一种紫外差分光谱气体传感器环境压力补偿结构及方法
1.本发明涉及气体检测技术领域,特别是一种紫外差分光谱气体传感器环境压力补偿结构及方法。
背景技术:
2.基于紫外差分光谱气体传感器技术的气体分析仪作为一种快速、准确的气体定量分析技术,特别在煤矿井下气体检测、连续污染物监测(cems)及机动车尾气检测应用中十分普遍。但是传统的光谱分析仪在对气体浓度进行检测时容易受到环境压力的影响,难以消除硬件波动和系统漂移对气体浓度定量分析的影响,另外,当环境压力发生改变时,单位体积内的气体发生改变,即气体的分子间距发生变化,使得紫外线被吸收的能量发生变化,但待测气体的浓度没有变化。因此,测试浓度和真值相比有较大的偏差,当同一地点的压力经常有较大范围变化或传感器的校正地点与使用地点的压力有较大变化时,传感器都需要进行压力校正。现有技术中还未有针对紫外差分光谱气体传感器的压力补偿结构及方法。
技术实现要素:
3.为了解决上述技术问题,本发明的目的在于提供一种紫外差分光谱气体传感器环境压力补偿结构及方法。
4.为实现上述目的,本发明提供如下技术方案:
5.一种紫外差分光谱气体传感器环境压力补偿结构,包括密闭箱体、紫外差分光谱气体传感器、数字压力传感器、恒温控制器、工控机、调压组件和限位隔板;
6.所述密闭箱体为长方体结构,所述密闭箱体内部设有调压组件及限位隔板,所述调压组件包括活塞、调节杆及驱动电机,所述活塞的左侧连接有调节杆,调节杆的前端穿出密闭箱体后与驱动电机相连接,活塞将密闭箱体内部分为调压气室及工作气室,活塞与密闭箱体内壁面之间密封滑动连接,且设置在限位隔板的左侧,限位隔板用于限定活塞位移,在工作气室的上方设有待测气体入口,工作气室的右端设有待测气体出口;
7.在所述工作气室内设有紫外差分光谱气体传感器、数字压力传感器和恒温控制器,所述待测气体入口、待测气体出口分别通过管路与紫外差分光谱气体传感器的气体吸收池连接,紫外差分光谱气体传感器用于检测气体浓度,数字压力传感器用于测定工作气室内部的实时压力,恒温控制器用于控制密闭箱体内温度恒定;所述工控机安装在密闭箱体的外部,与驱动电机、紫外差分光谱气体传感器、数字压力传感器和恒温控制器分别连接,紫外差分光谱气体传感器检测的气体浓度值及数字压力传感器检测的实时压力值传递给工控机,通过工控机控制驱动电机驱动所述调节杆进而带动活塞在密闭箱体内移动,以及通过工控机控制恒温控制器工作。
8.进一步地,所述紫外差分光谱气体传感器为h2s气体传感器或nh3气体传感器。
9.进一步地,所述限位隔板设置2个,对称固定在密闭箱体内壁上。
10.进一步地,所述调节杆与密闭箱体之间密封连接。
11.本发明同时提供一种紫外差分光谱气体传感器环境压力补偿方法,采用上述紫外差分光谱气体传感器环境压力补偿结构实现,包括以下步骤:
12.步骤1、采用上述紫外差分光谱气体传感器环境压力补偿结构,向密闭箱体内通入不同浓度的气体,测得在不同压力ph条件下得到的气体浓度值cb;
13.步骤2、基于步骤1得到的压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值cb与参考标准浓度值的比值k,建立比值k与气压差值参量δp的关系公式模型,通过线性拟合的方法对公式模型相关参数进行确定,拟合公式为:
14.k=a+b*x+c*x2+d*x3+e*x4+f*x5ꢀꢀꢀꢀ
(2)
15.式中k为气压补偿系数;a、b、c、d、e、f分别为拟合参数;x为气压差值参量δp,kpa;
16.步骤3、计算不同压力ph条件下气压补偿后的气体浓度值ca;
17.步骤4、建立环境压力变化引起的测量气体浓度误差δv模型;
