一种面向海洋实时精密单点定位方法及系统
1.本发明涉及卫星导航定位技术领域,特别是涉及一种面向海洋实时精密单点定位方法及系统。
背景技术:
2.为了满足广大用户对高精度实时单点定位(real-time precise point positioning,rt-ppp)应用的需求,国际gnss服务(international gnss service,igs)启动了igs-rtppp项目,各个分析中心根据全球实时跟踪网络采集的数据,实时估计卫星轨道和钟差修正量并以状态空间表达(state space representation,ssr)形式基于ntrip(networked transport of rtcm via internetprotocol)协议通过网络向全球播发,此项目的实施扩大了ppp技术的应用领域。对于rtppp应用而言,用户需要具备持续、实时的数据链路为高精度定位提供ssr修正信息。在网络中断或远海等无网络信号的地区通常采用海事卫星通信服务,但卫星通信服务费用昂贵,对使用者来说难以承受,同时存在安全性与可靠性未知等不利因素。
3.作为中国重要的空间基础设施,北斗卫星导航系统不但能够进行导航、定位和授时,还能提供短报文通信服务(shortmessage communication,smc),北斗短报文服务已经在渔业生产、减灾救灾的领域得到了规模化应用。因此,将rtppp技术与北斗短报文服务相结合,通过短报文向远海无网络地区的用户播发定位所需的高精度ssr产品。但是短报文通信带宽小(最大报文长度为78.5字节)、通信频率低(每分钟1次),不能满足海洋高精度定位的要求,并且还会增加用户的使用成本。
技术实现要素:
4.本发明的目的是提供一种面向海洋实时精密单点定位方法及系统,能够满足海洋高精度定位的要求,并且降低用户的使用成本。
5.为实现上述目的,本发明提供了如下方案:
6.一种面向海洋实时精密单点定位方法,包括:
7.用户端对可见卫星的gnss观测量进行编码;并将编码后的gnss观测量通过北斗短报文利用卫星链路发送到服务端;
8.所述服务端根据接收的编码后的gnss观测量,基于ntrip协议通过网络接收所述可见卫星播发的ssr数据;
9.服务器根据接收的ssr数据判断所述可见卫星上一时刻是否存在;
10.若不存在,则将ssr数据进行模糊编码;所述模糊编码包括:播发范围为25m和分辨率为0.2048m;
11.若存在,则判断上一时刻的iod值是否等于当前时刻的iod值;
12.若不等于,则将ssr数据进行模糊编码;
13.若等于,则根据当前时刻的ssr数据和上一时刻的ssr数据确定ssr数据的差分值;
14.判断所述ssr数据的差分值是否小于ssr数据的差分值阈值;
15.若大于或等于,则将ssr数据进行模糊编码;
16.若小于,则将ssr数据进行精确编码;所述精确编码包括:钟差和轨道径向分辨率均为1.6mm以及轨道法向和切向分辨率设置均为6.4mm;
17.所述服务端根据北斗短报文的通信格式,利用卫星链路通过北斗卡将编码后的ssr数据发送给所述用户端;
18.所述用户端对编码后的ssr数据进行对应解码,并根据编码后的ssr数据进行实时精密单点定位。
19.可选地,所述用户端对可见卫星的gnss观测量进行编码,具体包括:
20.对发送所述可见卫星的时刻进行编码;
21.对所述可见卫星的编号进行编码。
22.可选地,将ssr数据进行模糊编码,之前还包括:
23.判断ssr数据是否超过ssr数据第一阈值;
24.若不超过,则将ssr数据进行模糊编码;
25.若超过,则将所述可见卫星的ssr数据舍弃。
26.可选地,所述用户端对编码后的ssr数据进行对应解码,并根据编码后的ssr数据进行实时精密单点定位,具体包括:
27.当所述编码后的ssr数据为模糊编码后的ssr数据时,进行模糊编码的解析;
28.当所述编码后的ssr数据为精确编码后的ssr数据时,进行精确编码的解析;
29.所述用户端根据解析出来的改正数和预置的量化因子对ssr数据进行复原。
30.一种面向海洋实时精密单点定位系统,包括:
31.可见卫星编码模块,用于用户端对可见卫星的gnss观测量进行编码;并将编码后的gnss观测量通过北斗短报文利用卫星链路发送到服务端;
