一种基于北斗GNSS定位的土木工程变形自适应监测系统
一种基于北斗gnss定位的土木工程变形自适应监测系统
技术领域
1.本发明涉及一种基于北斗gnss定位的土木工程变形自适应监测系统,属于土木工程监测技术领域。
背景技术:
2.近年来随着我国经济快速发展,建设了大量的土木工程结构。由于设计缺陷、自然灾害或老化病害等原因,结构在服役中容易产生结构性损伤,其主要表现为变形逐步增大。若不能得到及时有效的监测与修复,在极端情况下易发生结构失效,造成国家和人民生命财产的极大损失。然而在偏远和艰险地区服役的结构日常的定期检测频率较低,难以充分满足结构健康安全监测的需求,传统的结构健康监测系统体型较为庞大,且在艰险环境中难以安装。
3.因此针对偏远地区和艰险环境中服役的结构,发明一种低成本、易安装、高精度、可实现大范围内安装使用的表面位移自适应无线监测系统具有非常重要的意义。
技术实现要素:
4.本发明所要解决的技术问题是提供一种基于北斗gnss定位的土木工程变形自适应监测系统,具有低成本、易安装、高精度的优点,对实现大范围内安装使用表面位移自适应无线监测系统具有非常重要的意义。
5.本发明为了解决上述技术问题采用以下技术方案:本发明设计了一种基于北斗gnss定位的土木工程变形自适应监测系统,包括控制子系统与现场子系统;其中,控制子系统包括无人机、电磁铁、检测控制终端、第一无线通讯模块;电磁铁连接无人机的底部,检测控制终端与第一无线通讯模块相连接;现场子系统包括装置箱体、至少一个磁吸件,以及设置于装置箱体内包含目标感知模块、第二无线通讯模块、电源模块的监测核心装置;其中,各磁吸件分别设置于装置箱体的表面,电源模块与目标感知模块相连接进行供电,目标感知模块与第二无线通讯模块相连接,目标感知模块用于执行对预设目标类型参数的感知检测;无人机所连电磁体在电控下、可分离式连接装置箱体表面的磁吸件,实现电磁体与装置箱体间的可分离式连接;基于第一无线通讯模块与第二无线通讯模块之间的无线通信连接,实现检测控制终端与目标感知模块之间的数据传输、指令收发。
6.作为本发明的一种优选技术方案:所述监测核心装置还包括由圆环、以及第一半圆环、第二半圆环组成的三轴自平衡支架,其中,第一半圆环两端间的距离与圆环的直径相适应,第一半圆环的两端分别活动连接圆环上直径对应的两位置,第一半圆环以其两端间连线为轴进行自由转动,第二半圆环两端间的距离与圆环的直径相适应,第二半圆环的两端分别活动连接圆环上直径对应的两位置,第二半圆环以其两端间连线为轴进行自由转动,且第一半圆环两端间连线与第二半圆环两端间连线相垂直,以及第一半圆环与第二半圆环彼此不接触;第二无线通讯模块置于目标感知模块上表面,电源模块置于目标感知模
块的下表面,且该三者整体结构置于第一半圆环内侧的中点位置;第二半圆环固定置于装置箱体内。
7.作为本发明的一种优选技术方案:所述监测核心装置还包括与目标感知模块相连接的gnss天线,gnss天线设置于目标感知模块的上表面中心位置,电源模块设置于目标感知模块下表面的中心位置,且gnss天线、目标感知模块、第二无线通讯模块、电源模块整体结构的质心位置与其形心位置重合,gnss天线所在直线位于第一半圆环所在面、且经过第一半圆环上中点位置,以及gnss天线工作端背向第一半圆环的内侧;目标感知模块根据来自gnss天线所获得的卫星观测数据、执行对预设目标类型参数的感知检测。
8.作为本发明的一种优选技术方案:所述监测核心装置还包括弹簧式电源触点、电源线组件,所述电源模块为电源管理芯片,所述装置箱体包括四块尺寸相同的等边三角形的光伏发电板,由四块光伏发电板以边边相连方式构成正四面体,即装置箱体,其中三块光伏发电板内侧面上的电能输出端分别一一对应连接各电源线上的一端,各电源线上的另一端汇聚至剩余一块光伏发电板的内侧面上、并连接剩余该块光伏发电板内侧面上的电能输出端,构成光伏电能输出端;所述三轴自平衡支架中第二半圆环外侧中点位置固定设置于各电源线所汇聚光伏发电板的内侧面上,弹簧式电源触点设置于第二半圆环中点位置,光伏电能输出端连接弹簧式电源触点的一端,弹簧式电源触点的另一端经电源线组件连接电源管理芯片,由电源管理芯片接收来自弹簧式电源触点输出的电能、并为目标感知模块进行供电;各磁吸件置于装置箱体正四面体的表面。
