一种深层水平位移测量的活动式测斜仪及方法与流程
1.本发明涉及工程自动化测量领域,特别是涉及一种深层水平位移测量的活动式测斜仪及方法。
背景技术:
2.测斜技术被广泛应用在土体变形的监测中,对预测预警施工风险起到非常关键的作用,尤其是在深基坑的基建项目中。该方法是首先在监测位置的土体中埋设测斜管,将测斜仪顺导槽放入测斜管内,然后每500mm进行逐段测量。测斜仪会随着测斜管协调变形,测量出测管轴线与铅垂线之间的夹角,从而计算出测斜管内各个测点的水平位移与倾斜曲线。最终达到监测土体变形的目的。
3.在深基坑水平位移监测中,测斜管的埋设质量对监测数据精确度存在一定的影响,尤其是当测斜管发生扭曲时,即测斜管导槽偏离垂直基坑方向,这会导致测斜数据与实际变形存在偏差的情况。然而在测斜管施工时,由于一些因素无法做到测斜管导槽完全垂直与基坑方向,导致测斜数据不准确。
4.当前的基坑规模,一般为10到20米。相应的,测斜管埋设一般为20米到50米。部分项目甚至高达上百米。测斜管埋设得越深,测斜管在施工过程中的扭曲和不垂直的问题会更显著。由此带来的影响,即测斜仪测量不准确,会更加严重,深刻威胁到基坑变形监测的可靠性和安全性。由于从测斜管的施工工艺上去做到测斜管不扭曲并且完全垂直是不可能的,因此解决测斜管扭曲变形带来的测量数据偏差问题是迫在眉睫。
技术实现要素:
5.本发明的目的是提供一种深层水平位移测量的活动式测斜仪及方法,从测斜仪上入手,通过新的计算方案和仪器,解决测斜管发生扭曲时测斜仪测量数据存在偏差的问题,解决测斜管扭曲时当前行业内测斜仪测量数据不准确的问题。
6.为实现上述技术目的,本发明提供一种深层水平位移测量的活动式测斜仪,其具有线缆和测杆,所述测杆沿测斜管内的导槽布置,所述测斜管埋设在基坑中,所述线缆带动所述测杆在所述测斜管内作下放和上拉直线运动并形成单段测量距离l,其中:所述基坑的基坑坐标系为:垂直于所述基坑的x轴,平行于所述基坑的y轴,和垂直所述x轴和所述y轴的z轴;所述活动式测斜仪还包括上位机,所述测杆的内部安装有:倾角磁力计和倾角计,所述倾角磁力计和所述倾角计均采集角度数据并同所述上位机之间进行数据通信交互连接;在所述单段测量距离l内,所述倾角磁力计相对应测量所述测杆相对所述z轴的z轴旋转角θ,所述倾角计测量所述测杆分别相对所述x轴和所述y轴的x轴倾角α和y轴倾角β,所述上位机接收并依据所述单段测量距离l、所述x轴倾角α、所述y轴倾角β和所述z轴旋转角θ计算相对应的测斜管实际变形量a,所述测斜管实际变形量a的计算公式为:a=lsinα|cosθ|+lsinβ|sinθ|。
7.本发明提供一种测量深层水平位移测量的活动式测斜仪,从测斜仪上入手,解决
测斜管发生扭曲时测斜仪测量数据存在偏差的问题,通过获取x轴和y轴方向的倾角数据以及z轴方向上的旋转角数据,结合新的算法计算位移量。此方案的算法可以计算出测斜管朝任意方向变形时,垂直基坑方向上的位移量,完全解决测斜管扭曲时当前行业内测斜仪测量数据不准确的问题。
8.作为进一步的改进,所述测斜管实际变形量a为所述测斜管朝任意方向变形时垂直基坑方向的所述x轴上的位移量。
9.作为进一步的改进,所述计算公式适用于所述活动式测斜仪相对180
°
角度的正测量测斜管实际变形量和反测量测斜管实际变形量。
10.作为进一步的改进,所述上位机根据:(所述正测量测斜管实际变形量-所述反测量测斜管实际变形量)
÷
2,以消除误差并获得标定变形量。
11.作为进一步的改进,所述活动式测斜仪沿所述测斜管连续测量多个所述单段测量距离l,所述上位机计算获得多个相对应的所述标定变形量并计算生成测斜曲线。
12.作为进一步的改进,所述测杆的内部还安装有采集控制器,所述上位机通过与所述采集控制器的数据通信连接实现对所述倾角磁力计和所述倾角计的角度数据采集。
13.作为进一步的改进,所述上位机与所述采集控制器之间通过无线通信连接或rs232通讯线连接。
14.作为进一步的改进,所述测杆的顶部具有线缆接线端,所述线缆与所述线缆接线端相配合连接,所述线缆接线端与所述测杆顶部螺纹锁紧连接,所述测杆的底部安装有橡胶垫,所述线缆中包括:电源线和通讯线,所述线缆上具有标尺,所述标尺每隔一段有记号标记。
