磁层顶三维非对称磁重联地面模拟真空舱及真空装置
1.涉及空间环境模拟技术领域,具体涉及空间环境中的空间等离子体的模拟技术。
背景技术:
2.空间等离子体是空间环境的重要组成部分,是影响航天器可靠运行最重要的环境因素之一。对空间等离子体环境的认知在空间科学和航天领域始终受到广泛关注。磁重联是空间等离子体环境中普遍存在的物理现象。
3.目前,对空间等离子体基本物理过程的研究普遍依赖于卫星的单点或者少数点观测,而无法反映物理过程的发展全貌和时间演化,因此,有必要针对特定的物理过程设计一种地面实验装置,利用地面实验的可控性、可重复性和多点同时测量的优点,全面的模拟研究空间等离子体环境中发生的基本物理过程。目前,世界上已有多个实验研究装置对空间等离子体中的磁重联过程进行了实验室模拟研究,并取得了一些突破性的进展。
4.申请号为202210859406.x的专利申请文件中记载了同轴对称强脉冲四线圈组支撑装置及同轴对称强脉冲四线圈组,不过其并没有记载实验研究装置相关的技术方案。
5.根据现有公开报道,用于磁重联研究的实验装置通常采用简化的具有对称性的磁场位形和等离子体分布,无法真实反映地球磁层顶三维磁重联的非对称结构特征。随着对空间磁层顶磁重联地面实验需求的不断增加,能够反映磁层顶三维非对称磁重联磁场位形的实验装置成为地面实验研究的必不可少的条件之一。
技术实现要素:
6.为解决现有技术中存在的,用于磁重联研究的实验装置通常采用简化的具有对称性的磁场位形和等离子体分布,无法真实反映地球磁层顶三维磁重联的非对称结构特征的问题,本发明提供的技术方案为:
7.磁层顶三维非对称磁重联地面模拟真空舱,所述真空舱包括:舱体、磁体线圈系统和磁体线圈支撑系统;
8.所述的舱体包括:多个通孔,所述多个通孔分别用于作为进气孔、抽气孔、等离子体源孔、冷却系统穿舱孔、等离子体参数诊断孔和磁场诊断孔;
9.所述磁体线圈系统包括地磁场线圈组和磁鞘线圈组,所述地磁场线圈组通过所述磁体线圈支撑系统固定在所述真空舱内部底面,所述磁鞘线圈组穿过所述真空舱的底面并固定。
10.进一步,提供一种优选实施例,所述磁鞘线圈组设置在所述真空舱内部靠近侧壁的位置、包括四个线圈,所述四个线圈轴线重合,沿所述真空舱高度方向设置;所述地磁场线圈组设置在所述真空舱内部底面中间位置、包括一个线圈,所述线圈与所述真空舱底面平行。
11.进一步,提供一种优选实施例,所述真空舱还包括:激励系统,所述激励系统用于激励所述地磁场线圈和磁鞘线圈。
12.进一步,提供一种优选实施例,所述真空舱还包括:支撑架,所述支撑架设置在所述真空舱的底面上,用于支撑所述真空舱。
13.基于同一发明构思,本发明还提供了磁层顶三维非对称磁重联地面模拟真空装置,所述装置包括:
14.所述的磁层顶三维非对称磁重联地面模拟真空舱;
15.进气系统,用于通过所述进气孔控制所述真空舱内气压;
16.真空系统,用于通过所述抽气孔降低所述真空舱内气压;
17.等离子体源系统,用于通过所述等离子体源孔向所述地磁场线圈发射射频波,在地磁场线圈周围产生等离子体球厚壳;
18.冷却系统,用于通过所述冷却系统穿舱孔为所述磁体线圈系统降温;
19.等离子诊断系统,用于通过所述等离子体参数诊断孔采集所述真空舱内等离子体关键参数的分布;
20.磁场诊断系统,用于通过所述磁场诊断孔采集所述真空舱内的磁场位形;
21.控制系统,用于对所述装置中的各系统发送触发控制指令。