32.ssr数据接收模块,用于所述服务端根据接收的编码后的gnss观测量,基于ntrip协议通过网络接收所述可见卫星播发的ssr数据;
33.第一判断模块,用于服务器根据接收的ssr数据判断所述可见卫星上一时刻是否存在;
34.第一模糊编码模块,用于若不存在,则将ssr数据进行模糊编码;所述模糊编码包括:播发范围为25m和分辨率为0.2048m;
35.第二判断模块,用于若存在,则判断上一时刻的iod值是否等于当前时刻的iod值;
36.第二模糊编码模块,用于若不等于,则将ssr数据进行模糊编码;
37.差分值确定模块,用于若等于,则根据当前时刻的ssr数据和上一时刻的ssr数据确定ssr数据的差分值;
38.第三判断模块,用于判断所述ssr数据的差分值是否小于ssr数据的差分值阈值;
39.第三模糊编码模块,用于若大于或等于,则将ssr数据进行模糊编码;
40.精确编码模块,用于若小于,则将ssr数据进行精确编码;所述精确编码包括:钟差和轨道径向分辨率均为1.6mm以及轨道法向和切向分辨率设置均为6.4mm;
41.编码后的ssr数据发送模块,用于所述服务端根据北斗短报文的通信格式,利用卫星链路通过北斗卡将编码后的ssr数据发送给所述用户端;
42.精密单点定位模块,用于所述用户端对编码后的ssr数据进行对应解码,并根据编码后的ssr数据进行实时精密单点定位。
43.可选地,所述可见卫星编码模块具体包括:
44.可见卫星的时刻编码单元,用于对发送所述可见卫星的时刻进行编码;
45.可见卫星的编号编码单元,用于对所述可见卫星的编号进行编码。
46.可选地,还包括:
47.第四判断模块,用于判断ssr数据是否超过ssr数据第一阈值;
48.第四模糊编码模块,用于若不超过,则将ssr数据进行模糊编码;
49.ssr数据舍弃模块,用于若超过,则将所述可见卫星的ssr数据舍弃。
50.可选地,精密单点定位模块具体包括:
51.第一解析单元,用于当所述编码后的ssr数据为模糊编码后的ssr数据时,进行模糊编码的解析;
52.第二解析单元,用于当所述编码后的ssr数据为精确编码后的ssr数据时,进行精确编码的解析;
53.数据复原单元,用于所述用户端根据解析出来的改正数和预置的量化因子对ssr数据进行复原。
54.根据本发明提供的具体实施例,本发明公开了以下技术效果:
55.本发明所提供的一种面向海洋实时精密单点定位方法及系统,利用短报文双向通信的功能,以及对ssr数据的高度压缩,克服了远海等互联网通信受限地区使用海事卫星通信手段费用太高及可靠性不确定等问题。为了克服北斗短报文带宽窄的限制,本发明采用历元间差分值与原始值组合的编码策略,重新调整分辨率;为了克服北斗短报文通信频率低的限制,本发明采用单张北斗卡播发可见卫星的ssr修正数据,从而进行实时精密单点定位。
附图说明
56.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
57.图1为本发明所提供的一种面向海洋实时精密单点定位方法流程示意图;
58.图2为本发明所提供的一种面向海洋实时精密单点定位系统结构示意图。
具体实施方式
59.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
60.本发明的目的是提供一种面向海洋实时精密单点定位方法及系统,能够满足海洋高精度定位的要求,并且降低用户的使用成本。
61.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
62.本发明通过对三个月的ssr数据的差分值分布情况及特性进行分析,对于非差值模糊编码策略,主要包括如下几部分:历元时刻、卫星标识符、iod值、差分标志位和非差值钟轨改正数。对于差分值精确编码策略,主要包括如下几部分:历元时刻、卫星标识符、差分标志位和差分值钟轨改正数。
[0063][0064]
式中,f为需要编码的ssr数据,r为量化因子,n
bit
为该ssr数据所占位数。
[0065]
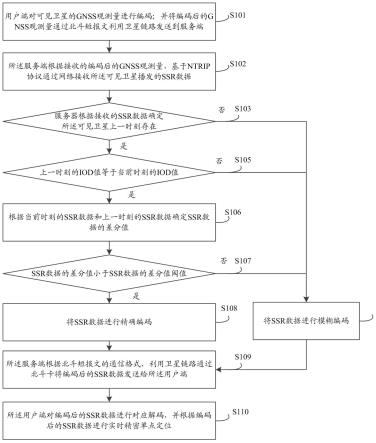