15.作为进一步的改进,所述倾角磁力计为三轴或单轴,以测量所述z轴旋转角θ,所述倾角计采用以下方案之一:两个单轴倾角计互相垂直安装,以实现其中一个测量所述x轴倾角α,另一个测量所述y轴倾角β;或一个双轴倾角计测量所述x轴倾角α和所述y轴倾角β;或一个三轴倾角计仅测量所述x轴倾角α和所述y轴倾角β。
16.相对应的,本发明还提供一种深层水平位移测量方法,其中:所述测量方法采用本发明所提供的一种深层水平位移测量的活动式测斜仪;所述上位机采集所述活动式测斜仪相对所述测斜管形成的所述单段测量距离l;所述上位机采集所述活动式测斜仪相对应所述单段测量距离l测量的所述x轴倾角α、所述y轴倾角β和所述z轴旋转角θ;所述上位机计算相对应所述单段测量距离l的所述测斜管实际变形量a,所述测斜管实际变形量a的计算公式为:a=lsinα|cosθ|+lsinβ|sinθ|。
17.作为进一步的改进,所述测量方法包括:初始化配对阶段、正向测量阶段、反向测量阶段,和计算生成测斜曲线阶段,所述正向测量阶段和所述反向测量阶段为相对180
°
角度的两次测量,所述正向测量阶段和所述反向测量阶段均包括连续测量多个所述单段测量距离l和相对应的多个所述测斜管实际变形量a,所述计算生成测斜曲线阶段中采取的标定变形量=(正测量所述测斜管实际变形量-反测量所述测斜管实际变形量)
÷
2,以消除误差。
18.作为进一步的改进,所述初始化配对阶段包括:步骤一:将所述测杆与所述线缆链接;步骤二:将所述线缆另一端连接至所述上位机;步骤三:所述上位机通电,选择测量方式;步骤四:将所述测杆竖直拿起,将所述测杆的高导轮方向垂直于所述基坑方向,通过所述上位机控制所述倾角磁力计归零;所述正向测量阶段包括:步骤五:将所述测杆的所述高
导轮朝向所述基坑放入所述测斜管内,并控制所述测杆下放至所述测斜管底部,静置至少10分钟;步骤六:提拉所述线缆并以所述线缆上的标尺的记号标记为准控制所述单段测量距离l,当所述标尺的第一个记号标记在所述测斜管的管口位置时,通过所述上位机控制开始测量,所述上位机实时解算并记录相对应的所述测斜管实际变形量a,每隔一个所述记号标记上拉一次,直至所述测杆上拉至管口,正向测量结束;所述反向测量阶段包括:步骤七:将所述测杆拿出,旋转180
°
放入所述测斜管内,控制所述测杆下放至所述测斜管底部,静置至少10分钟;步骤八:提拉所述线缆并以所述线缆上的标尺的记号标记为准控制所述单段测量距离l,当所述标尺的第一个记号标记在所述测斜管的管口位置时,通过所述上位机控制开始测量,所述上位机实时解算并记录相对应的所述测斜管实际变形量a,每隔一个所述记号标记上拉一次,直至所述测杆上拉至管口,反向测量结束;所述计算生成测斜曲线阶段包括:步骤九:所述上位机根据所述正向测量阶段和所述反向测量阶段测量记录的数据获得相对应的所述标定变形量,根据所述标定变形量计算生成测斜曲线。
19.本发明所述的测量方法和测斜仪解决了行业内现有的活动式测斜仪测量方法无法完全解决测斜管扭曲测量的问题,提高了测斜精确度。该发明提供了活动式测斜仪的测量流程。在使用活动式测斜仪测量时具有指导意义。
附图说明
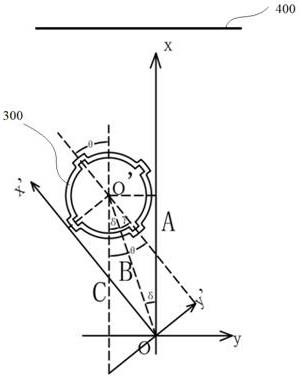
20.图1为本发明活动式测斜仪结构示意图;图2为本发明活动式测斜仪通信结构示意图;图3为本发明在第一种变形情况下的测量俯视示意图;图4为本发明在第二种变形情况下的测量俯视示意图;图5为本发明在第三种变形情况下的测量俯视示意图。