9.作为本发明的一种优选技术方案:针对所述非电源线汇聚的各光伏发电板上电能输出端所连电源线,各电源线分别以直线形式在其所对应光伏发电板内侧面进行走线、并直接延伸至电源线所汇聚的光伏发电板的内侧面上进行对接,所述三轴自平衡支架中第二半圆环所在面与各电源线所汇聚光伏发电板的内侧面相垂直。
10.作为本发明的一种优选技术方案:所述磁吸件的数量为四个,各磁吸件为彼此尺寸相同的正三角形,所述装置箱体正四面体的四个角分别切割尺寸与磁吸件尺寸相同的缺口,各磁吸件分别设置于装置箱体正四面体的四个角位置。
11.作为本发明的一种优选技术方案:所述各电源线汇聚的光伏发电板所面向的磁吸件表面采用区别于其他磁吸件表面的颜色进行区分。
12.作为本发明的一种优选技术方案:所述监测核心装置还包括充电电池模组,所述电源管理芯片与充电电池模组相连接,电源管理芯片设置于目标感知模块的下表面。
13.作为本发明的一种优选技术方案:所述电源线组件沿所述三轴自平衡支架中第二半圆环进行走线。
14.作为本发明的一种优选技术方案:所述监测核心装置还包括本地存储模块(119),所述目标感知模块与本地存储模块(119)相连接。
15.本发明所述一种基于北斗gnss定位的土木工程变形自适应监测系统,采用以上技术方案与现有技术相比,具有以下技术效果:本发明所设计一种基于北斗gnss定位的土木工程变形自适应监测系统,包括控制子系统与现场子系统,基于控制子系统中无人机经电磁方式与现场子系统之间的可分离式连接,由无人机针对现场子系统实现大范围吊运,并结合现场子系统与终端之间的无线通信传输,完成对各类型场地的土木工程的监测效率,并且在具体结构设计中,针对现场子系
统中用于容纳监测核心装置的装置箱体,采用正四面体形状设计,能够有效应用所设场景下不同平整度的地面,始终保持放置的稳定性,以及为监测核心装置在现场子系统的设置,提供三轴自平衡支架,保持监测核心装置自身姿态的稳定,此外进一步针对装置箱体的各面引入光伏发电板设计,为现场子系统提供更长续航能力的供电方式,此外合理规划各块光伏发电板电源线的走线,最大限度减少对现场子系统中天线信号的影响;整个技术方案具有低成本、易安装、高精度的优点,对实现大范围内安装使用表面位移自适应无线监测系统具有非常重要的意义;本发明所设计一种基于北斗gnss定位的土木工程变形自适应监测系统,克服了传统基于北斗gnss的土木工程变形监测设备体积庞大、艰险环境下难以布设、安装复杂和数据传输不便的问题;设计采用无人机吊装安装、可用于现场长期布设,并以无线方式接收指令、传输数据,克服了有线系统数据传输易受现场复杂环境干扰、线缆铺设与维护成本高昂、布线工作量大等问题;使用重力式三轴自平衡支架,可使北斗卫星观测天线自适应竖直向上,降低对现场的场地要求;采用四面体式太阳能电池板,极端情况下监测节点可翻转,保持持续的现场监测。
附图说明
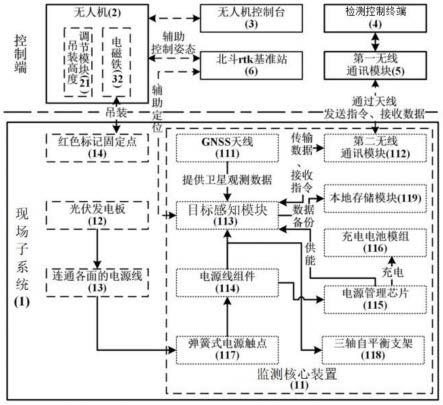
16.图1是本发明设计基于北斗gnss定位的土木工程变形自适应监测系统的应用示意图;图2是本发明设计中现场子系统结构示意图;图3是本发明设计中监测核心装置(11)的爆炸结构示意图;图4是发明设计基于北斗gnss定位的土木工程变形自适应监测系统的架构示意图。
17.其中,1. 现场子系统,11. 监测核心装置,111. gnss天线,112. 第二无线通信模块,113. 目标感知模块,114. 电源线组件,115. 电源管理芯片,116. 充电电池模组,117. 弹簧式电源触点,118. 三轴自平衡支架,12. 光伏发电板,13. 电源线,2. 无人机,21. 吊装高度调节模块,3. 无人机控制台,32. 电磁铁,4. 检测控制终端,5. 第一无线通讯模块,6. 北斗rtk基准站。
具体实施方式
18.下面结合说明书附图对本发明的具体实施方式作进一步详细的说明。
19.本发明设计了一种基于北斗gnss定位的土木工程变形自适应监测系统,实际应用当中,如图1所示,具体设计包括控制子系统与现场子系统1;其中,控制子系统包括无人机2、电磁铁32、检测控制终端4、第一无线通讯模块5;电磁铁32连接无人机2的底部,检测控制终端4与第一无线通讯模块5相连接。