22.进一步,提供一种优选实施例,所述冷却系统为水冷冷却系统。
23.进一步,提供一种优选实施例,所述真空舱上进气口有两个,所述进气系统通过两个进气口控制所述真空舱内气压。
24.进一步,提供一种优选实施例,所述进气系统将所述真空舱内气压控制为10-2
pa-10pa。
25.进一步,提供一种优选实施例,所述等离子体诊断系统采集所述真空舱内等离子体关键参数的分布的方法为:通过非接触式的hcn干涉诊断与多道软x射线光谱诊断和接触式的静电探针阵列诊断三种方式。
26.进一步,提供一种优选实施例,所述真空舱采用不锈钢材质。
27.本发明的有益之处在于:
28.本发明提供的磁层顶三维非对称磁重联地面模拟实验装置,解决了现有磁重联研究的实验装置无法真实反映磁层顶磁重联的三维非对称结构特征的问题,可以更准确的反应磁层顶的磁场环境和等离子体环境,以及可在该环境下开展三维非对称磁重联、驱动磁重联、类磁层环境等离子体约束等实验,解决了现有实验装置中存在的不足。
29.本发明提供的磁层顶三维非对称磁重联地面模拟实验装置,与现有磁重联研究的实验装置相比,改进了整体结构关系,并提升了其中的关键参数指标,可以更真实地模拟磁层顶磁场分布和等离子体环境的三维非对称结构,并提供在该磁场和等离子体环境下开展相关研究的磁场和等离子体诊断手段:
30.本发明提供的磁层顶三维非对称磁重联地面模拟实验装置,采用4个磁鞘线圈和1个地磁场线圈通过脉冲激励电源产生的磁场位形能够更真实的反映磁层顶磁重联磁场的三维非对称结构特征;
31.本发明提供的磁层顶三维非对称磁重联地面模拟实验装置,采用位置和角度可调的地磁场线圈和相对位置可调的磁鞘线圈组通过脉冲激励电源可以提供更多的磁场位形分布选择,能够更好的提供多种不同的实验条件,实现对多种磁场位形分布条件下的磁重联的机理研究;
32.本发明提供的磁层顶三维非对称磁重联地面模拟实验装置,对等离子体参数诊断时,用三种不同的方式,即hcn干涉诊断、多道软x射线光谱诊断及静电探针阵列诊断,可以通过相互校核和补充获得更精准和完善的等离子体参数分布和随时间演化;
33.本发明提供的磁层顶三维非对称磁重联地面模拟实验装置,对磁场分布诊断时,使用高分辨率磁探针阵列对磁场进行三维三方向的诊断,并使用偏振干涉诊断进行补充,从而更全面的获得磁场三方向分量的三维分布及其随时间演化;
34.本发明提供的磁层顶三维非对称磁重联地面模拟真空装置,通过控制系统对实验流程进行预编程,通过提前设置实验参数和时序,实现实验流程的全自动化。
35.适合应用于磁层顶三维非对称磁重联的地面模拟实验中。
附图说明
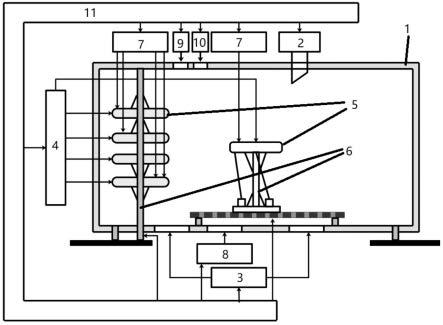
36.图1为实施方式五提供的磁层顶三维非对称磁重联地面模拟实验装置的结构示意图;
37.图2为实施方式十一提到的地磁场线圈处于初始位置和方向情况下的磁力线分布图;
38.图3为实施方式十一提到的地磁场线圈处于初始位置和方向,激励电流与图2反向情况下的磁力线分布图;
39.图4为实施方式十一提到的地磁场线圈处于图2向磁鞘线圈组方向的垂直方向倾斜,激励电流与图2同向情况下的磁力线分布图;
40.图5为实施方式十一提到的地磁场线圈处于图2向磁鞘线圈组方向倾斜,激励电流与图2同向情况下的磁力线分布图;
41.其中,1表示真空舱,2表示等离子体源系统,3表示进气系统,4表示冷却系统,5表示磁体线圈系统,6表示磁体线圈支撑系统,7表示激励系统,8表示真空系统,9表示等离子诊断系统,10表示磁场诊断系统,11表示控制系统,12为磁零点。
