基于高精度定位的激光雷达动态标定方法及其装置与流程
本发明涉及激光雷达标定,尤其涉及一种基于高精度定位的激光雷达动态标定方法及其装置。
背景技术:
1、目前的自动驾驶感知系统,通常依赖毫米波雷达、相机、激光雷达等多传感器耦合,得到多种传感器检测的数据,以提高目标定位及识别的精度,从而提高自动驾驶系统的安全冗余以及稳定性。因此,激光雷达的精确标定是自动驾驶车辆准确感知外部环境的基础,激光雷达的标定精度越高,点云数据对环境的反映越准确。
2、然而,现有的激光雷达动态标定及失准检测均是基于当前角度测量的结果来估计安装角度偏差,由于缺少真值,造成激光雷达的标定精度较低。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种基于高精度定位的激光雷达动态标定方法及其装置,利用高精度定位对激光雷达进行标定,将结构化道路的车道线作为激光雷达的真值,能够有效提高激光雷达的标定精度。
2、为了实现上述目的,本发明实施例提供了一种基于高精度定位的激光雷达动态标定方法,包括:
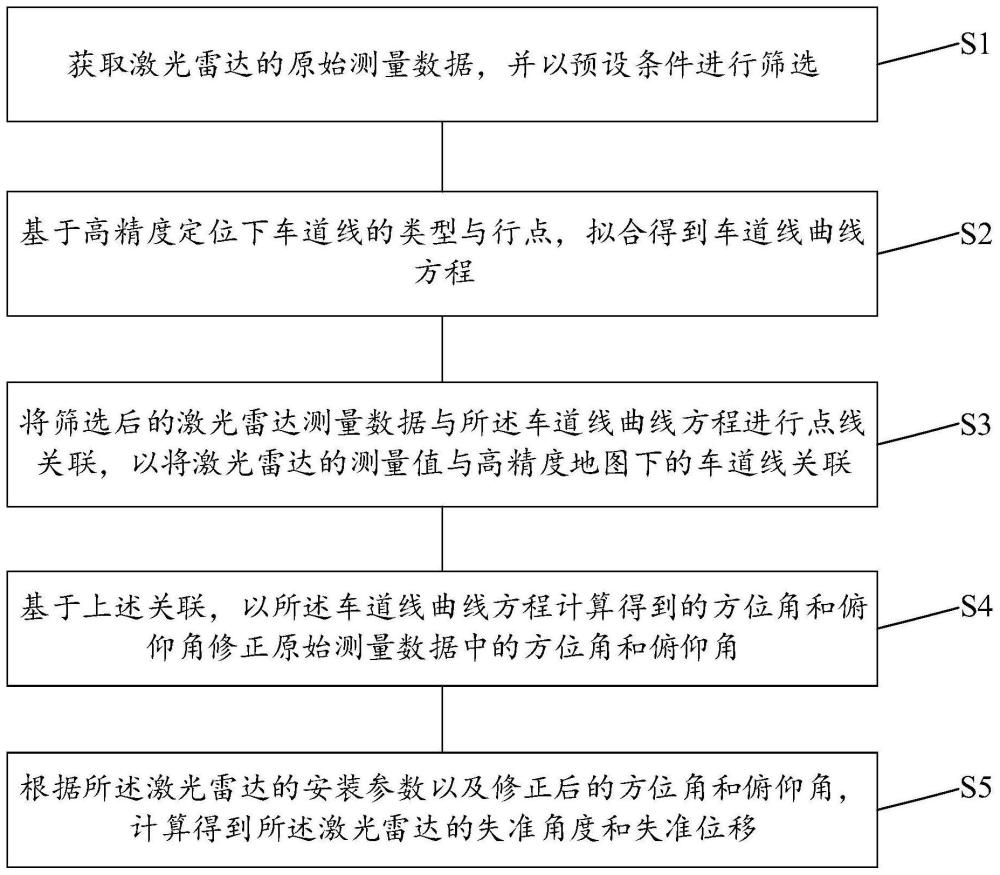
3、获取激光雷达的原始测量数据,并以预设条件进行筛选;
4、基于高精度定位下车道线的类型与行点,拟合得到车道线曲线方程;
5、将筛选后的激光雷达测量数据与所述车道线曲线方程进行点线关联,以将激光雷达的测量值与高精度地图下的车道线关联;
6、基于上述关联,以所述车道线曲线方程计算得到的方位角和俯仰角修正原始测量数据中的方位角和俯仰角;
7、根据所述激光雷达的安装参数以及修正后的方位角和俯仰角,计算得到所述激光雷达的失准角度和失准位移。
8、作为上述方案的改进,所述获取激光雷达的原始测量数据之前,还包括:
9、将所述激光雷达与高精度定位模块进行时间同步。
10、作为上述方案的改进,所述获取激光雷达的原始测量数据之前,还包括:
11、获取车辆的车速以及车身姿态参数,并根据所述车速以及所述车身姿态参数判断是否满足预设的动态标定条件;其中,车身姿态参数包括加速度、方向盘转角、偏航率以及俯仰率。
12、作为上述方案的改进,所述预设条件为:
13、所述原始测量数据为静止的,且置信度大于预设阈值。
14、作为上述方案的改进,所述基于高精度定位下车道线的类型与行点,拟合得到车道线曲线方程,具体包括:
15、通过高精度定位模块实时获取高精度定位结果;
16、将所述高精度定位结果与高精度地图进行匹配,使真实世界的位置转换为相对于所述高精度地图的位置;
17、获取所述高精度地图播发的基于当前定位匹配的车道线的类型与行点,以车辆中心为原点,拟合得到车道线曲线方程。
18、作为上述方案的改进,所述根据所述激光雷达的安装参数以及修正后的方位角和俯仰角,计算得到所述激光雷达的失准角度和失准位移,具体包括:
19、根据所述激光雷达的安装位置参数、修正后的方位角以及修正后的俯仰角建立方程组:
20、
21、
22、其中,rangen表示原始测量数据中的距离;θn表示原始测量数据中的方位角;表示原始测量数据中的俯仰角;θ0表示安装时的方位角;表示安装时的俯仰角;ψ0表示安装时的翻滚角;θδ表示待标定的方位角;表示待标定的俯仰角;ψδ表示待标定的翻滚角;(xδ,yδ,zδ)表示待标定的位置偏差;θn′表示修正后的方位角;表示修正后的俯仰角;
23、通过估计方法对所述方程组进行求解,得到所述激光雷达的失准角度和失准位移(xδ,yδ,zδ)。
