一种二维码辅助激光导航的移动系统和方法与流程
1.本发明涉及物流车移动技术领域,具体的讲是一种二维码辅助激光导航的移动系统和方法。
背景技术:
2.目前物流车车体顶部要放置货物,所以激光雷达一般放在车体前。双轮差速驱动方式,局部路径规划一般采用dwa(动态窗口法)算法。车型一般比较高大,适合在宽敞地面行走及取放货,但无法进入狭窄货架进行工作。前置激光导航无法进行360
°
全方位避障,同时,建图过程中由于单激光雷达只能前视,无法时刻保持360
°
扫描建图,会导致最后的地图效果较差。
3.目前物流车导航方式有磁导航、二维码导航、激光导航、视觉导航。磁导航分磁体导航和电磁导航,两者方法相似,磁体导航比电磁导航路径改变相对容易,但磁带易被污染,可靠性较差。应用比较普遍的是二维码+惯导导航方式,定位停靠精度较高,但灵活性不够。激光导航应用也较多,主要是激光+反光板的导航模式,可以有较高精度,但激光测距容易受光照噪声影响,灵活性也较差。而激光slam无反射板导航模式,灵活度虽然较高,当基于栅格图和amcl的纯定位系统,使得定位精度限制在厘米级(2-5cm),无法满足毫米级的精细操作。
技术实现要素:
4.本发明要解决的技术问题是针对以上不足,提供一种二维码辅助激光导航的移动系统和方法。
5.为解决以上技术问题,本发明采用以下技术方案:
6.一种二维码辅助激光导航的移动系统,包括物流区,所述物流区内分布设置有若干个货位,每个货位的旁边均设置有泊位,所述货位和泊位内均设置有二维码,每个货位与相邻的一个泊位对应;
7.所述物流区内设置有若干物流车,所述物流车上设置有二维码识别组件,所述物流车的两个对角处均设置有激光雷达,所述二维码识别组件用于扫描并识别当前货位内的二维码,得到车体相对二维码的位姿偏差信息,所述物流车用于根据车体相对二维码的位姿偏差信息来矫正物流车的位姿后移动至与当前货位对应的泊位内,二维码识别组件还用于在物流车到达与当前货位对应的泊位后扫描识别泊位内的二维码,得到车体相对二维码的位姿偏差信息,物流车还用于根据车体相对二维码的位姿偏差信息来矫正物流车的位姿;
8.所述激光雷达用于在物流车在从当前泊位移动至目标泊位的过程中扫描周围的环境,并通过点云矩阵坐标变换来实现两个雷达数据融合,进行环境二维建图;
9.所述物流车还用于根据二维建图结果进行避障并从当前泊位移动至目标泊位内,所述二维码识别组件还用于在物流车到达目标泊位后扫描识别泊位内的二维码,得到车体
相对二维码的位姿偏差信息,所述物流车用于根据车体相对二维码的位姿偏差信息来矫正物流车的位姿后移动至与目标泊位对应的货位内,二维码识别组件还用于在物流车移动至与目标泊位对应的货位内后扫描识别货位内的二维码,得到车体相对二维码的位姿偏差信息,物流车还用于根据车体相对二维码的位姿偏差信息来矫正物流车的位姿。
10.进一步的,所述物流区内分布设置有若干货架,所述货架的上表面设置有若干二维码,所述二维码识别组件还用于识别货架上的二维码,所述物流车还用于扫描货架上的二维码得到的车体与二维码的位姿偏差信息,并进行位姿矫正,物流车由物流区的地面区域进入货架内是通过提升机来实现的。
11.进一步的,所述物流车采用阿克曼模型四轮转向控制。
12.进一步的,两个激光雷达通过点云矩阵坐标变换实现数据融合。
13.一种二维码辅助激光导航的移动方法,包括以下步骤:
14.步骤1、所述物流车扫描并识别当前货位内的二维码,得到车体相对二维码的位姿偏差信息,并根据车体相对二维码的位姿偏差信息来矫正物流车的位姿;
15.步骤2、物流车通过惯性导航从当前货位移动至与当前货位对应的泊位内;
16.步骤3、物流车通过二维码识别组件识别当前泊位内的二维码,得到车体相对二维码的位姿偏差信息,并根据车体相对二维码的位姿偏差信息来矫正物流车的位姿;
17.步骤4、物流车通过激光salm导航从当前泊位移动目标泊位内;
18.步骤5、物流车通过二维码识别组件识别目标泊位内的二维码,得到车体相对二维码的位姿偏差信息,并根据车体相对二维码的位姿偏差信息来矫正物流车的位姿;
