一种确定车辆行驶轨迹的方法、装置及车辆与流程
本技术涉及智能驾驶,尤其涉及一种确定车辆行驶轨迹的方法、装置及车辆。
背景技术:
1、实现智能驾驶的关键技术包括:感知、定位、规划、决策、执行控制等。感知主要包括感知周围环境,例如,通过安装在车辆上的传感器检测障碍物等信息。定位主要包括获取车辆当前的位置信息,例如,通过全球定位系统(global positioning system,gps)获取车辆所在的车道等信息。规划主要包括确定导航路径或行驶轨迹,例如根据出发地和目的地为车辆确定导航路径,以及根据车辆周围的障碍物信息和车辆的位置信息为车辆确定行驶轨迹等。决策主要包括确定目标导航路径和目标行驶轨迹等。执行控制指根据决策结果执行相应指令以控制车辆行驶,例如,执行扭矩指令或制动指令等控制车辆基于目标行驶轨迹行驶。
2、近年来,受各种风险事件的影响,出行安全成为人们非常关注的问题,而现有的智能驾驶技术在规划行驶轨迹时,大多并未考虑风险事件所带来的安全风险。或者,即使考虑了风险事件,在规划行驶轨迹时的常规操作都是避开风险区域。而避开风险区域往往会导致所规划的行驶路径较远,出行效率低。
技术实现思路
1、本技术提供一种确定车辆行驶轨迹的方法、装置及车辆,用于在保障出行安全的情况下提升出行效率。
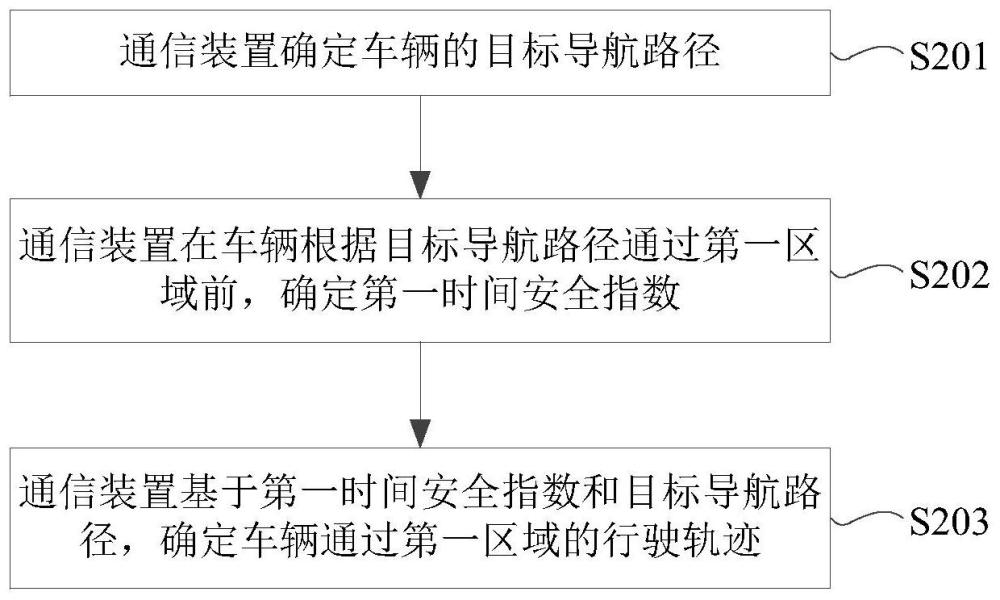
2、第一方面,本技术提供一种确定行驶轨迹的方法,该方法包括:确定车辆的目标导航路径,在所述车辆根据所述目标导航路径通过第一区域前,确定第一时间安全指数,所述第一时间安全指数指示所述车辆基于所述目标导航路径通过所述第一区域的时间安全程度,所述第一区域为具有安全风险的区域;基于所述第一时间安全指数以及所述目标导航路径,确定所述车辆通过所述第一区域的行驶轨迹。
3、该方法可由通信装置执行,通信装置例如为设置在该车辆上的控制装置,该控制装置例如是该车辆中的域控制器、电子控制单元(electronic control unit,ecu)、计算平台等。或者,通信装置为该车辆。或者,通信装置例如为设置在该车辆上的芯片,或为设置在该车辆上的相应车载装置内的芯片,该车载装置例如为域控制器、ecu、计算平台等。或者,通信装置为路侧设备,或为设置在路侧设备中的行驶轨迹规划模块(如具有行驶轨迹规划能力的芯片)等。或者,通信装置为服务器,或为设置在服务器中的行驶轨迹规划模块(如具有行驶轨迹规划能力的芯片)等。
4、基于上述方案,在车辆根据目标导航路径通过第一区域前,可以确定基于该目标导航路径通过第一区域的时间安全程度,根据该时间安全程度和目标导航路径确定车辆在第一区域的行驶轨迹,使得车辆可以基于确定的行驶轨迹在第一区域限定的通行时长内通过该第一区域,而不需要避开第一区域。由于车辆是在第一区域限定的通行时长内通行,因此能够保证安全。且该车辆不必避开第一区域,减小了绕路的概率,能够提升通行效率。
5、在一种可能的实现方式中,确定第一时间安全指数,包括:获取所述第一区域内的交通信息;根据所述交通信息以及所述目标导航路径预测第一通行时长,所述第一通行时长为所述车辆基于所述目标导航路径在所述第一区域内的通行时长;根据所述第一通行时长和第二通行时长确定所述第一时间安全指数,所述第二通行时长为所述第一区域允许的最长通行时长。也就是说,通过预测的第一通行时长和第一区域允许通行的最长时长确定第一时间安全指数,将第一时间安全指数作为确定行驶轨迹的约束条件,可以使得车辆能够在第一区域允许通行的最长时长内安全通过第一区域,保障出行安全。