18.步骤5、将气体浓度误差值δv与气体浓度的最大允许误差w进行比较,如果δv≤w,完成迭代;如果δv>w,则通过公式(5)计算得到ca',
19.ca'=ca/k
ꢀꢀꢀꢀ
(5)
20.通过公式(6)计算得到δv',
21.δv'=ca'-c0ꢀꢀꢀꢀ
(6)
22.重新判断δv'与w的大小关系,直到满足δv'≤w为止完成迭代,否则重复公式(5)和公式(6)的计算。
23.进一步地,所述紫外差分光谱气体传感器环境压力补偿方法,具体包括以下步骤:
24.步骤1、采用上述紫外差分光谱气体传感器环境压力补偿结构,向密闭箱体内的紫外差分光谱气体传感器通入不同浓度的气体,测得在不同压力ph条件下得到的气体浓度值cb,具体实现步骤包括步骤101和步骤102:
25.步骤101、工控机控制恒温控制器工作,使密闭箱体的达到环境温度t并恒定,恒温控制器保证密闭箱体环境温度变化非常小,可以忽略其对压力的影响;
26.步骤102、由密闭箱体的待测气体入口向紫外差分光谱气体传感器依次通入预设不同浓度的气体,经过紫外差分光谱气体传感器检测完毕后从待测气体出口排出,每次通入气体时,当紫外差分光谱气体传感器测得的气体浓度值达到稳定的气体浓度值时,保持气体持续输入,分别通过改变工作气室的内部压力,模拟环境压力的变化,达到预设压力值时,通过紫外差分光谱气体传感器测定气体浓度达到稳定值,并传递给工控机输出,最终得到压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值cb;
27.步骤2、基于步骤1得到的压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值,建立气体浓度与检测环境气压的关系公式模型,通过线性拟合的方法对公式模型相关参数进行确定,具体实现步骤包括步骤201~步骤203:
28.步骤201、定义气压差值参量δp,其表达式为:
29.δp=p
h-p0ꢀꢀꢀꢀ
(1)
30.式中,ph为不同压力条件的气压值,kpa;p0为紫外差分光谱气体传感器标定时的环境压力值,kpa;
31.步骤202、选取紫外差分光谱气体传感器满量程50%的预设通入的气体浓度值c0作为参考标准浓度值,计算在该参考标准浓度值时,各个气压差值参量δp下紫外差分光谱
气体传感器在不同压力ph条件下测定气体浓度值cb与参考标准浓度值的比值k,然后采用5阶多项式拟合出比值k和气压差值参量δp的变化关系,拟合公式为:
32.k=a+b*x+c*x2+d*x3+e*x4+f*x5ꢀꢀꢀꢀ
(2)
33.式中k为气压补偿系数;a、b、c、d、e、f分别为拟合参数;x为气压差值参量δp,kpa;
34.步骤203、将公式(1)得到的各个δp作为x代入公式(2)中,可以得到拟合后对应各个气压差值参量δp的气压补偿系数值k';
35.步骤3、通过公式(3)计算不同压力ph条件下气压补偿后的气体浓度值ca,
36.ca=cb/k'
ꢀꢀꢀꢀ
(3)
37.式中,cb为压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值,ppm;k'为拟合后对应各个气压差值参量δp的气压补偿系数值;
38.步骤4、建立环境压力变化引起的测量气体浓度误差模型如下:
39.δv=c
a-c0ꢀꢀꢀꢀ
(4)
40.式(4)中:δv为气体浓度误差值,ppm,c0为预设通入的气体浓度值,ppm;
41.步骤5、将气体浓度误差值δv与气体浓度的最大允许误差w进行比较,如果δv≤w,完成迭代;如果δv>w,则通过公式(5)计算得到ca',
42.ca'=ca/k
ꢀꢀꢀꢀ
(5)
43.通过公式(6)计算得到δv',
44.δv'=ca'-c0ꢀꢀꢀꢀ
