一种机器人地图的转换方法与流程
本发明属于地图操作的,具体涉及基于机器人的当前地图和历史地图的转换方法。
背景技术:
1、由所属技术领域的普通技术人员可知,对于用于室内导航定位的清洁机器人所构建的地图中,历史地图最能归类为执行地图保存功能的主要地图载体,清洁机器人每次遍历房间时都将周围环境的特征都保存起来,并以坐标系的形式进行标记,构建起地图,并能够保存为历史地图,则清洁机器人下次清扫可预先把该历史地图显示到用户终端的显示界面上。由于地图显示或坐标转换的不稳定性,清洁机器人再次遍历同一环境区域时,会将预先构建的历史地图内的部分区域轮廓线、地形走向显示得不规则,比如,会将实际环境内长走廊、墙体或具有较长的平坦轮廓面的障碍物显示成由多段弯折线连接形成,地图整体上显示得比较歪(相对于坐标轴有所倾斜),显示效果不稳定,容易出现地图偏移误差,导致地图内显示的可移动的设备相对于其所在的地图呈静止状态,也有可能机器人上装配的视觉传感器在相邻两次不能采集到完全保持相同的位姿,从而导致读取的预先构建的历史地图所指示的方向与机器人当前前进方向不对应。
技术实现思路
1、针对机器人地图描述环境特征不稳定且易倾斜的问题,本发明公开一种机器人地图的转换方法,无论机器人是否被抱起,该转换方法让当前地图保持适配历史地图,进而机器人的当前位置在相应阶段显示的地图内保持运动状态;具体的技术方案如下:
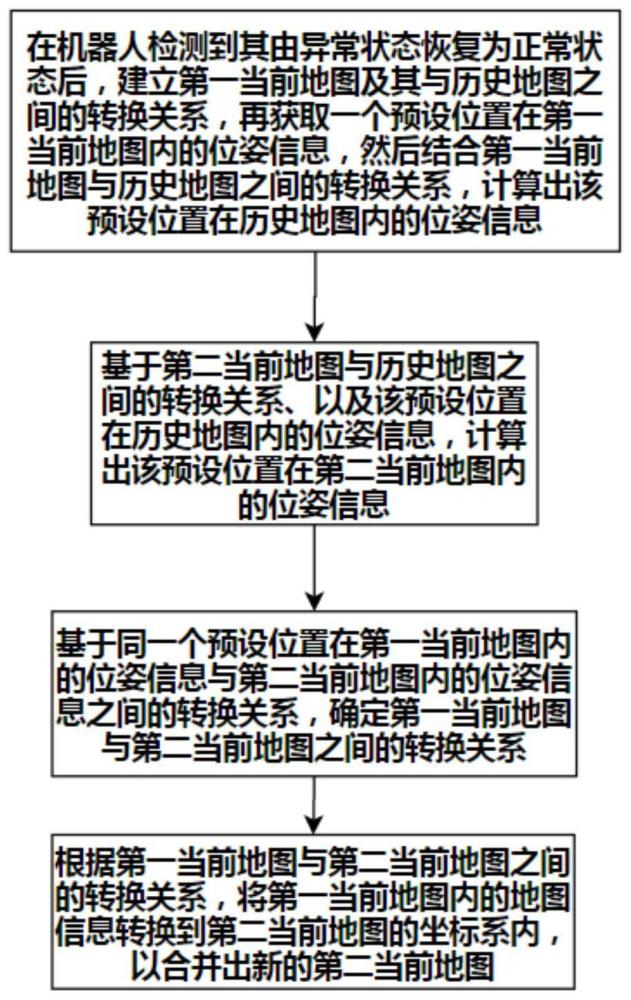
2、一种机器人地图的转换方法,所述转换方法包括:在机器人检测到其由异常状态恢复为正常状态后,建立第一当前地图及其与历史地图之间的转换关系,再获取一个预设位置在第一当前地图内的位姿信息,然后结合第一当前地图与历史地图之间的转换关系,计算出该预设位置在历史地图内的位姿信息;然后基于第二当前地图与历史地图之间的转换关系、以及该预设位置在历史地图内的位姿信息,计算出该预设位置在第二当前地图内的位姿信息;然后基于同一个预设位置在第一当前地图内的位姿信息与第二当前地图内的位姿信息之间的转换关系,确定第一当前地图与第二当前地图之间的转换关系;然后根据第一当前地图与第二当前地图之间的转换关系,将第一当前地图内的地图信息转换到第二当前地图的坐标系内,以合并出新的第二当前地图。
3、进一步地,机器人将其进入异常状态之前最新构建的地图进行原点预处理,获得第二当前地图、以及第二当前地图与历史地图之间的转换关系;在机器人检测到处于异常状态时将该第二当前地图和历史地图都标记为无效地图;机器人将第一当前地图内的地图信息转换到第二当前地图的坐标系内后,获得新的第二当前地图,再将新的第二当前地图标记为有效地图,再利用第二当前地图与历史地图之间的转换关系,将新的第二当前地图内的地图信息转换到历史地图的坐标系内;其中,机器人将所述历史地图配置为在构建出第二当前地图之前已经保存好的地图,且支持第二当前地图或第一当前地图在不标记为无效地图的前提下更新为所述历史地图,并用于表示同一个预设位置及机器人所处的环境区域。
4、进一步地,在机器人检测到先进入异常状态再恢复为正常状态的情况下,机器人建立第一当前地图并确定该第一当前地图与历史地图之间的转换关系,若机器人检测到再次进入异常状态,则将该第一当前地图更新为第二当前地图,再对第二当前地图与历史地图之间的转换关系进行更新、或删除该第二当前地图与历史地图之间的转换关系;机器人还将该第二当前地图和历史地图都标记为无效地图,但将第二当前地图与历史地图之间的转换关系标记为有效信息以便机器人后续调用。