具体实施方式
42.为使本发明提供的技术方案的优点和有益之处体现得更清楚,现结合附图对本发明提供的技术方案进行进一步详细地描述,具体的:
43.实施方式一,本实施方式提供了磁层顶三维非对称磁重联地面模拟真空舱,所述真空舱包括:舱体、磁体线圈系统和磁体线圈支撑系统;
44.所述的舱体包括:多个通孔,所述多个通孔分别用于作为进气孔、抽气孔、等离子体源孔、冷却系统穿舱孔、等离子体参数诊断孔和磁场诊断孔;
45.所述磁体线圈系统包括地磁场线圈和磁鞘线圈组,所述地磁场线圈组通过所述磁体线圈支撑系统固定在所述真空舱内部底面,所述磁鞘线圈组穿过所述真空舱的底面并固定。
46.具体的,本实施方式提供的磁层顶三维非对称磁重联地面模拟真空舱可以直接放置于地面上,所述磁鞘线圈组穿过所述真空舱的底面并固定在地面上。
47.实施方式二、本实施方式是对实施方式一提供的磁层顶三维非对称磁重联地面模拟真空舱的进一步限定,所述磁鞘线圈组设置在所述真空舱内部靠近侧壁的位置、包括四
个线圈,所述四个线圈轴线重合,沿所述真空舱高度方向设置;所述地磁场线圈组设置在所述真空舱内部底面中间位置、包括一个线圈,所述线圈与所述真空舱底面平行。
48.实施方式三、本实施方式是对实施方式一提供的磁层顶三维非对称磁重联地面模拟真空舱的进一步限定,所述真空舱还包括:激励系统,所述激励系统用于激励所述地磁场线圈和磁鞘线圈。
49.实施方式四、本实施方式是对实施方式一提供的磁层顶三维非对称磁重联地面模拟真空舱的进一步限定,所述真空舱还包括:支撑架,所述支撑架设置在所述真空舱的底面上,用于支撑所述真空舱。
50.实施方式五、结合图1说明本实施方式,本实施方式提供了磁层顶三维非对称磁重联地面模拟真空装置,所述装置包括:
51.实施方式一至四任意一项提供的磁层顶三维非对称磁重联地面模拟真空舱;
52.进气系统,用于通过所述进气孔控制所述真空舱内气压;
53.真空系统,用于通过所述抽气孔降低所述真空舱内气压;
54.等离子体源系统,用于通过所述等离子体源孔向所述地磁场线圈发射射频波,在地磁场线圈周围产生等离子体球厚壳;
55.冷却系统,用于通过所述冷却系统穿舱孔为所述磁体线圈系统降温;
56.等离子诊断系统,用于通过所述等离子体参数诊断孔采集所述真空舱内等离子体关键参数的分布;
57.磁场诊断系统,用于通过所述磁场诊断孔采集所述真空舱内的磁场位形;
58.控制系统,用于对所述装置中的各系统发送控制指令。
59.所述控制指令包括触发、停止、故障监控、报警、紧急停止等。
60.实施方式六、本实施方式是对实施方式五提供的磁层顶三维非对称磁重联地面模拟真空装置的进一步限定,所述冷却系统为水冷冷却系统。
61.实施方式七、本实施方式是对实施方式五提供的磁层顶三维非对称磁重联地面模拟真空装置的进一步限定,所述真空舱上进气口有两个,所述进气系统通过两个进气口控制所述真空舱内气压。
62.实施方式八、本实施方式是对实施方式五提供的磁层顶三维非对称磁重联地面模拟真空装置的进一步限定,所述进气系统将所述真空舱内气压控制为10-2
pa-10pa。
63.实施方式九、本实施方式是对实施方式五提供的磁层顶三维非对称磁重联地面模拟真空装置的进一步限定,所述等离子体诊断系统采集所述真空舱内等离子体关键参数的分布的方法为:通过非接触式的hcn干涉诊断与多道软x射线光谱诊断和接触式的静电探针阵列诊断三种方式。