(6)
45.重新判断δv'与w的大小关系,直到满足δv'≤w为止完成迭代,否则重复公式(5)和公式(6)的计算。
46.进一步地,所述步骤101中温度t为25℃。
47.进一步地,所述步骤102中压力分别为80kpa、85kpa、90kpa、95kpa,100kpa、105kpa、110kpa、115kpa、120kpa。
48.进一步地,所述步骤102中改变工作气室的内部压力具体方法为:
49.利用工控机控制驱动电机驱动所述调节杆进而带动活塞在密闭箱体内移动,进而改变调压气室与工作气室内部的体积,使工作气室内的压力得到预定压力值;调压气室的体积变小,工作气室的体积即变大,工作气室的内部压力减小;调压气室的体积变大,工作气室的体积即变小,工作气室的内部压力增大;经过数字压力传感器实时显示工作气室内部压力,并反馈到工控机中。
50.与现有技术相比,本发明的有益效果如下:
51.本发明通过改变密闭环境内部体积模拟外界环境压力变化,从而揭示了环境压力对传感器测试精度的影响,本发明基于不同压力ph条件下气体传感器获得的不同气体浓度实测数据,建立气体浓度与检测环境气压的关系公式模型,通过线性拟合的方法对公式模型相关参数进行确定,从而得出两者间准确的数学关系,并将其应用在气体浓度实测数据的后期处理中,降低气体传感器实际检测时因检测环境气压波动引起的非线性误差。本发明的补偿结构及方法能够对不同环境压力条件下的气体浓度进行补偿,克服了由于环境压力条件变化导致气体传感器测量气体浓度不精确的缺陷,为工业环境气体浓度测量提供理论基础。
附图说明
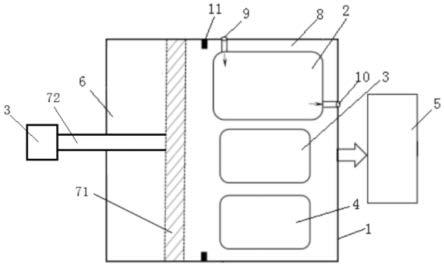
52.图1为本发明的紫外差分光谱气体传感器环境压力补偿结构示意图;
53.图2为本发明实施例3中的h2s的k值5阶多项式拟合曲线示意图;
54.图3为本发明实施例4中的nh3的k值5阶多项式拟合曲线示意图;
55.图中:1-密闭箱体;2-紫外差分光谱气体传感器;3-数字压力传感器;4-恒温控制器;5-工控机;6-调压气室;71-活塞;72-调节杆;73-驱动电机;8-工作气室;9-待测气体入口;10-待测气体出口;11-限位隔板。
具体实施方式
56.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
57.实施例1
58.参照图1,一种紫外差分光谱气体传感器环境压力补偿结构,包括密闭箱体1、紫外差分光谱气体传感器2、数字压力传感器3、恒温控制器4、工控机5、调压组件及限位隔板11;
59.所述密闭箱体1为长方体结构,所述密闭箱体1内部设有调压组件及限位隔板11,所述调压组件包括活塞71、调节杆72及驱动电机73,所述活塞71的左侧连接有调节杆72,调节杆72的前端穿出密闭箱体1后与驱动电机73相连接,活塞71将密闭箱体1内部分为调压气室6及工作气室8,活塞7与密闭箱体1内壁面之间密封滑动连接,且设置在限位隔板11的左侧,限位隔板11用于限定活塞7位移,在工作气室8的上方设有待测气体入口9,工作气室8的右端设有待测气体出口10;
60.在所述工作气室8内设有紫外差分光谱气体传感器2、数字压力传感器3和恒温控制器4,所述待测气体入口9、待测气体出口10分别通过管路与紫外差分光谱气体传感器2的气体吸收池相连接,紫外差分光谱气体传感器2用于检测气体浓度,数字压力传感器3用于测定工作气室8内部的实时压力,恒温控制器4用于控制密闭箱体1内温度恒定;所述工控机5安装在密闭箱体1的外部,与驱动电机73、紫外差分光谱气体传感器2、数字压力传感器3和恒温控制器4分别连接,紫外差分光谱气体传感器2检测的气体浓度值及数字压力传感器3检测的实时压力值传递给工控机5,通过工控机5控制驱动电机73驱动所述调节杆72进而带动活塞71在密闭箱体1内移动,以及通过工控机5控制恒温控制器4工作。