21.附图标记: 110-线缆、120-线缆接线端、130-测杆、140-采集控制器、150-倾角磁力计、160-倾角计、170-橡胶垫、180-电源线、190-通讯线、210-上位机、300-测斜管、400-基坑。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.如图1至图5所示,发明提供一种深层水平位移测量的活动式测斜仪,其具有线缆110和测杆130,所述测杆130沿测斜管300内的导槽布置,所述测斜管埋设在基坑400中,所述线缆110带动所述测杆130在所述测斜管内作下放和上拉直线运动并形成单段测量距离l,其中:所述基坑400的基坑坐标系为:垂直于所述基坑的x轴,平行于所述基坑的y轴,和垂直所述x轴和所述y轴的z轴;所述活动式测斜仪还包括上位机210,所述测杆130的内部安装有:倾角磁力计150和倾角计160,所述倾角磁力计150和所述倾角计160均采集角度数据并同所述上位机210之间进行数据通信交互连接;在所述单段测量距离l内,所述倾角磁力计150相对应测量所述测杆130相对所述z轴的z轴旋转角θ,所述倾角计160测量所述测杆130
分别相对所述x轴和所述y轴的x轴倾角α和y轴倾角β,所述上位机210接收并依据所述单段测量距离l、所述x轴倾角α、所述y轴倾角β和所述z轴旋转角θ计算相对应的测斜管实际变形量a,所述测斜管实际变形量a的计算公式为:a=lsinα|cosθ|+lsinβ|sinθ|。
24.本发明提供一种测量深层水平位移测量的活动式测斜仪,从测斜仪上入手,解决测斜管发生扭曲时测斜仪测量数据存在偏差的问题,通过获取x轴和y轴方向的倾角数据以及z轴方向上的旋转角数据,结合新的算法计算位移量。此方案的算法可以计算出测斜管朝任意方向变形时,垂直基坑方向上的位移量,完全解决测斜管扭曲时当前行业内测斜仪测量数据不准确的问题。
25.如图1和图2所示的实施例中,所述线缆与线缆接线端配套。所述线缆接线端与1测杆的顶部螺纹锁紧。所述采集控制器、所述倾角磁力计、所述倾角计安装在所述测杆内部。所述倾角计为微电子机械系统(mems)倾角计。所述橡胶垫安装至所述测杆底部。所述采集控制器与所述倾角磁力计和所述倾角计进行交互。所述采集控制器通过线缆与上位机进行交互。
26.如图3至图5所示的测量原理示意图中,本发明采用xy+z测量方式。具体分为三种变形情况。
27.采集控制器从mems倾角计和倾角磁力计采集到的数据为角度数据。倾角计x轴方向为α角,y轴方向为β角,倾角磁力计z轴方向为θ角。测斜管x轴方向位移量为x=lsinα,测斜管y轴方向位移量为y=lsinβ。l为测斜仪单段测量距离。图3至图5中xy坐标系为基坑的坐标系,x方向垂直于基坑,y方向平行于基坑;x’y’坐标系为测斜仪和测斜管坐标系。
28.测斜管在土体内不仅会沿着垂直基坑方向变形,也会沿着其他方向变形。图3情况一:为测斜管发生扭曲且沿基坑(x,-y)方向变形的情况。测斜管中心点o变化至o’。a为测斜管实际变形量,θ角为z轴旋转角即测斜管扭曲角度。此情况下计算方法公式推导:a=bcosδ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)γ+δ=θ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)将公式(2)带入公式(1)可得a=bcos(θ-γ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)因为cosγ=x/b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)sinγ=y/b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)将公式(4)和公式(5)带入公式(3)可得a=xcosθ+ysinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)即a=lsinαcosθ+lsinβsinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)根据基坑检测规范,需要进行正向测量和反向测量,而反向测量时则需要将测斜仪旋转180
°
,测斜仪所测得的位移量应为负值,此时倾角计测得的x轴和y轴角度为负值。