20.如图2所示,现场子系统1包括装置箱体、至少一个磁吸件,以及设置于装置箱体内包含目标感知模块113、第二无线通讯模块112、电源模块的监测核心装置11;其中,各磁吸件分别设置于装置箱体的表面,电源模块与目标感知模块113相连接进行供电,目标感知模块113与第二无线通讯模块112相连接,目标感知模块113用于执行对预设目标类型参数的感知检测。
21.如图1和图4所示,无人机2所连电磁体32在电控下、可分离式连接装置箱体表面的磁吸件,实现电磁体32与装置箱体间的可分离式连接;基于第一无线通讯模块5与第二无线通讯模块112之间的无线通信连接,实现检测控制终端4与目标感知模块113之间的数据传输、指令收发。
22.实际应用中,无人机2基于卫星rtk基准站的定位,实现飞行控制,执行对现场子系统1的运输,并且关于无人机2通过电磁铁32对现场子系统1的吊运,针对无人机2,进一步设计加入吊装高度调节模块21,即在对现场子系统1吊运的同时,调节吊运高度。
23.针对所述监测核心装置11,在包含目标感知模块113、第二无线通讯模块112、电源模块的基础上,如图3所示,具体设计还包括由圆环、以及第一半圆环、第二半圆环组成的三轴自平衡支架118,其中,第一半圆环两端间的距离与圆环的直径相适应,第一半圆环的两端分别活动连接圆环上直径对应的两位置,第一半圆环以其两端间连线为轴进行自由转动,第二半圆环两端间的距离与圆环的直径相适应,第二半圆环的两端分别活动连接圆环上直径对应的两位置,第二半圆环以其两端间连线为轴进行自由转动,且第一半圆环两端间连线与第二半圆环两端间连线相垂直,以及第一半圆环与第二半圆环彼此不接触;第二无线通讯模块112置于目标感知模块113上表面,具体目标感知模块113通过sma母口接口连接第二无线通讯模块112,电源模块置于目标感知模块113的下表面,且该三者整体结构置于第一半圆环内侧的中点位置;第二半圆环固定置于装置箱体内。
24.如此设计通过圆环、以及第一半圆环各自彼此独立的自由转动,结合电源模块、及其与之相连各模块的重心,能够尽可能保持该整体结构姿态。
25.实际应用中,如图2和图3所示,进一步设计监测核心装置11还包括与目标感知模块113相连接的gnss天线111,gnss天线111设置于目标感知模块113的上表面中心位置,电源模块设置于目标感知模块113下表面的中心位置,且gnss天线111、目标感知模块113、第二无线通讯模块112、电源模块整体结构的质心位置与其形心位置重合,gnss天线111所在直线位于第一半圆环所在面、且经过第一半圆环上中点位置,以及gnss天线111工作端背向第一半圆环的内侧;目标感知模块113根据来自gnss天线111所获得的卫星观测数据、执行对预设目标类型参数的感知检测。
26.配合三轴自平衡支架118的设计,结合电源模块、及其与之相连各模块的重心,能够尽可能保持gnss天线111的向上姿态。
27.关于对监测核心装置11的供电,在实际应用中,如图2和图3所示,设计监测核心装置11还包括弹簧式电源触点117、电源线组件114,所述电源模块为电源管理芯片115,所述装置箱体包括四块尺寸相同的等边三角形的光伏发电板12,由四块光伏发电板12以边边相连方式构成正四面体,即装置箱体,其中三块光伏发电板12内侧面上的电能输出端分别一一对应连接各电源线上的一端,各电源线上的另一端汇聚至剩余一块光伏发电板12的内侧面上、并连接剩余该块光伏发电板12内侧面上的电能输出端,构成光伏电能输出端;所述三轴自平衡支架118中第二半圆环外侧中点位置固定设置于各电源线所汇聚光伏发电板12的内侧面上,弹簧式电源触点117设置于第二半圆环中点位置,具体采用弹簧式电源触点117镶嵌于三轴自平衡支架118第二半圆环中,用于保持变形现场子系统1在无人机抛洒或受到撞击时,仍可保持电源线组件114和光伏发电板12的可靠连接;光伏电能输出端连接弹簧式电源触点117的一端,弹簧式电源触点117的另一端经电源线组件114连接电源管理芯片
115,由电源管理芯片115接收来自弹簧式电源触点117输出的电能、并为目标感知模块113进行供电;各磁吸件置于装置箱体正四面体的表面。