61.所述限位隔板11设置2个,对称固定在密闭箱体1内壁上。
62.所述调节杆72与密闭箱体1之间密封连接。
63.所述紫外差分光谱气体传感器2为h2s气体传感器。
64.实施例2
65.与实施例1不同之处在于:所述紫外差分光谱气体传感器2为nh3气体传感器。
66.实施例3
67.一种紫外差分光谱气体传感器环境压力补偿方法,通过实施例1中的紫外差分光谱气体传感器环境压力补偿结构实现,包括以下步骤:
68.步骤1、采用上述紫外差分光谱气体传感器环境压力补偿结构,向密闭箱体1内通
入不同浓度的h2s气体,测得在不同压力的条件(压力ph分别为80kpa、85kpa、90kpa、95kpa、100kpa、105kpa、110kpa、115kpa、120kpa)下得到的气体浓度:
69.步骤101、工控机5控制恒温控制器4工作,使密闭箱体1的达到环境温度t并恒定,温度t设置为25℃,恒温控制器4保证密闭箱体1环境温度变化非常小,可以忽略其对压力的影响;
70.步骤102、由密闭箱体1的待测气体入口9向紫外差分光谱气体传感器2依次通入预设不同浓度的h2s气体(本实施例中由于h2s气体传感器的量程为1000ppm,故而预设通入的h2s气体浓度值c0分别为0ppm、250ppm、375ppm、500ppm、625ppm、750ppm、1000ppm),气体经过紫外差分光谱气体传感器2检测完毕后从待测气体出口10排出,每次通入气体时,当紫外差分光谱气体传感器2测得的气体浓度值达到稳定值时,保持气体持续输入,分别通过改变工作气室8的内部压力,模拟环境压力的变化,达到预设压力值时,通过紫外差分光谱气体传感器2测定气体浓度达到稳定值,并传递给工控机5输出,最终得到压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值cb,如表1所示;
71.所述步骤102中改变工作气室8的内部压力具体方法为:
72.利用工控机5控制驱动电机73驱动所述调节杆72进而带动活塞71在密闭箱体1内移动,进而改变调压气室6与工作气室8内部的体积,使工作气室8内的压力得到预定压力值,可以模拟外部环境压力变化;调压气室6的体积变小,工作气室8的体积即变大,工作气室8的内部压力减小;调压气室6的体积变大,工作气室8的体积即变小,工作气室8的内部压力增大;经过数字压力传感器3实时显示工作气室8内部压力,并反馈到工控机5系统程序中;
73.表1 h2s气体传感器在不同压力ph条件下、通入各预设气体浓度值c0的h2s气体测定的气体浓度值cb[0074][0075]
步骤2、基于步骤1得到的压力补偿前不同浓度的气体在不同压力条件ph下的气体浓度值与参考标准浓度值的比值k,建立比值k与检测环境气压差值参量δp的关系公式模型,通过线性拟合的方法对公式模型相关参数进行确定,从而得出两者间准确的数学关系,并将其应用在气体浓度实测数据的后期处理中,降低本气体传感器实际检测时因检测环境气压波动引起的非线性误差,具体包括以下步骤:
[0076]
步骤201、定义气压差值参量δp,其表达式为:
[0077]
δp=p
h-p0ꢀꢀꢀꢀ
(1)
[0078]
式中,ph为不同压力条件的气压值,kpa;p0为紫外差分光谱气体传感器标定时的环境压力值,kpa,本实施例中p0=100kpa;
[0079]