29.故此情况下正向测量和反向测量公式统一为:a=lsinα|cosθ|+lsinβ|sinθ|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)图4情况二:为测斜管发生扭曲且沿基坑(x,y)方向变形的情况。测斜管中心点o变化至o’。a为测斜管实际变形量,θ角为z轴旋转角即测斜管扭曲角度。
30.此情况下计算方法公式推导:a=bcosδ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)γ+δ+θ=90
°ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)将公式(9)带入公式(1)可得a=bcos(90
°‑
θ-γ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)因为cosγ=y/b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4’)sinγ=x/b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5’)将公式(4’)和公式(5’)带入公式(10)可得 a=xcosθ+ysinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)即a=lsinαcosθ+lsinβsinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)根据基坑检测规范,需要进行正向测量和反向测量,而反向测量时则需要将测斜仪旋转180
°
,测斜仪所测得的位移量应为负值,此时倾角计测得的x轴和y轴角度为负值。
31.故此情况下正向测量和反向测量公式统一为:a=lsinα|cosθ|+lsinβ|sinθ|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)图5情况三:为测斜管发生扭曲且沿基坑x轴方向变形的情况。测斜管中心点o变化至o’。a为测斜管实际变形量,θ角为z轴旋转角即测斜管扭曲角度。在情况三中a2=(lsinα)
2 +(lsinβ)2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)而 cosθ=lsinα/a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)sinθ=lsinβ/a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)因此将公示(12)和(13)带入公式(11)可得a=lsinαcosθ+lsinβsinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)同样根据基坑检测规范,需要进行正向测量和反向测量。故此情况下正向测量和反向测量公式统一为:a=lsinα|cosθ|+lsinβ|sinθ|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)综上,如图3至图5当采用本发明所述的测量方法时,不管是正向测量还是反向测量,不管测斜管朝哪个方向变形,测斜管在垂直基坑方向上的变形量都可以用同一个算法计算出来,即:a=lsinα|cosθ|+lsinβ|sinθ|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)现有技术中,当前行业内活动式测斜仪多采用单轴(x)或者双轴(x+y/x+z)的测斜仪测量方法。单轴(x轴)测斜仪不能解决测斜管扭曲的问题,而双轴(x+y/x+z)测斜仪仅仅只是在一定程度上解决测斜管扭曲的问题,即当测斜管仅沿着垂直基坑方向运动时,双轴(x+y/x+z)测斜仪可以计算出垂直基坑方向上的位移。但是,如果测斜管发生了平行于基坑方向的运动,双轴(x+y/x+z)测斜仪算法计算出的位移量会与真实变形存在一定的偏差,所以说双轴(x+y/x+z)测斜仪不能完全解决测斜管扭曲的问题。当测斜管发生扭曲时,行业内现有的单轴(x)测斜仪测量数据与真实数据存在偏差。2.当测斜管扭曲,并且没有沿垂直基坑方向的运动时,行业内现有的双轴测斜仪(x+y/x+z)测量数据与真实数据存在偏差。行业