图1为本发明所提供的一种面向海洋实时精密单点定位方法流程示意图,如图1所示,本发明所提供的一种面向海洋实时精密单点定位方法,包括:
[0066]
s101,用户端对可见卫星的gnss观测量进行编码;并将编码后的gnss观测量通过北斗短报文利用卫星链路发送到服务端。用户端根据可见卫星的gnss观测量解析出当前的可见卫星的编号及数量。
[0067]
s101具体包括:
[0068]
对发送所述可见卫星的时刻进行编码,占20位
[0069]
对所述可见卫星的编号进行编码,占72位,其中gps为1-32位,bds为33-72位。
[0070]
s102,所述服务端根据接收的编码后的gnss观测量,基于ntrip协议通过网络接收所述可见卫星播发的ssr数据,并根据rtcm协议进行数据解析。
[0071]
在数据头部分对ssr数据接收时刻进行编码,占20位。
[0072]
s103,服务器根据接收的ssr数据判断所述可见卫星上一时刻是否存在。该步骤是为了判断是否为起始历元。对于起始历元和iod变化的历元,不进行历元间做差,采用模糊编码。
[0073]
s104,若不存在,则将ssr数据进行模糊编码;所述模糊编码包括:播发范围为25m和分辨率为0.2048m。
[0074]
s104之前还包括:
[0075]
判断ssr数据是否超过ssr数据第一阈值。ssr数据第一阈值具体为:gps的轨道径向的ssr数据大部分在0.4m以内,全部在0.6m以内;轨道法向都在2.5m以内;轨道切向和钟差都分布在2.0m以内。bds的轨道径向和切向ssr数据大部分在10m以内,全部都在20m以内;轨道法向和钟差修正幅度稍大,但全都在20m以内。为最大化播发有效数据,将非差值播发范围设定25m。模糊编码一共占32位。
[0076]
若不超过,则将ssr数据进行模糊编码。
[0077]
若超过,则将所述可见卫星的ssr数据舍弃。
[0078]
s105,若存在,则判断上一时刻的iod值是否等于当前时刻的iod值。
[0079]
若不等于,执行s104。
[0080]
s106,若等于,则根据当前时刻的ssr数据和上一时刻的ssr数据确定ssr数据的差分值。
[0081]
s107,判断所述ssr数据的差分值是否小于ssr数据的差分值阈值。以99%的数据重新界定差分值范围,超出99%范围的历元按起始历元处理。为了保证ssr数据的精确性。ssr数据的差分值阈值为gps的钟差在0.1008m以内,轨道径向在0.024m以内,法向和切向修
正都在0.0448m以内;bds的钟差在0.2032m以内,轨道径向在0.1008m以内,法向和切向都在0.024m以内。
[0082]
若大于或等于,则执行s104;
[0083]
s108,若小于,则将ssr数据进行精确编码;所述精确编码包括:钟差和轨道径向分辨率均为1.6mm以及轨道法向和切向分辨率设置均为6.4mm。精确编码占27位。为了将ssr数据与广播星历进行匹配,在差分值标志位后进行iod值编码,占8位,能够完全编码对所需iod值。
[0084]
上述步骤中区分是否对ssr数据进行作差处理,即将ssr数据分为非差值与差分值;为了区分非差值与差分值,在数据体起始位设立差分值标志位,占1位,0表示非差值,1表示差分值。
[0085]
s109,所述服务端根据北斗短报文的通信格式,利用卫星链路通过北斗卡将编码后的ssr数据发送给所述用户端。
[0086]
s110,所述用户端对编码后的ssr数据进行对应解码,并根据编码后的ssr数据进行实时精密单点定位。
[0087]
s110具体包括:
[0088]
当所述编码后的ssr数据为模糊编码后的ssr数据时,进行模糊编码的解析。
[0089]
当所述编码后的ssr数据为精确编码后的ssr数据时,进行精确编码的解析。
[0090]
所述用户端根据解析出来的改正数和预置的量化因子对ssr数据进行复原。
[0091]
用户端接收短报文并根据差分值标志位进行ssr数据解析。若差分值标志位为0,则进行非差值的模糊编码的解析;若差分值标志位为1,则进行差分值的精确编码的解析。用户端根据解析出来的改正数和预置的量化因子对ssr数据进行复原。若为差分值,则需要将当前历元的差分值加到上一历元的ssr数据上进行复原。