6、在一种可能的实现方式中,所述第一时间安全指数为所述第一通行时长与所述第二通行时长的比值。其中,当第一区域的安全风险程度不同时,第一区域允许的通行时长(第二通行时长)可能也不同,因此将第一通行时长与第二通行时长的比值作为第一时间安全指数,使得基于第一时间安全指数确定行驶轨迹时,可以基于统一的参数确定,提升行驶轨迹规划效率。
7、在一种可能的实现方式中,基于所述第一时间安全指数以及所述目标导航路径,确定所述车辆通过所述第一区域的行驶轨迹,包括:获取所述目标导航路径对应的第一距离安全指数,所述第一距离安全指数用于指示所述目标导航路径和所述第一区域之间的距离安全程度;基于所述第一时间安全指数、所述第一距离安全指数以及所述目标导航路径,确定所述车辆通过所述第一区域的行驶轨迹。其中,将第一距离安全指数作为确定行驶轨迹的约束条件,可以使得车辆基于确定的行驶轨迹行驶时,可以尽量远离存在安全风险的区域,进一步提高了出行的安全性。
8、在一种可能的实现方式中,获取所述目标导航路径对应的第一距离安全指数之前,还包括:确定所述目标导航路径上按照第一距离间隔划分的n个道路轨迹点,n为正整数;确定所述n个道路轨迹点中的每个道路轨迹点与所述第一区域之间的第二距离安全指数,获得n个第二距离安全指数;确定所述n个第二距离安全指数的均值为所述第一距离安全指数。其中,距离一般是指点到点的距离,而目标导航路径对应的第一距离安全指数实质是基于目标导航路径上的道路轨迹点到第一区域(例如是第一区域内的预设点)的距离得到的,因此可以在目标导航路径上按照第一距离间隔(例如是间隔1米)采样,获得n个道路轨迹点,基于n个道路轨迹点与第一区域的距离得到第一距离安全指数。
9、在一种可能的实现方式中,在确定所述车辆的行驶轨迹之前,所述方法还包括:根据所述第一距离安全指数和所述第一时间安全指数确定安全风险指数;确定所述安全风险指数小于第一阈值。也就是说,为了保障车辆能够安全通过第一区域,在确定车辆的行驶轨迹之前,还可以先判断安全风险指数,在安全风险指数满足要求(风险指数小于第一阈值)时,再确定行驶轨迹,如果安全风险指数不满足要求,则可以在第一区域外等待,直到安全风险指数满足要求,或者,还可以重新获取新的目标导航路径(即不通过第一区域的目标导航路径),保障出行安全。
10、在一种可能的实现方式中,基于所述第一时间安全指数、所述第一距离安全指数以及所述目标导航路径,确定所述车辆通过所述第一区域的行驶轨迹,包括:基于所述第一时间安全指数、所述第一距离安全指数、所述目标导航路径以及第一信息,确定所述车辆通过所述第一区域的行驶轨迹,其中,所述第一信息包括如下一项或多项:道路限速信息,车辆动力学约束信息,舒适性约束信息,或,左右横向边界约束信息。也就是说,在确定行驶轨迹时,除了可以将第一时间安全指数和第一距离安全指数作为约束条件,还可以将一些传统的信息(第一信息),例如,道路限速信息、车辆动力学约束信息、舒适性约束信息或左右横向边界约束信息等作为确定行驶轨迹约束信息,可以更好的兼顾安全风险,且有助于提升用户乘坐体验。