5、进一步地,在机器人检测到先进入异常状态再恢复为正常状态的情况下,若机器人没有检测到再次进入异常状态,则机器人在行走过程中将历史地图标记为有效地图,并控制所述第一当前地图与历史地图之间的转换关系不变;然后在获取一个预设位置在第一当前地图内的位姿信息的基础上,结合第一当前地图与历史地图之间的转换关系,计算出该预设位置在历史地图内的位姿信息,再基于机器人的当前位置与该预设位置的相对位置关系计算出机器人的当前位置在该历史地图内的位姿信息;其中,机器人的当前位置与该预设位置的相对位置关系是预先获得。
6、进一步地,机器人每次进入异常状态之前,机器人不将所述第二当前地图或所述第一当前地图更新为历史地图;其中,机器人在检测到每次进入异常状态时,将该次进入异常状态之前最新构建的地图标记为第二当前地图;在机器人检测到其第一次进入异常状态时,将第二当前地图与历史地图之间的转换关系标记为第一初始转换关系;机器人检测到其再次进入异常状态时,对所述第一当前地图与历史地图之间的转换关系进行删除;在机器人上一次由异常状态恢复正常状态后获得所述预设位置在第二当前地图内的位姿信息的前提下,对第二当前地图与历史地图之间的转换关系进行更新,再将该更新后的转换关系标记为第一参考转换关系;在机器人上一次由异常状态恢复正常状态后无法获得所述预设位置在第二当前地图内的位姿信息的前提下,直接将所述第一初始转换关系标记为第一参考转换关系;当机器人检测到由当前所处的异常状态恢复为正常状态时,重新建立所述第一当前地图与历史地图之间的转换关系并将当前建立的转换关系标记为第二参考转换关系;然后机器人使用第二参考转换关系计算出所述预设位置在历史地图内的位姿信息,再使用第一参考转换关系计算出所述预设位置在第二当前地图内的位姿信息。
7、进一步地,所述根据第一当前地图与第二当前地图之间的转换关系,将第一当前地图内的地图信息转换到第二当前地图的坐标系内的方法包括:在机器人检测到其由异常状态恢复为正常状态时,根据第一当前地图的地图坐标系与最新被标记为无效地图的第二当前地图的地图坐标系之间的转换关系,将机器人的当前位置在第一当前地图内的位姿信息以及第一当前地图内所有的路标的位姿信息转换到该最新被标记为无效地图的第二当前地图的坐标系内,再确定该第一当前地图与该第二当前地图合并成为新的第二当前地图,并将该新的第二当前地图标记为有效地图。
8、进一步地,在机器人将第一当前地图内的地图信息转换到第二当前地图的坐标系内并确定该第一当前地图与该第二当前地图合并成为新的第二当前地图之后,基于第二当前地图与历史地图之间的转换关系,将机器人的当前位置在该新的第二当前地图内的位姿信息以及该新的第二当前地图内所有路标的位姿信息转换到最新被标记为无效地图的历史地图的坐标系内,再确定该新的第二当前地图与该历史地图合并成为新的历史地图,并将合并出的新的历史地图显示到终端界面上。
9、进一步地,所述原点预处理包括:机器人将其进入异常状态之前最新构建的地图标记为旧当前地图,再根据旧当前地图的地图坐标系与所述历史地图的地图坐标系之间的位置关系和/或历史地图的状态,设置原点和坐标轴,建立起第二当前地图的地图坐标系并形成第二当前地图与所述历史地图之间的转换关系,再按照第二当前地图与旧当前地图之间的转换关系将旧当前地图内的地图信息转换到第二当前地图的坐标系内,形成第二当前地图;其中,所述第一当前地图与历史地图之间的转换关系、以及所述旧当前地图与历史地图之间的转换关系都是机器人通过执行预先设置的视觉定位算法来获得,以使得机器人都使用地图坐标系之间的转换关系来表示两个地图之间的转换关系;其中,第二当前地图与旧当前地图之间的转换关系是表示为第二当前地图的地图坐标系与旧当前地图的地图坐标系之间的转换关系。
