一种辗环直径检测方法
1.本发明涉及辗环检测技术领域,特别是涉及一种辗环直径检测方法。
背景技术:
2.大型锻件是国家重型制造装备和重大工程建设所必需的关键和核心基础部件,对于重工业的锻件尺寸检测中,目前大多还处于人工检测的阶段,如环型锻件的锻造检测过程中,通常需要人工执尺子测量,存在人为的判断误差。另一方面,热锻件所处的检测环境温度高且测量速度较慢。
3.在机器视觉中椭圆的检测方面,霍夫变换(ht,hough transform)已广泛用于检测几何元素,如线段ls、lss(line segment(s))(或短线段)、圆和椭圆。但由于计算负担重,内存消耗多,在实际应用中直接应用霍夫变换不切实际。
4.目前,国内外大型环件的尺寸检测方法,依据与被测对象的接触方式进行分类,可以分为接触式和非接触式。接触式测量法通过点对点的测量方式,能够完成外径、内径的检测,但误差大、精度低,而且对操作人员的伤害较大,不提倡。非接触式测量法则有效地避免了操作人员与热态环件的直接接触,提高了测量精度。目前辗环检测存在着背景复杂,检测速度慢且有误检和漏检的问题。本发明提出一种辗环直径检测方法,有效且能在线测量环形锻件直径。
技术实现要素:
5.本发明实施例提供了一种辗环直径检测方法,可以解决现有技术中存在的问题。
6.本发明提供一种辗环直径检测方法,包括以下步骤:
7.采集辗环图像;
8.对所述辗环图像进行背景分离和边缘锐化预处理得到带有二值边缘的图a;
9.通过弧支撑线段对所述图a中的目标椭圆进行拟合得到拟合椭圆集;
10.通过椭圆叠加原理计算出拟合椭圆集中各个拟合椭圆的直径的像素长度;
11.计算出所述辗环图像的标定系数;
12.根据多个所述拟合椭圆的直径的像素长度和标定系数来计算目标椭圆的直径,根据所述目标椭圆的直径来获取辗环的内外径。
13.优选的,通过ccd工业相机对已锻造好的辗环进行图像采集,获得图像格式为rgb的辗环图像。
14.优选的,通过深度学习的语义分割对所述辗环图像进行背景分离,通过色彩空间hsv变换对背景分离后的所述辗环图像进行边缘锐化。
15.优选的,所述色彩空间hsv变换的计算公式为:
[0016][0017]
s=((max-min)/max)*100/255
[0018]
v=max*100/255
[0019]
式中,max=max(r,g,b),min=min(r,g,b),h为色调,s为饱和度,v为明度。
[0020]
优选的,通过弧支撑线段对所述图a中的目标椭圆进行拟合得到拟合椭圆集具体包括以下步骤:
[0021]
通过canny算子提取所述图a的二值边缘区域;
[0022]
在所述二值边缘区域提取多个弧支撑线段构成多个弧支撑组;
[0023]
多个所述弧支撑组构成拟合在图a中的目标椭圆上的初始椭圆集;
[0024]
对所述初始椭圆集进行聚类去除集中重复的椭圆得到候选椭圆集;
[0025]
通过评分公式对所述候选椭圆集进行评分得到最优的拟合椭圆集。
[0026]
优选的,所述评分公式为:
[0027][0028]
式中,t
ac
为弧支撑线段连接处角度间隔累加的跨越角度,l为每个椭圆上线段长度之和,s为目标椭圆的周长,g为优度评分。
[0029]
优选的,通过椭圆叠加原理计算出拟合椭圆集中各个拟合椭圆的直径的像素长度,具体包括以下步骤:
[0030]
多个所述弧支撑线段构成点集;
[0031]
计算所述点集的散点矩阵;
[0032]
根据所述散点矩阵得到具有正特征值的特征向量;
[0033]
根据所述特征向量得到拟合椭圆的直径像素长度。
[0034]
优选的,计算所述辗环图像的标定系数具体包括以下步骤:
[0035]
在所述辗环图像中设置一条参考线段并测出其实际长度;
[0036]
通过色彩空间hsv变换提取带有二值边缘的参考线段;
[0037]
通过霍夫变换计算出带有二值边缘的所述参考线段的像素长度;
[0038]
根据所述参考线段的实际长度和像素长度计算出标定系数。
[0039]
优选的,所述霍夫变换用于将参考线段的点从平面坐标转换至极坐标。
[0040]
与现有技术相比,本发明的有益效果是:
[0041]
对于锻造好的辗环,通过ccd相机采集图像。对于此图像,通过hsv空间变换与弧支撑线段拟合的辗环直径检测能去除复杂背景,高鲁棒性地减少误检和漏检且检测速度较快。实验结果表明,针对环形锻件的外环和内环检测准确率分别约为95.6%,98.1%。
附图说明
[0042]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0043]
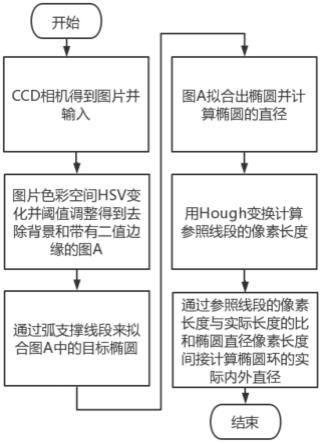
图1为本发明的整体流程框架图;
[0044]
图2(a)为本发明中的辗环的rgb图像;
[0045]
图2(b)为本发明中的辗环的hsv图像
[0046]
图3为本发明的参考直线像素长度计算的流程图;
[0047]
图4为弧支撑线段形成椭圆的示意图;
[0048]
图5为本发明的参考线段的直角坐标图;
[0049]
图6为本发明的参考线段的极坐标图;
[0050]
图7为本发明的多点共线的直线的示意图;
[0051]
图8为本发明的参考线段的示意图。
具体实施方式
[0052]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0053]
参照图1-8,本发明提供了一种辗环直径检测方法,包括以下步骤:
[0054]
第一步:通过ccd工业相机对已锻造好的辗环进行图像采集,采集的图像为rgb图像。
[0055]
第二步:对采集好的辗环图像进行预处理,预处理的过程包括通过深度学习的语义分割对辗环图像进行背景分离,通过色彩空间hsv变换对背景分离后的辗环图像进行边缘锐化。相对于rgb空间,hsv空间能够非常直观的表达色彩的明暗,色调,以及鲜艳程度。如图2所示,hsv色彩空间变化并调整阈值后使得辗环图像二值化,辗环图像亮度影响减小,使边缘更加清晰,便于边缘的线段提取。
[0056]
rgb图像转换为hsv图像的具体步骤:假设rgb图像的阈值范围为[0,1],max=max(r,g,b),min=min(r,g,b),则转换到hsv空间的计算公式为公式(1),(2),(3),接着使用opencv中的inrange函数调整阈值:
[0057][0058]
s=((max-min)/max)*100/255
ꢀꢀ
(2)
[0059]
v=max*100/255
ꢀꢀ
(3)
[0060]
预处理完成后得到带有二值边缘的图a。
[0061]
第三步:通过弧支撑线段对图a中的目标椭圆进行拟合得到拟合椭圆集。通过弧支撑线段对图a中的目标椭圆进行拟合得到拟合椭圆集具体包括以下步骤:
[0062]
首先,先使用canny算子提取锻件的若干边缘,这些边缘所在的区域为弧支撑区域。
[0063]
在二值边缘区域提取多个弧支撑线段,弧支撑线段为大于一定曲率的线段,其具有方向和极性。将若干个弧支撑线段组成弧支撑组,组成弧支撑组是弧支撑线段之间必须距离近且有相同的几何性质,两弧支撑线段相连组成弧支撑组参考图4。
[0064]
一个弧支撑组的跨越角度为其中各个弧支撑线段的间隔角度之和,跨越角度越大,弧支撑组越可能组成拟合在目标椭圆上的椭圆,若干个弧支撑组构成拟合在目标椭圆上的初始椭圆集。多个弧支撑组构成拟合在图a中的目标椭圆上的初始椭圆集。