内现有的双轴(x+y)测斜仪在算法计算方面较为复杂,且正反测量时,算法公式需要变更。
32.在情况一和情况二中,若采用常规的现有技术双轴(x+y/x+z)测斜仪的测量方法所计算出的测量值会与真值存在偏差。
33.情况一中,使用现有技术x+y轴测量方法计算出的测量值为b2=(lsinα)
2 +(lsinβ)2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)b为o-o’的长度,而如图3所示b>a。
34.情况一中,使用x+z轴测量方法计算出的测量值为c=lsinα/cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)c为δ角在y’轴上相交线长度,而如图3所示,c>a。
35.同理,在情况二中,x+y轴测量值b>a;x+z轴测量值c<a。现有技术中x+y测量方式和x+z测量方式仅在测斜管沿垂直基坑方向变形时测量准确。 而本发明的xy+z测量方式时,不管测斜管朝哪个方向变形,都可以用同一个算法计算出来测斜管在垂直基坑方向上的变形量。
36.只有本发明所述的测量方法可以真正解决测斜管扭曲导致的常规测斜仪测量值与实际变形值存在偏差的问题。通过获取x轴和y轴方向的倾角数据以及z轴方向上的旋转角数据,结合新的算法计算位移量。此方案的算法可以计算出测斜管朝任意方向变形时,垂直基坑方向上的位移量,a=lsinα|cosθ|+lsinβ|sinθ|完全解决测斜管扭曲时当前行业内测斜仪测量数据不准确的问题。
37.作为进一步的改进,所述测斜管实际变形量a为所述测斜管朝任意方向变形时垂直基坑方向的所述x轴上的位移量。
38.作为进一步的改进,所述计算公式适用于所述活动式测斜仪相对180
°
角度的正测量测斜管实际变形量和反测量测斜管实际变形量。
39.作为进一步的改进,所述上位机根据:(所述正测量测斜管实际变形量-所述反测量测斜管实际变形量)
÷
2,以消除误差并获得标定变形量。
40.作为进一步的改进,所述活动式测斜仪沿所述测斜管连续测量多个所述单段测量距离l,所述上位机计算获得多个相对应的所述标定变形量并计算生成测斜曲线。
41.作为进一步的改进,所述测杆130的内部还安装有采集控制器140,所述上位机210通过与所述采集控制器140的数据通信连接实现对所述倾角磁力计150和所述倾角计160的角度数据采集。
42.作为进一步的改进,所述上位机210与所述采集控制器140之间通过无线通信连接或rs232通讯线连接。
43.作为进一步的改进,所述测杆130的顶部具有线缆接线端120,所述线缆110与所述线缆接线端120相配合连接,所述线缆接线端120与所述测杆130顶部螺纹锁紧连接,所述测杆130的底部安装有橡胶垫170,所述线缆中包括:电源线180和通讯线190,所述线缆上具有标尺,所述标尺每隔一段有记号标记。
44.作为进一步的改进,所述倾角磁力计为三轴或单轴,以测量所述z轴旋转角θ,所述倾角计160采用以下方案之一:两个单轴倾角计互相垂直安装,以实现其中一个测量所述x轴倾角α,另一个测量所述y轴倾角β;或一个双轴倾角计测量所述x轴倾角α和所述y轴倾角β;或一个三轴倾角计仅测量所述x轴倾角α和所述y轴倾角β。
45.作为本发明优选的实施例,线缆为四芯线缆,两根供电线,两根通讯线,通讯方式为rs232通讯。线缆上每隔一段有记号标记。倾角磁力计可以是三轴,仅读取z轴数据;也可以是单轴z轴。倾角传感器可以是两个单轴倾角计互相垂直安装,一个测x轴数据一个测y轴数据;可以是一个双轴倾角计测x轴和y轴数据;也可以是一个三轴倾角计仅获取x轴和y轴数据。采集控制器仅采集mems倾角计和倾角磁力计的角度数据。上位机通过两根供电源线给采集控制器供电。上位机通过两根rs232通讯线接收采集控制器采集到的数据,并且通过rs232通讯线给采集控制器发送指令。上位机接收到采集控制器采集到的数据后根据测量方式进行不同的算法计算。