11、在一种可能的实现方式中,基于所述第一时间安全指数、所述第一距离安全指数、所述目标导航路径以及第一信息,确定所述车辆通过所述第一区域的行驶轨迹,包括:基于所述第一距离安全指数、所述目标导航路径和所述第一信息确定所述车辆通过所述第一区域的行驶路径信息,以及基于所述第一时间安全指数和所述第一信息确定所述车辆通过所述第一区域的行驶速度信息;根据所述行驶路径信息和行驶速度信息确定所述行驶轨迹。也就是说,确定行驶轨迹时,将第一时间安全指数和第一信息(例如,道路限速信息、车辆动力学约束信息、舒适性约束信息等)作为行驶速度的约束条件,使得车辆在满足道路限速的情况下,尽可能快的通过第一区域,有助于最大程度的兼顾出行效率和出行安全,以及,将第一距离安全指数和第一信息(例如,车辆动力学约束信息、舒适性约束信息、左右横向边界约束信息等)作为行驶路径的约束条件,使得车辆在满足左右横向边界的条件下,尽可能远离第一区域,有助于保障出行安全。
12、在一种可能的实现方式中,所述车辆在所述行驶轨迹上的横向速度大于第一速度,且所述横向速度与所述第一速度之间的差值小于第一值,所述第一速度为所述车辆动力学约束信息对应的最小横向速度。也就是说,确定行驶轨迹时,在满足车辆动力学约束的条件下将横向速度最小化,可以最大程度保障用户乘坐的舒适性,有助于提升用户乘坐体验。
13、在一种可能的实现方式中,所述车辆在所述行驶轨迹上的纵向速度小于第二速度,且所述第二速度与所述纵向速度之间的差值小于第二值,所述第二速度为所述道路限速信息对应的最大速度。也就是说,确定行驶轨迹时,在满足道路限速时将纵向速度最大化,使得车辆可以尽可能快的通过第一区域,减小安全风险。
14、在一种可能的实现方式中,所述车辆在所述行驶轨迹上的加速度大于第一加速度,且所述加速度与所述第一加速度之间的差值小于第三值,所述第一加速度为所述车辆动力学约束信息对应的最小加速度。其中,加速度包括横向加速度和纵向加速度,相应的,第一加速度包括第一横向加速度和第一纵向加速度,确定行驶轨迹时,在满足车辆动力学约束的条件下将横向加速度和纵向加速度最小化,即横向加速度尽可能接近第一横向加速度,纵向加速度尽可能接近第一纵向加速度,可以最大程度保障用户乘坐的舒适性,有助于提升用户乘坐体验。
15、在一种可能的实现方式中,所述车辆在所述行驶轨迹上的加加速度大于第一加加速度,且所述加加速度与所述第一加加速度之间的差值小于第四值,所述第一加加速度为所述舒适性约束信息对应的最小加加速度。其中,加加速度包括横向加加速度和纵向加加速度,相应的,第一加加速度包括第一横向加加速度和第一纵向加加速度,确定行驶轨迹时,在满足车辆动力学约束的条件下将横向加加速度和纵向加加速度最小化,即横向加加速度尽可能接近第一横向加加速度,纵向加加速度尽可能接近第一纵向加加速度,可以最大程度保障用户乘坐的舒适性,有助于提升用户乘坐体验。
16、在一种可能的实现方式中,所述行驶轨迹对应的第二时间安全指数小于所述第一时间安全指数,且所述第一时间安全指数与所述第二距离安全指数之间的差值大于第二阈值,所述第二时间安全指数用于指示所述车辆基于所述行驶轨迹通过所述第一区域的时间安全程度。其中,第三时间安全指数越小表明车辆基于确定的行驶路径行驶越安全,确定行驶轨迹时,将时间安全指数最小化,即尽可能使第二时间安全指数远小于第一时间安全指数,使得车辆基于确定的行驶轨迹行驶时,可以尽可能的快的通过第一区域,保障出行安全。
17、在一种可能的实现方式中,所述行驶轨迹对应的第三距离安全指数小于所述第一距离安全指数,且所述第一距离安全指数与所述第三距离安全指数之间的差值大于第三阈值,所述第三距离安全指数用于指示所述行驶轨迹和所述第一区域的距离安全程度。其中,第三距离安全指数越小表明确定的行驶路径越安全,确定行驶轨迹时,将距离安全指数最小化,即第三距离安全指数尽可能比第一距离安全指数小,使得车辆基于确定的行驶轨迹行驶时,可以尽可能的远离第一区域,更大程度的保障出行安全。