64.实施方式十、本实施方式是对实施方式五提供的磁层顶三维非对称磁重联地面模拟真空装置的进一步限定,所述真空舱采用不锈钢材质。
65.实施方式十一、结合图1-5说明本实施方式,本实施方式是对实施方式五提供的磁层顶三维非对称磁重联地面模拟真空装置提供一个具体的实施方式,使实施方式五提供的磁层顶三维非对称磁重联地面模拟真空装置的技术方案更加完整,并且还用于解释实施方式一至十;具体的:
66.所述磁体线圈具体为:四个磁鞘线圈和一个地磁场线圈,所述四个磁鞘线圈通过
磁体线圈支撑系统中的同轴分立强脉冲四线圈组支撑装置设置在真空舱的内部靠近侧壁的位置,所述一个地磁场线圈通过磁体线圈支撑系统中的地磁场线圈支架设置在所述真空舱内部底面中间的位置;
67.地磁场线圈支架可以带动所述地磁场线圈移动、倾斜和转动。
68.所述的同轴分立强脉冲四线圈组支撑装置具体为:
69.包括:导向管,沿所述导向管轴线方向依次滑动连接有第一支撑架、第二支撑架、第三支撑架和第四支撑架;所述第一支撑架和所述第四支撑架沿所述导向管方向对称设置,所述第二支撑架和所述第三支撑架沿所述导向管方向对称设置;
70.所述第一支撑架包括:一个第一固定环、四个第一支撑臂和四个第一侧支臂,所述四个第一支撑臂垂直于所述导向管、均匀分布固定在所述第一固定环的外壁上,所述四个第一支臂上的中间位置分别设置有沿所述导向管平行方向上的通孔;所述四个第一侧支臂分别沿所述导向管平行的方向固定在所述四个第一支撑臂的端部;所述第一固定环用于滑动连接所述导向管;
71.所述第二支撑架包括:一个第二固定环、四个第二支撑臂和四个第二侧支臂,所述四个第二支撑臂垂直于所述导向管、均匀分布固定在所述第二固定环的外壁上,所述四个第二侧支臂的中间位置分别设置有沿所述导向管平行方向的长条形凸起,所述凸起与所述通孔滑动配合;所述四个第二侧支臂分别沿所述导向管平行的方向固定在所述四个第二支撑臂的端部;所述第二固定环用于滑动连接所述导向管。
72.第一侧支臂为中空结构,所述第二侧支臂、所述凸起和第二侧支臂与凸起之间的第二支撑臂的部分均为中空结构。
73.所述四个第一侧支臂分别向所述第二支撑架的反方向延伸,延伸长度至少为所述四个第一侧支臂的初始长度。
74.所述四个第一侧支臂向垂直于所述导向管的平面上的虚拟投影与所述四个第二侧支臂向垂直于所述导向管的平面上的虚拟投影重合。
75.具体为;采用申请号为202210859406.x的专利申请文件中记载的同轴对称强脉冲四线圈组支撑装置;
76.真空舱体用于提供实验真空环境气压条件,气压条件为10-4
~10pa;
77.等离子体源系统将真空舱体内的中性气体电离,在地磁场线圈附近产生密度》10
11
cm-3
的等离子体厚壳;
78.通过结合磁体线圈系统与磁体线圈脉冲激励电源系统,由磁鞘线圈组的4个磁鞘线圈的极子线圈经磁鞘线圈极子线圈脉冲激励电源电流激励在磁鞘线圈组附近产生密度》10
12
cm-3
的等离子体厚壳用于模拟磁层顶磁鞘侧等离子体条件;
79.通过结合磁体线圈系统与磁体线圈脉冲激励电源系统,由地磁场线圈经地磁场线圈脉冲激励电源通电产生模拟地球偶极磁场的实验室偶极磁场,由磁鞘线圈组的4个磁鞘线圈的环子线圈经磁鞘线圈环子线圈脉冲激励电源通电产生模拟磁层顶磁鞘侧驱动磁场的实验室磁鞘磁场,4个磁鞘线圈的环子线圈可以独立通电激励,通过4个磁鞘线圈的环子线圈的任意组合,可以改变实验室磁鞘磁场的位形,可提供多种不同的实验条件;