10、进一步地,机器人将所述历史地图、旧当前地图、所述第一当前地图和所述第二当前地图设置为都存在用于标记同一个所述预设位置的路标,以区分出路标所属的地图及路标在所属地图内的位姿信息;机器人将同一个预设位置在两个地图内的位姿信息之间的转换关系配置为:等同于该两个地图之间的转换关系;机器人使用旋转矩阵和平移向量组成两个地图坐标系之间转换关系式,以使得其中一个地图坐标系通过旋转和平移形成另一个地图坐标系。
11、进一步地,所述原点预处理包括包括:机器人处于正常状态且历史地图的地图坐标系的一个坐标轴是配置为与机器人所处环境的墙体轮廓平行或垂直的情况下,当历史地图的地图坐标系的预设坐标轴与旧当前地图的地图坐标系的预设坐标轴不平行且不垂直时,机器人将其当前位置在历史地图内的坐标更新为旧当前地图的地图坐标系的原点的坐标,再将更新好原点的旧当前地图的地图坐标系的预设坐标轴转动至与机器人所处环境的墙体轮廓平行或垂直,再将预设坐标轴转动后的旧当前地图的地图坐标系更新为第二当前地图的地图坐标系。
12、进一步地,所述原点预处理包括:机器人处于正常状态时,当历史地图的地图坐标系的预设坐标轴与旧当前地图的地图坐标系的预设坐标轴平行或垂直时,机器人将其当前位置在旧当前地图内的坐标更新为旧当前地图的地图坐标系的原点的坐标,再将更新好原点的旧当前地图的地图坐标系的预设坐标轴保持与历史地图的地图坐标系的预设坐标轴平行或垂直,再将更新好原点的旧当前地图的地图坐标系更新为第二当前地图的地图坐标系。
13、进一步地,所述原点预处理包括:在机器人将旧当前地图更新为历史地图时,机器人将其当前位置在该旧当前地图内的坐标更新为旧当前地图的地图坐标系的原点的坐标,再将更新好原点的旧当前地图的地图坐标系更新为第二当前地图的地图坐标系。
14、进一步地,所述原点预处理包括:在机器人没有将所述旧当前地图没有更新为历史地图,且机器人已经将当前存在的历史地图标记为无效地图时,通过在旧当前地图内搜索目标直线的方式来调节出第二当前地图的地图坐标系的对应坐标轴的朝向,以使该坐标轴的朝向与所搜索的目标直线平行或垂直;再将调节出的第二当前地图的地图坐标系与历史地图的地图坐标系之间的转换关系设置为所述第二当前地图与所述历史地图之间的转换关系。
15、进一步地,机器人将所述目标直线设置为由所述旧当前地图内存在的多个离散点拟合出来的直线;其中,该目标直线用于表示与预先识别出的墙体轮廓平行或垂直的拟合直线;然后,机器人将所述旧当前地图的地图坐标系的对应坐标轴的朝向转动至与目标直线平行或垂直,再控制转动后的旧当前地图的地图坐标系的原点不变,再将转动后的旧当前地图的地图坐标系更新为所述第二当前地图的地图坐标系。
16、进一步地,机器人的驱动轮离开行走平面时,进入所述异常状态;机器人的驱动轮与行走平面接触以启动行走时,进入所述正常状态;机器人的底部装配探测传感器,机器人控制该探测传感器发出探测信号射向机器人的行走平面;在该探测传感器接收到行走平面反射回的信号后,若机器人检测到该信号反馈出的机器人底部与行走平面的相对高度高于预设高度阈值,则机器人确定其驱动轮离开行走平面并进入所述异常状态;若机器人检测到该信号反馈出的机器人底部与行走平面的相对高度地域低于或等于预设高度阈值,则机器人确定其驱动轮接触地面并进入所述正常状态以启动行走。