[0065]
通过椭圆的方向、半轴和中心来聚类,去除初始椭圆集中重复多余的椭圆,对初始椭圆集进行聚类去除集中重复的椭圆得到候选椭圆集。
[0066]
设候选椭圆集中椭圆的周长与其拟合的目标椭圆的周长比为参数tr和候选椭圆集中椭圆的跨越角度为t
ac+
,则其两个参数的乘积在开平方为候选椭圆集中椭圆的优度评分。滤除候选椭圆集中优度评分低的椭圆,初始椭圆集再一次验证简化。通过评分公式对候选椭圆集进行评分得到最优的拟合椭圆集。
[0067]
评分公式为:
[0068][0069]
式中,t
ac
为弧支撑线段连接处角度间隔累加的跨越角度,l为每个椭圆上线段长度之和,s为目标椭圆的周长,g为优度评分。
[0070]
第四步:通过椭圆叠加原理计算出拟合椭圆集中各个拟合椭圆的直径的像素长度。椭圆拟合的叠加原理:
[0071]
若干个弧支撑线段组成拟合到目标椭圆上可表示为一个点集γ1={(x1,y1),(x2,y2),...,(xn,yn)},散点矩阵表示为s=d
t
d,其中d为设c为常数矩阵则通过求解广义的特征方程s-1
d,得到的有正特征值的特征向量表示为拟合椭圆的几何参数,该几何参数包括长轴。将拟合椭圆转换成一般形式,即通过赋值和计算可求的拟合椭圆的长轴的像素长度。
[0072]
第五步:计算出辗环图像的标定系数;在辗环图像中设置一条参考线段并测出其实际长度,通过色彩空间hsv变换提取带有二值边缘的参考线段,接着通过霍夫变换计算出带有二值边缘的参考线段的像素长度,具体为hough变换函数将图5中参考线段二值图像的点从2d平面直角坐标换成图6中的极坐标,设2d平面直角坐标的点为(x,y)则公式如下:
[0073]
ρ=xcosθ+ysinθ
[0074]
参照图7和图8,将参数空间ρ-θ即极坐标上离散化创建一个二维的累加器阵列,即划分成一个个网格且初始为0,每个网格近似看成一个点,经过同一个网格的曲线近似认为交于一点,曲线对应的(x,y)点共线。遍历选取目标直线非背景像素点的直角坐标(x,y)带入极坐标中,在选取θ范围中划分步长累加取θ求出对应的ρ并取整为最近的划分ρ,求出(ρ,θ)并在累加器阵列对应的位置加1。遍历目标像素点和更新完阵列后,通过houghpeaks函数阈值限制和参数设置,可筛选出阵列中的峰值和对应的(ρ,θ),(ρ,θ)可推出多点共线的直线,如图7所示。接着houghlines函数合并距离满足阈值的直线,筛除长度小于阈值的直线,再根据函数求出剩余直线结构体数组,其中参数包括由函数求出与直线相关的极值点(ρ,θ),由此极值点求出的直线起始、终点像素点坐标(x,y)。通过数组参数算出线段像素长度,函数比较线段长度筛选最长的线段。参考线段如图8所示。
[0075]
根据参考线段的实际长度和像素长度计算出标定系数。
[0076]
标定系数的公式为:
[0077][0078]
式中,k为标定系数,l
p
为参考线段的像素长度,l为参考线段的实际长度。
[0079]
第六步:根据多个拟合椭圆的直径的像素长度和标定系数来计算目标椭圆的直径,根据目标椭圆的直径来获取辗环的内外径。通过参考直线的像素长度与其实际长度的比值(标定系数)和椭圆的长轴的像素长度间接求得椭圆长轴的实际长度,进而得到辗环的实际内外直径。
[0080]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0081]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1