46.相对应的,本发明还提供一种深层水平位移测量方法,其中:所述测量方法采用本发明所提供的一种深层水平位移测量的活动式测斜仪;所述上位机210采集所述活动式测斜仪相对所述测斜管300形成的所述单段测量距离l;所述上位机210采集所述活动式测斜仪相对应所述单段测量距离l测量的所述x轴倾角α、所述y轴倾角β和所述z轴旋转角θ;所述上位机210计算相对应所述单段测量距离l的所述测斜管实际变形量a,所述测斜管实际变形量a的计算公式为:a=lsinα|cosθ|+lsinβ|sinθ|。
47.作为进一步的改进,所述测量方法包括:初始化配对阶段、正向测量阶段、反向测量阶段,和计算生成测斜曲线阶段,所述正向测量阶段和反向测量阶段为相对180
°
角度的两次测量,所述正向测量阶段和所述反向测量阶段均包括连续测量多个所述单段测量距离l和相对应的多个所述测斜管实际变形量a,所述计算生成测斜曲线阶段中采取的标定变形量=(正测量所述测斜管实际变形量-反测量所述测斜管实际变形量)
÷
2,以消除误差。
48.作为进一步的改进,所述初始化配对阶段包括:步骤一:将所述测杆与所述线缆链接;步骤二:将所述线缆另一端连接至所述上位机;步骤三:所述上位机通电,选择测量方式;步骤四:将所述测杆竖直拿起,将所述测杆的高导轮方向垂直于所述基坑方向,通过所述上位机控制所述倾角磁力计归零;所述正向测量阶段包括:步骤五:将所述测杆的所述高导轮朝向所述基坑放入所述测斜管内,并控制所述测杆下放至所述测斜管底部,静置至少10分钟;步骤六:提拉所述线缆并以所述线缆上的标尺的记号标记为准控制所述单段测量距离l,当所述标尺的第一个记号标记在所述测斜管的管口位置时,通过所述上位机控制开始测量,所述上位机实时解算并记录相对应的所述测斜管实际变形量a,每隔一个所述记号标记上拉一次,直至所述测杆上拉至管口,正向测量结束;所述反向测量阶段包括:步骤七:将所述测杆拿出,旋转180
°
放入所述测斜管内,控制所述测杆下放至所述测斜管底部,静置至少10分钟;步骤八:提拉所述线缆并以所述线缆上的标尺的记号标记为准控制所述单段测量距离l,当所述标尺的第一个记号标记在所述测斜管的管口位置时,通过所述上位机控制开始测量,所述上位机实时解算并记录相对应的所述测斜管实际变形量a,每隔一个所述记号标记上拉一次,直至所述测杆上拉至管口,反向测量结束;所述计算生成测斜曲线阶段包括:步骤九:所述上位机根据所述正向测量阶段和所述反向测量阶段测量记录的数据获得相对应的所述标定变形量,根据所述标定变形量计算生成测斜曲线。
49.在本发明优选的实施例中,该测量方法包括:步骤一:测斜仪与线缆接线端连接时要紧固可靠。
50.步骤二:线缆另一端与上位机连接时要紧固可靠。
51.步骤三:上位机测量方式可选,单向测量方式和正反测测量方式。
52.步骤四:测斜仪(测杆)高导轮为测斜仪的x轴方向,高导轮垂直朝向基坑,上位机控制倾角磁力计归零。
53.步骤五:手动控制测斜仪下放时要缓慢,测斜仪在测斜管底部静置10分钟,使测斜仪与测斜管内部温度相同。
54.步骤六:电缆线上的记号标记每次都应在测斜管口同个位置。
55.步骤七:测斜仪旋转180
°
时应顺着测斜管扭曲方向旋转。
56.步骤八:重复步骤六的操作。
57.步骤九:上位机记录的正反两次测量数据,根据(正测-反测)除以2来计算。以消除误差,并生成曲线。
58.本发明所述的测量方法和测斜仪解决了行业内现有的活动式测斜仪测量方法无法完全解决测斜管扭曲测量的问题,提高了测斜精确度。该发明提供了活动式测斜仪的测量流程。在使用活动式测斜仪测量时具有指导意义。
59.应了解本发明所要保护的范围不限于非限制性实施方案,应了解非限制性实施方案仅仅作为实例进行说明。本技术所要要求的实质的保护范围更体现于独立权利要求提供的范围,以及其从属权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1