mm,因此卷筒到丝杆的减速比为i=1。
39.排缆系统采用驱动丝杆螺纹副设计,负载排线架质量m=5kg,缆对排缆机构的正压力取最大值f
正
=500n,机械效率
ƞ
=0.85,摩擦系数u=0.1,加速时间t=0.05s,速度v=4.78mm/s,排缆电机需要提供的推力:f=(mg+f
正 )(u+v/t)=108n因此,电机所需功率为:p=fv/
ƞ
其中,
ƞ
为电机至滚筒的机械效率,取0.85,经计算可得,p≥0.61w。因此,功率为300w的卷筒电机足够带动卷筒和排缆机构,卷筒和排缆机构采用同步带传动。
40.如图5所示,导缆器主要结构为一个倾斜放置的导向轮。卷筒上的光缆通过导向轮转向90度后从展开器尾部伸出,目的主要有两点:一方面卷筒轴可沿展开器长度方向布置;另一方面,出缆方向始终固定。
41.光纤滑环的作用是阵尾绞车转动时能正常传递光信号。光纤滑环可以在保证光缆不相对旋转而产生破断,而且能一定的承受轴向拉力,光滑环安装在阵尾绞车卷筒轴上,转子部分与绞车轴连接,定子部分水密穿舱连接。例如,转子与卷筒轴固连,定子连接在阵尾绞车机架上。
42.底部绞车整体结构与阵尾绞车基本一致。其主要结构也采用5a06铝合金焊接而成,卷筒组件和排缆机构共用一个电机。底部绞车和钩锚之间采用凯夫拉绳连接。底部绞车的结构尺寸约780mm(长)
×
450mm(宽)
×
300mm(高),重量约17kg。
43.切缆的目的是为了系统回收时将钩锚和底部绞车连接断开,使展开器上浮露出水面便于回收。由于凯夫拉绳不易切断,采用绞车主电机带动卷筒将绳缆全部放出的方式切缆,该方式绞车所需盘缆量小、无需增加机构,绞车体积小。通过压住绳头的方式使绳索能在卷筒上缠绕和全部释放。
44.电池舱内主要放置展开器电池和两个绞车的电控箱,为钛合金耐压舱,结构轻,强度高。阵尾绞车和底部绞车功率均为300w,系统待机72h加24h工作时间内,两绞车分别工作时间预估:3h和2h,电池组电量为1.5kwh,即24v62.5ah电池,电池组为定制产品,尺寸约ф300mm
×
100mm,重量约12kg;电控部分的尺寸240mm
×
220mm
×
420mm,因此,耐压舱大小约ф
350mm
×
700mm,舱体重量约:15kg,整个仪器舱的重量预估约:35kg。
45.浮体拟采用玻璃微珠,主要用于为整个展开器提供所需的浮力。玻璃微珠是一种广泛应用于为海洋设备提供浮力的材料,具有质轻、良好的化学稳定性、吸水率小,耐高压等优点,本方案中玻璃微珠的密度为400kg/m3,耐压强度不小于5mpa。根据展开器的工作要求外型拟采用方形,在洋流作用下可偏降,但不会发生横滚。
46.如图7结合图8所示,底部绞车和阵尾绞车的控制操作可通过远程操控和调试设备实现。通过以太网与主机进行通讯,实现人机交互,如参数设置、实时状态监控、收/放缆的控制等。远程操控通过无线通信设备与主机进行通讯。系统布放到水下后,操控人员实时监控9个深度传感器的深度值,当深度差超过5m时,通过控制展开器阵尾绞车和底部绞车保证阵列水平深度差不超过5m。
47.本发明不局限于上述实施例所述的具体技术方案,除上述实施例外,本发明还可以有其他实施方式。对于本领域的技术人员来说,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等形成的技术方案,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1