18、第二方面,本技术提供一种通信装置,该通信装置用于实现上述第一方面或第一方面中的任意一种方法,包括相应的功能模块,分别用于实现以上方法中的步骤。功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块。
19、在一种可能的实施方式中,该通信装置可以括处理模块,用于确定车辆的目标导航路径,在所述车辆根据所述目标导航路径通过第一区域前,确定第一时间安全指数,所述第一时间安全指数指示所述车辆基于所述目标导航路径通过所述第一区域的时间安全程度,所述第一区域为具有安全风险的区域,基于所述第一时间安全指数以及所述目标导航路径,确定所述车辆通过所述第一区域的行驶轨迹。
20、在一种可能的实施方式中,所述装置还包括获取模块,用于获取所述第一区域内的交通信息;所述处理模块具体用于:根据所述交通信息以及所述目标导航路径预测第一通行时长,所述第一通行时长为所述车辆基于所述目标导航路径在所述第一区域内的通行时长;根据所述第一通行时长和第二通行时长确定所述第一时间安全指数,所述第二通行时长为所述第一区域允许的最长通行时长。
21、在一种可能的实施方式中,所述第一时间安全指数为所述第一通行时长与所述第二通行时长的比值。
22、在一种可能的实施方式中,获取模块还用于获取所述目标导航路径对应的第一距离安全指数,所述第一距离安全指数用于指示所述目标导航路径和所述第一区域之间的距离安全程度;所述处理模块具体用于:基于所述第一时间安全指数、所述第一距离安全指数以及所述目标导航路径,确定所述车辆通过所述第一区域的行驶轨迹。
23、在一种可能的实施方式中,所述处理模块还用于:确定所述目标导航路径上按照第一距离间隔划分的n个道路轨迹点,n为正整数;确定所述n个道路轨迹点中的每个道路轨迹点与所述第一区域之间的第二距离安全指数,获得n个第二距离安全指数;确定所述n个第二距离安全指数的均值为所述第一距离安全指数。
24、在一种可能的实施方式中,所述处理模块还用于根据所述第一距离安全指数和所述第一时间安全指数确定安全风险指数;确定所述安全风险指数小于第一阈值。
25、在一种可能的实施方式中,所述处理模块具体用于:基于所述第一时间安全指数、所述第一距离安全指数、所述目标导航路径以及第一信息,确定所述车辆通过所述第一区域的行驶轨迹,其中,所述第一信息包括如下一项或多项:道路限速信息,车辆动力学约束信息,舒适性约束信息,或,左右横向边界约束信息。
26、在一种可能的实施方式中,所述处理模块,具体用于:基于所述第一距离安全指数、所述目标导航路径和所述第一信息确定所述车辆通过所述第一区域的行驶路径信息,以及基于所述第一时间安全指数和所述第一信息确定所述车辆通过所述第一区域的行驶速度信息;根据所述行驶路径信息和行驶速度信息确定所述行驶轨迹。
27、在一种可能的实施方式中,所述车辆在所述行驶轨迹上的横向速度大于第一速度,且所述横向速度与所述第一速度之间的差值小于第一值,所述第一速度为所述车辆动力学约束信息对应的最小横向速度。
28、在一种可能的实施方式中,所述车辆在所述行驶轨迹上的纵向速度小于第二速度,且所述第二速度与所述纵向速度之间的差值小于第二值,所述第二速度为所述道路限速信息对应的最大速度。