17、本发明的有益技术效果在于:本发明具体能够应用于机器人没被抱起、机器人被抱起前、被抱起后被放回地面、以及再次被抱起等当前地图容易出现异常无效的情况,设计机器人被抱起前所构建的第二当前地图、以及被抱起后被放回地面所构建的第一当前地图;然后可以根据各种抱起情况处理第二当前地图与历史地图之间的转换关系,使得第二当前地图与历史地图之间的转换关系能够在定位回被标记为无效地图的当前地图的前提下直接恢复因为机器人抱起而被标记为无效地图的历史地图。其中,机器人被抱起后被放回地面后重新开始运动,但第二当前地图(机器人被抱起前所建立的当前地图及历史地图军均被标记为无效地图),此时需要建新的当前地图;同时依靠视觉或者激光,重新定位回历史地图并获得一个物理位置在历史地图的坐标,再基于预先获得的预设标准地图转换关系,求出该物理位置在第二当前地图内的坐标;然后利用同一个物理位置在抱起前后的两个不同地图上的坐标得到第一当前地图与第二当前地图之间的转换关系,以定位回被标记为无效地图的第二当前地图,在此基础上能以预先获得的预设标准地图转换关系将新定位回的第二当前地图转换回同样被标记为无效地图的历史地图,并显示到用户终端界面上,让用户终端界面上的历史地图不动,至少机器人每次工作或重新遍历同一区域时历史地图尽量不出现较大的旋转和平移,进而保证用户看到机器人一直在历史地图上运动,即保证历史地图稳定(不能倾斜)一旦出现就减少偏移、或变歪,使得历史地图就与实际的物理环境相匹配,且当前地图也适配历史地图。
18、至于地图之间的转换关系,机器人开始行走与开始建图的初始阶段,根据历史地图与当前地图的位置关系以及历史地图的有效性,设置当前地图的原点并对当前地图的地图坐标系与历史地图的地图坐标系之间的转换关系进行更新调整,完成原点预处理,获得第二当前地图与历史地图之间的转换关系,以使得当前地图与历史地图的转换关系依据机器人的当前位置进行适应性调整,并让当前地图较为全面地覆盖到机器人当前所处区域环境,且将地形轮廓线(比如墙体、长廊)表示为与坐标轴垂直或平行;然后将当前地图与历史地图的转换关系保存下来作为重定位回机器人被抱起前的建立的当前地图的转换关系信息;同时,当前地图与历史地图的转换关系也在适用于机器人被抱起后又被放下的情况下,形成恢复机器人的历史地图的转换关系信息。则机器人在被抱起和放下的状态下让地图不因机器人的重新启动行走而出现较大的旋转平移,至少基于地图坐标系的原点的设置方式而将地图的变化转换回已经保存的历史地图的地图坐标系上,处于可控的范围内。
19、综上,机器人会记住该区域内的地图平面坐标系的布局方式,并学会了如何调整转换所述用户端中显示的历史地图,可以保持机器人历史地图的有效性,即控制所述机器人分别依靠抱起前后的当前地图之间转换关系、历史地图分别与抱起前后的当前地图之间的转换关系,在多种状态场景下获取工作区域的环境特征及地图表示形式,使得所述视觉机器人对地图有了自主调整能力,即对周围环境的地图表示形式及不同时间产生的地图之间的转换有了学习能力,进而构建显示更为平直的导航地图,增加地图的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!