19.步骤6、物流车通过惯性导航从目标泊位移动至与目标泊位对应的货位内;
20.步骤7、物流车通过二维码识别组件识别目标货位内的二维码,得到车体相对二维码的位姿偏差信息,并根据车体相对二维码的位姿偏差信息来矫正物流车的位姿。
21.进一步的,所述步骤4中物流车从当前泊位移动至目标泊位的过程中,物流车的局部路径规划采用阿克曼模型的时间弹性带算法。
22.本发明采用以上技术方案后,与现有技术相比,具有以下优点:
23.本发明的物流车采用阿克曼模型四轮转向控制,以降低物流车的设计高度,使得物流车既能在宽敞的地面区域取货/放货又能进入狭窄的货架内进行工作;物流车的两个对角处均设置有激光雷达,且激光雷达通过点云矩阵坐标变换来实现数据融合,使得物流车能够通过激光雷达360
°
扫描周围物体,提高建图效果,导航过程中可以进行360
°
全方位避障;
24.本发明的物流车通过二维码+惯性导航和激光导航的方式从一个货位移动至另一个货位,仅需要在每个货位和泊位上粘贴二维码,且物流车可通过货位或泊位的二维码对其位姿进行修正,来矫正物流车在物流区内的坐标,并矫正物流车的车身角度,以提高物流车的移动精度,货位之间的路径物流车通过激光导航进行移动,不需要在货位之间粘贴二维码,即具有二维码+惯性导航的精度,又能实现激光导航的灵活性;货位之间的局部路径采用阿克曼模型的时间弹性带算法(teb),动态避障效果优于dwa算法。
25.下面结合附图和实施例对本发明进行详细说明。
附图说明
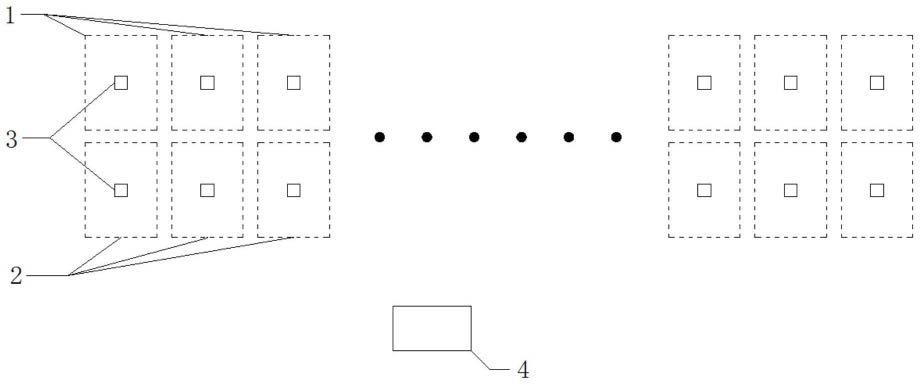
26.图1为本发明的结构示意图;
27.图2为本发明实施例中货位和泊位的示意图;
28.图3为本发明实施例中的激光导航示意图。
29.附图中,各标号所代表的部件列表如下:
30.1、货位;2、泊位;3、二维码;4、物流车。
具体实施方式
31.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
32.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”“顺时针”“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.如图1所示,一种二维码辅助激光导航的移动系统,包括物流区,所述物流区内分布设置有若干个货位1,每个货位1的旁边均设置有泊位2,所述货位1和泊位2内均设置有二维码3,每个货位1与相邻的一个泊位2对应;上面的附图仅是为了解释二维码辅助激光导航的工作原理,实际情况的当前货位和目标货位不一定这样排列,而且两个货位之间的距离一般较远。
34.所述物流区内设置有若干物流车4,所述物流车4上设置有二维码识别组件,所述物流车4的两个对角处均设置有激光雷达,所述二维码识别组件用于扫描并识别当前货位1内的二维码3,得到车体相对二维码的位姿偏差信息,所述物流车4用于根据车体相对二维码的位姿偏差信息来矫正物流车4的位姿后移动至与当前货位1对应的泊位2内,二维码识别组件还用于在物流车4到达与当前货位1对应的泊位2后扫描识别泊位2内的二维码3,得到车体相对二维码的位姿偏差信息,物流车4还用于根据车体相对二维码的位姿偏差信息来矫正物流车4的位姿;
35.所述激光雷达用于在物流车4在从当前泊位2移动至目标泊位2的过程中扫描周围的环境,并通过点云矩阵坐标变换来实现两个雷达数据融合,进行环境二维建图;
36.所述物流车4还用于根据二维建图结果进行避障并从当前泊位2移动至目标泊位2内,所述二维码识别组件还用于在物流车4到达目标泊位2后扫描识别泊位2内的二维码3,得到车体相对二维码的位姿偏差信息,所述物流车4用于根据车体相对二维码的位姿偏差信息来矫正物流车4的位姿后移动至与目标泊位2对应的货位1内,二维码识别组件还用于在物流车4移动至与目标泊位2对应的货位1内后扫描识别货位1内的二维码3,得到车体相对二维码的位姿偏差信息,物流车4还用于根据车体相对二维码的位姿偏差信息来矫正物流车4的位姿。