29、在一种可能的实施方式中,所述车辆在所述行驶轨迹上的加速度大于第一加速度,且所述加速度与所述第一加速度之间的差值小于第三值,所述第一加速度为所述车辆动力学约束信息对应的最小加速度。
30、在一种可能的实施方式中,所述车辆在所述行驶轨迹上的加加速度大于第一加加速度,且所述加加速度与所述第一加加速度之间的差值小于第四值,所述第一加加速度为所述舒适性约束信息对应的最小加加速度。
31、在一种可能的实施方式中,所述行驶轨迹对应的第二时间安全指数小于所述第一时间安全指数,且所述第一时间安全指数与所述第二距离安全指数之间的差值大于第二阈值,所述第二时间安全指数用于指示所述车辆基于所述行驶轨迹通过所述第一区域的时间安全程度。
32、在一种可能的实施方式中,所述行驶轨迹对应的第三距离安全指数小于所述第一距离安全指数,且所述第一距离安全指数与所述第三距离安全指数之间的差值大于第三阈值,所述第三距离安全指数用于指示所述行驶轨迹和所述第一区域的距离安全程度。
33、第三方面,本技术提供一种通信装置,该通信装置用于实现上述第一方面或第一方面中的任意一种方法,包括相应的功能模块,分别用于实现以上方法中的步骤。功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块。
34、在一种可能的实现方式中,该通信装置可以包括:处理器和接口电路。该处理器可被配置为支持该通信装置执行以上述第一方面或第一方面中的任意一种方法,该接口电路用于支持该通信装置与其它设备等之间的通信。其中,接口电路可以为收发器,收发器可以为独立的接收器、独立的发射器、集成收发功能的收发器、或者是通信接口。可选地,该通信装置还可以包括存储器,该存储器可以与处理器耦合,其保存该通信装置必要的程序指令和数据。
35、其中,处理器用于确定车辆的目标导航路径;处理器还用于在所述车辆根据所述目标导航路径通过第一区域前,确定第一时间安全指数,所述第一时间安全指数指示所述车辆基于所述目标导航路径通过所述第一区域的时间安全程度,所述第一区域为具有安全风险的区域;以及基于所述第一时间安全指数以及所述目标导航路径,确定所述车辆通过所述第一区域的行驶轨迹。
36、在一种可能的实施方式中,所述处理器还用于通过接口电路获取所述第一区域内的交通信息;所述处理器还用于根据所述交通信息以及所述目标导航路径预测第一通行时长,所述第一通行时长为所述车辆基于所述目标导航路径在所述第一区域内的通行时长;以及根据所述第一通行时长和第二通行时长确定所述第一时间安全指数,所述第二通行时长为所述第一区域允许的最长通行时长。
37、在一种可能的实施方式中,所述第一时间安全指数为所述第一通行时长与所述第二通行时长的比值。
38、在一种可能的实施方式中,所述处理器还用于通过接口电路获取所述目标导航路径对应的第一距离安全指数,所述第一距离安全指数用于指示所述目标导航路径和所述第一区域之间的距离安全程度;所述处理器具体用于:基于所述第一时间安全指数、所述第一距离安全指数以及所述目标导航路径,确定所述车辆通过所述第一区域的行驶轨迹。
39、在一种可能的实施方式中,所述处理器还用于确定所述目标导航路径上按照第一距离间隔划分的n个道路轨迹点,n为正整数;确定所述n个道路轨迹点中的每个道路轨迹点与所述第一区域之间的第二距离安全指数,获得n个第二距离安全指数;确定所述n个第二距离安全指数的均值为所述第一距离安全指数。