80.等离子体诊断系统通过非接触式的hcn干涉诊断、多道软x射线光谱诊断和接触式的静电探针阵列诊断三种方式对实验区内的等离子体进行诊断及相互检验,从而获得实验
过程中等离子体关键参数的空间分布和随时间演化;
81.磁场诊断系统通过高分辨率磁探针阵列,非接触式偏振干涉诊断两种方式对实验区内的磁场分布进行诊断,从而获得实验过程中磁场位形的随时间演化;
82.控制系统:用于对实验装置和实验流程进行总体统一控制。
83.磁重联发生于地磁场线圈和磁鞘线圈组中间的实验区,形成磁零点。
84.通过改变地磁场线圈脉冲激励电源激励电流方向,地磁场线圈的旋转角度,可以在不同位置发生磁重联,形成磁零点。
85.磁重联通过磁鞘线圈组的环子线圈产生的脉冲磁场引起的磁压变化和极子线圈产生的等离子体引起的等离子体压强变化共同驱动实验区内的磁重联的发生。
86.所述真空舱体为不锈钢腔体,磁体线圈系统和磁体线圈支撑系统位于真空舱体内部。
87.等离子体源系统使用电子回旋共振等离子体源将工作气体,即为中性气体,电离,在地磁场线圈周围产生等离子体球厚壳。电子回旋共振等离子体源放置在真空舱体外部,通过真空舱体上的石英玻璃窗口将电磁波注入至真空舱体内,共包括2台工作频率分别为2.45g和6.4g的等离子体源,可分别在地磁场线圈周围875g和2286g等磁场强度面附近电离中性气体形成等离子体球厚壳,用于模拟磁层顶磁层侧的等离子体环境,所产生的等离子体最高密度不低于10
11
cm-3
。
88.进气系统通过阀门(闸板阀与蝶阀)的开启时间和供气气压对进气量进行控制,实现满足不同工作气压要求的真空环境。实施实验时,通过进气系统向真空舱体内填充氢气、氩气和氦气中的一种或多种作为工作气体,工作气压为10-4
~10pa。
89.冷却系统为磁体线圈系统的水冷装置,通过铜焊或接头的方式将入水不锈钢管道和出水不锈钢管道与磁体线圈系统的铜导线经水电分离后的入水口和出水口分别连接在一起,通过调整冷却系统的水流量和入水口温度实现对磁体线圈系统通电产生的温升进行冷却;
90.磁体线圈系统包括地磁场线和磁鞘线圈组,其中地磁场线圈放置于真空舱体内部中间区域的中平面上,截面为圆形或矩形,可沿中平面内的两个坐标轴(真空舱体的轴线(x方向)和中平面内垂直于真空舱轴线的坐标轴的y轴方向进行转动。磁鞘线圈组分4个磁鞘线圈放置于真空舱体内部左侧,沿中平面上下对称,4个磁鞘线圈结构相同,截面为圆形,均包括一组沿大半径方向缠绕的环子线圈和一组沿小半径方向缠绕的极子线圈,4个磁鞘线圈之间的距离可调,地磁场线圈与磁鞘线圈组之间的距离可调。
91.磁体线圈脉冲激励电源系统包括地磁场线圈脉冲激励电源、磁鞘线圈环子线圈脉冲激励电源和磁鞘线圈极子线圈脉冲激励电源,采用脉冲功率源实现;
92.通过结合磁体线圈系统与磁体线圈脉冲激励电源系统实现模拟磁层顶磁场位形的地面实验室磁场和模拟磁层顶磁鞘侧等离子体环境的地面实验室等离子体。地磁场线圈通过地磁场线圈脉冲激励电源的电流激励产生地球偶极磁场的实验室偶极磁场。地磁场线圈脉冲激励电源产生的激励电流峰值电流0~1.7ma可调。峰值电流1.7ma时,磁零点所在位置的最大磁场强度不低于400g。磁鞘线圈组的环子线圈通过磁鞘线圈环子线圈脉冲激励电源产生模拟磁层顶磁鞘侧驱动磁场的实验室磁鞘磁场。磁鞘线圈环子线圈脉冲激励电源产生的激励电流峰值电流0~540ka可调,上升沿时间约240usμs。峰值电流540ka时,通过调整