37.作为一种实施方式,所述物流区内分布设置有若干货架,所述货架的上表面设置有若干二维码3,所述二维码识别组件还用于识别货架上的二维码3,所述物流车4还用于扫描货架上的二维码3得到的车体与二维码3的位姿偏差信息,并进行位姿矫正;
38.物流车4在物流区的地面区域取/放货工作结束后可以通过提升机移动至货架上,
并通过二维码识别组件来识别货架上的二维码,物流车4在货架上是采用二维码+惯导的导航方式,此时激光雷达是不工作的。
39.作为一种实施方式,所述物流车4采用阿克曼模型四轮转向控制。
40.作为一种实施方式,两个激光雷达通过点云矩阵坐标变换实现数据融合。
41.一种二维码辅助激光导航的移动方法,包括以下步骤:
42.步骤1、所述物流车4扫描并识别当前货位1内的二维码3,得到车体相对二维码的位姿偏差信息,并根据车体相对二维码的位姿偏差信息来矫正物流车4的位姿;
43.步骤2、物流车4通过惯性导航从当前货位1移动至与当前货位1对应的泊位2内;
44.步骤3、物流车4通过二维码识别组件识别当前泊位2内的二维码3,得到车体相对二维码的位姿偏差信息,并根据车体相对二维码的位姿偏差信息来矫正物流车4的位姿;
45.步骤4、物流车4通过激光salm导航从当前泊位2移动目标泊位2内;
46.步骤5、物流车4通过二维码识别组件识别目标泊位2内的二维码3,得到车体相对二维码的位姿偏差信息,并根据车体相对二维码的位姿偏差信息来矫正物流车4的位姿;
47.步骤6、物流车4通过惯性导航从目标泊位2移动至与目标泊位2对应的货位1内,从当前泊位2移动至目标泊位2的过程中,物流车4的局部路径规划采用阿克曼模型的时间弹性带算法;
48.步骤7、物流车4通过二维码识别组件识别目标货位1内的二维码3,得到车体相对二维码的位姿偏差信息,并根据车体相对二维码的位姿偏差信息来矫正物流车4的位姿。
49.本实施例的移动过程:
50.如图2所示,a表示货位1的二维码3,b表示泊位2的二维码3,货位1两侧的塑料箱模拟比物流车4宽6cm的狭窄货位;
51.如图3所示,为激光导航示意图,停靠点1和停靠点2相距20米,中间有障碍物,物流车4右侧的曲线为全局路径规划,物流车4由停靠点1的货位1移动至停靠点2的货位1取/放货;使用前将二维码在泊位和货位内摆正,通过扫描二维码即可得到车体相对二维码的位置偏差信息,即可通过偏差信息对车体进行位置矫正,当车体位置和二维码位置完全一致时,则车体已经摆正。
52.移动过程:首先物流车4通过二维码识别组件识别停靠点1处的货位1上的二维码3,并通过停靠点1货位1的二维码3与车体的位姿偏差信息来矫正物流车4的位姿,随后物流车4根据惯性导航的方式从停靠点1的货位1移动至停靠点1的泊位2内,物流车3通过二维码识别组件识别停靠点1处的泊位2上的二维码3,再通过停靠点1泊位2内的二维码与车体的位姿信偏差息来矫正物流车4的位姿,再利用激光导航(激光slam导航)的方式从停靠点1的泊位2移动至停靠点2的泊位2内,物流车4通过二维码识别组件识别停靠点2处的泊位2上的二维码3,并通过停靠点2泊位上的二维码3与车体的位姿偏差信息来矫正物流车4的位姿,随后物流车4根据惯性导航的方式从停靠点2的泊位2移动至停靠点2的货位1内,物流车3通过二维码识别组件识别停靠点2处的货位1上的二维码3,再通过停靠点2货位1内的二维码与车体的位姿偏差信息来矫正物流车4的位姿;
53.若物流车4从停靠点2的货位1移动至停靠点1的货位1内进行取/放货,则同理。
54.本实施例中,位姿信息包括物流车4在物流区内x轴和y轴的坐标,以及物流车4在水平面内与x轴或y轴的相对角度。
55.由于基于栅格图和amcl的纯定位系统的激光slam导航重复定位精度可以满足
±
5cm以内,所以基本可以保证物流车4可以停在每一个泊位2内,然后通过读码修正位姿后顺利准确进入货位1内。
56.以上所述为本发明最佳实施方式的举例,其中未详细述及的部分均为本领域普通技术人员的公知常识。本发明的保护范围以权利要求的内容为准,任何基于本发明的技术启示而进行的等效变换,也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1