40、在一种可能的实施方式中,所述处理器还用于根据所述第一距离安全指数和所述第一时间安全指数确定安全风险指数;确定所述安全风险指数小于第一阈值。
41、在一种可能的实施方式中,所述处理器具体用于基于所述第一时间安全指数、所述第一距离安全指数、所述目标导航路径以及第一信息,确定所述车辆通过所述第一区域的行驶轨迹,其中,所述第一信息包括如下一项或多项:道路限速信息,车辆动力学约束信息,舒适性约束信息,或,左右横向边界约束信息。
42、在一种可能的实施方式中,所述处理器具体用于:基于所述第一距离安全指数、所述目标导航路径和所述第一信息确定所述车辆通过所述第一区域的行驶路径信息,以及基于所述第一时间安全指数和所述第一信息确定所述车辆通过所述第一区域的行驶速度信息;根据所述行驶路径信息和行驶速度信息确定所述行驶轨迹。
43、在一种可能的实施方式中,所述车辆在所述行驶轨迹上的横向速度大于第一速度,且所述横向速度与所述第一速度之间的差值小于第一值,所述第一速度为所述车辆动力学约束信息对应的最小横向速度。
44、在一种可能的实施方式中,所述车辆在所述行驶轨迹上的纵向速度小于第二速度,且所述第二速度与所述纵向速度之间的差值小于第二值,所述第二速度为所述道路限速信息对应的最大速度。
45、在一种可能的实施方式中,所述车辆在所述行驶轨迹上的加速度大于第一加速度,且所述加速度与所述第一加速度之间的差值小于第三值,所述第一加速度为所述车辆动力学约束信息对应的最小加速度。
46、在一种可能的实施方式中,所述车辆在所述行驶轨迹上的加加速度大于第一加加速度,且所述加加速度与所述第一加加速度之间的差值小于第四值,所述第一加加速度为所述舒适性约束信息对应的最小加加速度。
47、在一种可能的实施方式中,所述行驶轨迹对应的第二时间安全指数小于所述第一时间安全指数,且所述第一时间安全指数与所述第二距离安全指数之间的差值大于第二阈值,所述第二时间安全指数用于指示所述车辆基于所述行驶轨迹通过所述第一区域的时间安全程度。
48、在一种可能的实施方式中,所述行驶轨迹对应的第三距离安全指数小于所述第一距离安全指数,且所述第一距离安全指数与所述第三距离安全指数之间的差值大于第三阈值,所述第三距离安全指数用于指示所述行驶轨迹和所述第一区域的距离安全程度。
49、第四方面,本技术提供一种车辆,该车辆包括上述第二方面或第二方面中的任意一种通信装置;或者,包括上述第三方面或第三方面中的任意一种通信装置。上述通信装置为车载设备。
50、第五方面,提供一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,当所述计算机程序在通信装置上运行时,使得所述通信装置执行如上述第一方面提供的方法。
51、第六方面,提供一种计算机程序产品,包括计算机程序,当所述计算机程序在通信装置上运行时,使得所述通信装置执行如上述第一方面所述的方法。
52、第七方面,本技术还提供了一种车辆,包括用户界面、导航模块、行驶轨迹规划模块、储能模块、轨迹跟踪器、执行器以及上述第二方面或上述第三方面中的通信装置。
53、第八方面,本技术还提供了一种智能驾驶系统,包括上述第二方面或上述第三方面中的通信装置,该通信装置为服务器或路侧设备。该智能驾驶系统还包括车辆。
54、上述第二方面至第八方面的有益效果,参见第一方面的有益效果,不重复赘述。
- 还没有人留言评论。精彩留言会获得点赞!