步骤202、选取紫外差分光谱气体传感器满量程50%的预设通入的气体浓度值c0作为参考标准浓度值,计算在该参考标准浓度值时,各个气压差值参量δp下紫外差分光谱气体传感器2在不同压力ph条件下测定气体浓度值cb与参考标准浓度值的比值k,然后采用5阶多项式拟合出比值k和气压差值参量δp的变化关系;
[0080]
本实施例选取c0=500ppm作为参考标准浓度值,计算在该参考标准浓度值时,各个气压差值参量δp下紫外差分光谱气体传感器2在不同压力ph条件下测定气体浓度值cb与参考标准浓度值c0=500ppm的比值k,气压差值参量δp与比值k如表2所示;
[0081]
表2 c0=500ppm时各气压差值参量δp与比值k
[0082]
δp/kpa-20-15-10-505101520k1.281.241.070.931.11.161.251.321.41
[0083]
相较于低阶多项式拟合,5阶多项式具有更高的线性拟合度,而相较于更高阶的线
性拟合,虽然拟合度可以进一步提高,然而提高的不明显,且导致引入参数会更多,故而选用5阶多项式拟合。该多项式用字母k表示。将表2中的数据使用多项式拟合,经过反复测试,选取拟合度最高的5阶多项式,拟合度高达0.89537。拟合公式为:
[0084]
k=a+b*x+c*x2+d*x3+e*x4+f*x5ꢀꢀꢀꢀ
(2)
[0085]
式中k为气压补偿系数;a、b、c、d、e、f分别为拟合参数,x为气压差值参量δp,kpa;本实施例的拟合曲线参照图2,a=1.04614,b=0.02316,c=0.00132,d=-0.000148645;e=-0.00000142494,f=0.000000247309;
[0086]
步骤203、将公式(1)得到的各个δp作为x代入公式(2)中,可以得到拟合后对应各个气压差值参量δp的气压补偿系数值k',如表3所示;
[0087]
表3拟合后对应各个气压差值参量δp的气压补偿系数值k'
[0088]
δp/kpa-20-15-10-505101520k'1.2811.2371.0560.981.0461.1761.2721.3051.412
[0089]
步骤3、通过公式(3)计算不同压力ph条件下气压补偿后的气体浓度值ca,如表4所示;
[0090]
ca=cb/k'
ꢀꢀꢀꢀ
(3)
[0091]
cb为表1中压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值,ppm;k'为拟合后对应各个气压差值参量δp的气压补偿系数值;
[0092]
表4不同压力ph条件下气压补偿后的气体浓度值ca[0093][0094]
步骤4、建立环境压力变化引起的测量气体浓度误差δv模型如下:
[0095]
δv=c
a-c0ꢀꢀꢀꢀ
(4)
[0096]
式(4)中:δv为气体浓度误差值,ppm;c0为预设通入的气体浓度值,ppm;
[0097]
步骤5、将气体浓度误差值与气体浓度的最大允许误差w进行比较,如果δv≤w,完成迭代;如果δv>w,则通过公式(5)计算得到ca',
[0098]
ca'=ca/k
ꢀꢀꢀꢀ
(5)
[0099]
通过公式(6)计算得到δv',
[0100]
δv'=ca'-c0ꢀꢀꢀꢀ
(6)
[0101]
重新判断δv'与w的大小关系,直到满足δv'≤w为止完成迭代,否则重复公式(5)和公式(6)的计算。
[0102]
由于环境压力有正偏差和负偏差之分,所以δv有正负之分,在迭代计算过程中如果发现偏差变大时,需要终止迭代,微调定标基准,重新补偿,直至达到基本要求。
[0103]
实施例4
[0104]
一种紫外差分光谱气体传感器环境压力补偿方法,通过实施例2中的紫外差分光谱气体传感器环境压力补偿结构实现,包括以下步骤:
[0105]