地磁场线圈与磁鞘线圈组之间的距离,满足磁零点所在位置最大磁场强度不低于400g。4个磁鞘线圈的环子线圈可以独立通电激励,通过4个磁鞘线圈的环子线圈的任意组合,可以改变实验室磁鞘磁场的位形。磁鞘线圈组的极子线圈通过磁鞘线圈极子线圈脉冲激励电源电流激励利用感应放电的方式在磁鞘线圈组附近产生模拟磁层顶磁鞘侧等离子体环境的实验室等离子体厚壳。磁鞘线圈极子线圈脉冲激励电源产生的激励电流峰值电流0~250ka可调,上升沿时间约80usμs,通过感性耦合放电在磁鞘线圈组附近产生最高密度不低于10
12
cm-3
的等离子体厚壳用于在实验室中模拟磁层顶磁鞘侧的等离子体环境。
93.真空系统与真空舱体连接,实现真空舱体内极限真空10-4
pa。
94.磁体线圈支撑系统包括地磁场线圈支撑系统和磁鞘线圈组支撑系统,其中地磁场线圈支撑系统用于对地磁场线圈进行移动、转动及支撑,磁鞘线圈组支撑系统用于对磁鞘线圈组的4个磁鞘线圈进行移动及支撑;
95.等离子体诊断系统通过非接触式的hcn干涉诊断、多道软x射线光谱诊断和接触式的静电探针阵列诊断三种方式对实验区内的等离子体进行诊断及相互检验,从而获得实验过程中等离子体关键参数的分布和随时间演化;
96.磁场诊断系统通过高分辨率磁探针阵列,非接触式偏振干涉诊断两种方式对实验区内的磁场分布进行诊断,从而获得实验过程中磁场位形的随时间演化;
97.控制系统用于对实验装置和实验流程进行总体统一控制。
98.实施实验时,在磁鞘线圈组和地磁场线圈之间存在磁零点。
99.实施方式十二、本实施方式为实施方式十一提供的磁层顶三维非对称磁重联地面模拟真空装置提供一个模拟方法:
100.所述方法具体包括以下步骤:
101.步骤1:将地磁场线圈放置在真空舱内部的地磁场线圈支撑系统的支架上;
102.步骤2:将磁鞘线圈组的4个磁鞘线圈放置在同轴分立强脉冲四线圈组支撑装置上;
103.步骤3:调整好地磁场线圈的位置和角度,磁鞘线圈组的4个磁鞘线圈的相对位置,确定好地磁场线圈和磁鞘线圈组的中心距离;
104.步骤4:开启真空装置;
105.步骤5:待真空完全建立,达到实验需要的真空条件后,打开冷却系统;
106.步骤6:打开磁体线圈脉冲激励电源系统充电开关开始充电、等离子体参数诊断系统和磁场诊断系统的采集触发开关开始采集,利用等离子体参数诊断系统和磁场诊断系统对实验区等离子体分布和磁场分布的随时演化进行参数诊断;
107.步骤7:待磁体线圈脉冲激励电源系统充电完成后,按实验要求的时序和时间间隔依次打开进气系统、地磁场线圈脉冲激励电源、等离子体源系统、磁鞘线圈环子线圈脉冲激励电源和磁鞘线圈极子线圈脉冲激励电源,开展磁重联实验。
108.步骤8:待磁体线圈脉冲激励电源系统放电完毕后,关闭等离子体参数诊断系统和磁场诊断系统;完成实验。
109.以上通过几个具体实施方式对本发明提供的技术方案进行进一步详细地说明,是为了使本发明提供的技术方案的优点和有益之处体现得更具体,不过以上所述实施方式仅仅是为了突出本发明的技术方案,并不用于作为对本发明的限制,任何基于本发明的精神
和原则范围内的,对本发明的修改和改进、实施方式的组合和等同替换等,均应当包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1