[0092]
δk=δ
k-1
+r
·
mk;
[0093]
式中,δk为当前时刻ssr数据,δ
k-1
为上一时刻ssr数据,r为量化因子,mk为当前时刻接收的短报文ssr数据。
[0094]
本发明通过非差值与差分值组合的编码策略,对差分值采用精确编码策略,非差值采用模糊编码策略,通过对ssr数据特性分析进而界定其有效范围,从而降低所占带宽,一张北斗卡即可播发多达19颗卫星的ssr数据。此外,关键点之二采用了一张北斗卡循环播发ssr数据。基于上述措施,本专利所提出的一种面向海洋实时精密单点定位的ssr编码及短报文转发方法研究,使用北斗短报文服务以较小的ssr所占带宽、较低的使用成本播发ssr,能够在远海等无网络环境下进行可靠的高精度位置服务,是短报文服务在位置服务领域的一大应用,具有重要的现实意义。
[0095]
图2为本发明所提供的一种面向海洋实时精密单点定位系统结构示意图,如图2所示,本发明所提供的一种面向海洋实时精密单点定位系统,包括:
[0096]
可见卫星编码模块201,用于用户端对可见卫星的gnss观测量进行编码;并将编码后的gnss观测量通过北斗短报文利用卫星链路发送到服务端。
[0097]
ssr数据接收模块202,用于所述服务端根据接收的编码后的gnss观测量,基于ntrip协议通过网络接收所述可见卫星播发的ssr数据。
[0098]
第一判断模块203,用于服务器根据接收的ssr数据判断所述可见卫星上一时刻是
否存在。
[0099]
第一模糊编码模块204,用于若不存在,则将ssr数据进行模糊编码;所述模糊编码包括:播发范围为25m和分辨率为0.2048m。
[0100]
第二判断模块205,用于若存在,则判断上一时刻的iod值是否等于当前时刻的iod值。
[0101]
第二模糊编码模块206,用于若不等于,则将ssr数据进行模糊编码。
[0102]
差分值确定模块207,用于若等于,则根据当前时刻的ssr数据和上一时刻的ssr数据确定ssr数据的差分值。
[0103]
第三判断模块208,用于判断所述ssr数据的差分值是否小于ssr数据的差分值阈值。
[0104]
第三模糊编码模块209,用于若大于或等于,则将ssr数据进行模糊编码。
[0105]
精确编码模块210,用于若小于,则将ssr数据进行精确编码;所述精确编码包括:钟差和轨道径向分辨率均为1.6mm以及轨道法向和切向分辨率设置均为6.4mm。
[0106]
编码后的ssr数据发送模块211,用于所述服务端根据北斗短报文的通信格式,利用卫星链路通过北斗卡将编码后的ssr数据发送给所述用户端。
[0107]
精密单点定位模块212,用于所述用户端对编码后的ssr数据进行对应解码,并根据编码后的ssr数据进行实时精密单点定位。
[0108]
所述可见卫星编码模块201具体包括:
[0109]
可见卫星的时刻编码单元,用于对发送所述可见卫星的时刻进行编码。
[0110]
可见卫星的编号编码单元,用于对所述可见卫星的编号进行编码。
[0111]
本发明所提供的一种面向海洋实时精密单点定位系统,还包括:
[0112]
第四判断模块,用于判断ssr数据是否超过ssr数据第一阈值。
[0113]
第四模糊编码模块,用于若不超过,则将ssr数据进行模糊编码。
[0114]
ssr数据舍弃模块,用于若超过,则将所述可见卫星的ssr数据舍弃。
[0115]
精密单点定位模块212具体包括:
[0116]
第一解析单元,用于当所述编码后的ssr数据为模糊编码后的ssr数据时,进行模糊编码的解析。
[0117]
第二解析单元,用于当所述编码后的ssr数据为精确编码后的ssr数据时,进行精确编码的解析.
[0118]
数据复原单元,用于所述用户端根据解析出来的改正数和预置的量化因子对ssr数据进行复原。
[0119]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0120]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1