步骤1、采用上述紫外差分光谱气体传感器环境压力补偿结构,向密闭箱体1内的紫外差分光谱气体传感器2通入不同浓度的nh3气体,测得在不同压力ph条件(压力ph分别为80kpa、85kpa、90kpa、95kpa、100kpa、105kpa、110kpa、115kpa、120kpa)下得到的气体浓度:
[0106]
步骤101、工控机5控制恒温控制器4工作,使密闭箱体1的达到环境温度t并恒定,温度t设置为25℃,恒温控制器4保证密闭箱体1环境温度变化非常小,可以忽略其对压力的影响;
[0107]
步骤102、由密闭箱体1的待测气体入口9向紫外差分光谱气体传感器2依次通入预设不同浓度的nh3气体(本实施例中由于nh3气体传感器的量程为50ppm,故而预设通入的nh3气体浓度值c0分别为0ppm、12.5ppm、18.75ppm、25ppm、31.25ppm、37.5ppm、50ppm),气体经过紫外差分光谱气体传感器2检测完毕后从待测气体出口10排出,每次通入气体时,当紫外差分光谱气体传感器2测得的气体浓度值达到稳定值时,保持气体持续输入,分别通过改变工作气室8的内部压力,模拟环境压力的变化,达到预设压力值时,通过紫外差分光谱气体传感器2测定气体浓度达到稳定值,并传递给工控机5输出,最终得到压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值cb,如表5所示;
[0108]
所述步骤102中改变工作气室8的内部压力具体方法为:
[0109]
利用工控机5控制驱动电机73驱动所述调节杆72进而带动活塞71在密闭箱体1内移动,进而改变调压气室6与工作气室8内部的体积,使工作气室8内的压力得到预定压力值,可以模拟外部环境压力变化;调压气室6的体积变小,工作气室8的体积即变大,工作气室8的内部压力减小;调压气室6的体积变大,工作气室8的体积即变小,工作气室8的内部压力增大;经过数字压力传感器3实时显示工作气室8内部压力,并反馈到工控机5系统程序中。
[0110]
表5 nh3气体传感器在不同压力ph条件下、通入各预设气体浓度值c0的nh3气体测定的气体浓度值cb[0111][0112]
步骤2、基于步骤1得到的压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值cb,建立不同压力ph条件下测定气体浓度值cb与参考标准浓度值的比值k与检测环境气压差值参量δp的关系公式模型,通过线性拟合的方法对公式模型相关参数进行确定,从而得出两者间准确的数学关系,并将其应用在气体浓度实测数据的后期处理中,降低本气体传感器实际检测时因检测环境气压波动引起的非线性误差,具体包括以下步骤:
[0113]
步骤201、定义气压差值参量δp,其表达式为:
[0114]
δp=p
h-p0ꢀꢀꢀꢀ
(1)
[0115]
式中,ph为不同压力条件的气压值,kpa;p0为紫外差分光谱气体传感器标定时的环境压力值,kpa,本实施例中p0=100kpa;
[0116]
步骤202、选取紫外差分光谱气体传感器2满量程50%的预设通入的气体浓度值c0作为参考标准浓度值,计算在该参考标准浓度值时,各个气压差值参量δp下紫外差分光谱气体传感器2在不同压力ph条件下测定气体浓度值cb与参考标准浓度值的比值k,然后采用5阶多项式拟合出比值k和气压差值参量δp的变化关系;
[0117]
本实施例选取c0=25ppm作为参考标准浓度值,计算在该参考标准浓度值时,各个气压差值参量δp下紫外差分光谱气体传感器2在不同压力ph条件下测定气体浓度值cb与参考标准浓度值c0=25ppm的比值k,气压差值参量δp与比值k如表6所示;
[0118]
表6 c0=25ppm时各气压差值参量δp与比值k