24、作为上述方案的改进,所述方法还包括:
25、计算第m时刻的车身姿态角为:
26、
27、
28、
29、其中,yawanglem,pitchanglem,rollanglem分别为第m时刻的车身姿态角,yawrate,pitchrate,rollrate分别为偏航率、俯仰率、翻滚率,δt为车身姿态角的更新周期;
30、根据公式:
31、
32、
33、
34、对所述激光雷达的失准角度进行滤波;
35、其中,分别为滤波后的角度,n为积累的帧数,分别为第i帧计算的失准角度,yawanglei,pitchanglei,rollanglei分别为第i时刻的车身姿态角。
36、作为上述方案的改进,所述方法还包括:
37、计算ti时刻与tj时刻的车身姿态角之差为:
38、
39、
40、
41、其中,δyawanglei-j为ti时刻与tj时刻的偏航角之差,δpitchanglei-j为ti时刻与tj时刻的俯仰角之差,δrollanglei-j为ti时刻与tj时刻的翻滚角之差,yawrate,pitchrate,rollrate分别为偏航率、俯仰率、翻滚率;
42、采用滤波算法对所述激光雷达的失准角度进行滤波。
43、本发明实施例还提供了一种基于高精度定位的激光雷达动态标定装置,包括激光雷达和数据处理设备,所述激光雷达与所述数据处理设备间有通信连接;
44、所述激光雷达将其原始测量数据发送至所述数据处理设备;
45、所述数据处理设备中设有校准算法模块,其在运行时执行下述处理:
46、以预设条件筛选原始测量数据;基于高精度定位下车道线的类型与行点,拟合得到车道线曲线方程;
47、将筛选后的激光雷达测量数据与所述车道线曲线方程进行点线关联,以将激光雷达的测量值与高精度地图下的车道线关联;
48、基于上述关联,以所述车道线曲线方程计算得到的方位角和俯仰角修正原始测量数据中的方位角和俯仰角;
49、根据所述激光雷达的安装参数以及修正后的方位角和俯仰角,计算得到所述激光雷达的失准角度和失准位移。
50、作为上述方案的改进,所述数据处理设备中还设有高精度定位模块以及高精度地图,所述高精度定位模块用于实时获取高精度定位结果。
51、作为上述方案的改进,所述数据处理设备作为时间同步master发送同步报文,所述激光雷达作为时间同步slave响应所述同步报文,以将所述激光雷达的时间轴与所述数据处理设备的时间同步。
52、本发明实施例还提供了一种基于高精度定位的激光雷达动态标定装置,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述的基于高精度定位的激光雷达动态标定方法。
53、相对于现有技术,本发明实施例提供的一种基于高精度定位的激光雷达动态标定方法及其装置的有益效果在于:通过获取激光雷达的原始测量数据,并以预设条件进行筛选;基于高精度定位下车道线的类型与行点,拟合得到车道线曲线方程;将筛选后的激光雷达测量数据与所述车道线曲线方程进行点线关联,以将激光雷达的测量值与高精度地图下的车道线关联;基于上述关联,以所述车道线曲线方程计算得到的方位角和俯仰角修正原始测量数据中的方位角和俯仰角;根据所述激光雷达的安装参数以及修正后的方位角和俯仰角,计算得到所述激光雷达的失准角度和失准位移。本发明实施例通过高精度定位下车道线的类型与行点拟合得到车道线曲线方程,将结构化道路的车道线作为激光雷达的真值对激光雷达进行标定,能够有效提高激光雷达的标定精度。
- 还没有人留言评论。精彩留言会获得点赞!