[0119]
δp/kpa-20-15-10-505101520k1.111.070.930.810.951.011.081.151.22
[0120]
相较于低阶多项式拟合,5阶多项式具有更高的线性拟合度,而相较于更高阶的线
性拟合,虽然拟合度可以进一步提高,然而提高的不明显,且导致引入参数会更多,故而选用5阶多项式拟合。该多项式用字母k表示。将表2中的数据使用多项式拟合,经过反复测试,选取拟合度最高的5阶多项式,拟合度高达0.89537。拟合公式为:
[0121]
k=a+b*x+c*x2+d*x3+e*x4+f*x5ꢀꢀꢀꢀ
(2)
[0122]
参照图3,式中k为气压补偿系数;a、b、c、d、e、f分别为拟合参数,a=0.90575,b=0.02005,c=0.00115,d=-0.000128697;e=-0.00000123371,f=0.0000002142;
[0123]
步骤203、将公式(1)得到的各个δp作为x代入公式(2)中,可以得到拟合后对应各个气压差值参量δp的气压补偿系数值k',如表7所示;
[0124]
表7拟合后对应各个气压差值参量δp的气压补偿系数值k'
[0125]
δp/kpa-20-15-10-505101520k'1.1121.0730.9150.8490.9061.0191.1021.1311.225
[0126]
步骤3、通过公式(3)计算不同压力ph条件下气压补偿后的气体浓度值ca,如表8所示;
[0127]
ca=cb/k'
ꢀꢀꢀꢀ
(3)
[0128]
式中,cb为表5中压力补偿前不同浓度的气体在不同压力ph条件下的气体浓度值,ppm;k'为拟合后对应各个气压差值参量δp的气压补偿系数值;
[0129]
表8不同压力ph条件下气压补偿后的气体浓度值ca[0130][0131]
步骤4、建立环境压力变化引起的测量气体浓度误差δv模型如下:
[0132]
δv=c
a-c0ꢀꢀꢀꢀ
(4)
[0133]
式(4)中:δv为气体浓度误差值,ppm,c0为预设通入的气体浓度值,ppm;
[0134]
步骤5、将气体浓度误差值与气体浓度的最大允许误差w进行比较,如果δv≤w,完成迭代;如果δv>w,则通过公式(5)计算得到ca',
[0135]
ca'=ca/k
ꢀꢀꢀꢀ
(5)
[0136]
通过公式(6)计算得到δv',
[0137]
δv'=ca'-c0ꢀꢀꢀꢀ
(6)
[0138]
重新判断δv'与w的大小关系,直到满足δv'≤w为止完成迭代,否则重复公式(5)和公式(6)的计算。
[0139]
由于环境压力有正偏差和负偏差之分,所以δv有正负之分,在迭代计算过程中如果发现偏差变大时,需要终止迭代,微调定标基准,重新补偿,直至达到基本要求。
[0140]
本发明基于不同环境压力下获得了紫外差分光谱气体传感器浓度实测数据,建立不同压力ph条件下测定气体浓度值cb与参考标准浓度值的比值k与检测环境气压差值参量δp的关系公式模型,通过线性拟合方法确定了模型相关参数。同时,选取紫外差分光谱气体传感器标定时的环境压力(检测环境气压)100kpa、满量程50%气体浓度值c0作为气压补偿的参考基准,开展了不同环境压力条件下气体的浓度补偿,修正了环境压力变化引起紫外差分光谱气体传感器浓度测值的偏移量,使得传感器测试精度朝着标准气体浓度值收敛,进而达到压力补偿的效果。本发明实施例中给出了h2s和nh3两种紫外差分光谱气体传感器的压力补偿,在实际应用中,可采用本发明对其他气体传感器进行同样的补偿,在此不再赘述。
[0141]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1