28.实际应用当中,设计电源线组件114沿所述三轴自平衡支架118中第二半圆环进行走线;延续光伏发电板12对电源模块的设计,针对所述非电源线汇聚的各光伏发电板12上电能输出端所连电源线,各电源线分别以直线形式在其所对应光伏发电板12内侧面进行走线、并直接延伸至电源线所汇聚的光伏发电板12的内侧面上进行对接,所述三轴自平衡支架118中第二半圆环所在面与各电源线所汇聚光伏发电板12的内侧面相垂直。
29.关于正四面体装置箱体设计下各磁吸件的设计,进一步具体设计磁吸件的数量为四个,各磁吸件为彼此尺寸相同的正三角形,所述装置箱体正四面体的四个角分别切割尺寸与磁吸件尺寸相同的缺口,各磁吸件分别设置于装置箱体正四面体的四个角位置;并且设计各电源线汇聚的光伏发电板12所面向的磁吸件表面采用区别于其他磁吸件表面的颜色进行区分,诸如设计各电源线汇聚的光伏发电板12所面向的磁吸件为红色,其余磁吸件为白色,如此即可清晰的从装置箱体外观确定各电源线所汇聚光伏发电板12,如此在实际无人机对装置箱体的吊运过程中,即可通过对此颜色区分的磁吸件的电控磁吸,保持各电源线所汇聚光伏发电板12位于正下方,并在对装置箱体的放置中,将此光伏发电板12置于最下方摆放,如此设计,基于非电源线汇聚的各光伏发电板12上电能输出端所连电源线,各电源线分别以直线形式在其所对应光伏发电板12内侧面进行走线、并直接延伸至电源线所汇聚的光伏发电板12的内侧面上进行对接,如此在三轴自平衡支架118尽可能保持gnss天线111向上姿态的设计下,可以最大限度避免电源线经过gnss天线111的上方,则能够最大限度减小对gnss天线111工作的影响;并且在实际应用中,各磁吸件具体设计采用可磁吸的回火马氏体式的不锈钢制成。
30.配合光伏发电板12的应用,进一步设计监测核心装置11还包括充电电池模组116,所述电源管理芯片115与充电电池模组116相连接,电源管理芯片115设置于目标感知模块113的下表面,如此在对监测核心装置11实现光伏供电的同时,提供了电能储存设计,能够有效应用光线环境不好情况下的供电。
31.将上述所设计基于北斗gnss定位的土木工程变形自适应监测系统,应用于实际当中,所述监测核心装置11还包括本地存储模块(119),所述目标感知模块113与本地存储模块(119)相连接,在检测控制终端4与目标感知模块113之间以无线通讯方式进行数据传输、指令收发时,若无线通信信号不稳定时,则监测核心装置11中目标感知模块113即可将检测数据暂时存储至本地存储模块(119),待无线通信信号转好后,再将本地存储模块(119)中的检测数据转发至检测控制终端4,继续实现检测数据的回传,实际应用中,本地存储模块(119)采用tf卡方式。并且在实际应用当中,关于卫星数据的定位与传输,采用北斗卫星定位与数据传输,即诸如基于北斗rtk基准站6进行定位与数据传输,但是实际应用当中,关于卫星定位与数据传输,不局限于北斗,亦可以选择其他卫星定位方式。
32.将上述所设计基于北斗gnss定位的土木工程变形自适应监测系统,应用于实际当中,具体操作如下。
33.安装:无人机2的电磁铁32与现场子系统1的红色标记固定点(14)吸合,调节吊装高度调节模块21长度,使空吊时现场子系统1在空中稳定移动。使用无人机控制台3控制无人机2到达指定位置后降低无人机2高度,通过无人机下方摄像头传输回的图像数据进行释
放位置的精细调整后,无人机控制台3发出指令关闭电磁铁32电源,现场子系统1与无人机2脱离,无人机2飞离,现场子系统1安装完毕。
34.激活与现场测试:检测控制终端4通过第一无线通讯模块2,采用无线指令的方式将所设计现场子系统1从睡眠模式激活,并设置节点为测试模式。节点通过gnss天线111观测北斗卫星数据,位移智慧感知模块113对卫星观测数据进行粗解算,得到观测点位置的经纬度数据,并通过第二无线通讯模块112和第一无线通讯模块5传输回终端,现场测试结束,节点恢复休眠状态。若现场测试失败,则无人机2飞临现场子系统1上空,打开可控电磁铁32电源并使其吸住红色(14)或白色标记固定点(15),将现场子系统1带回。
35.指令下放:检测控制终端4通过第一无线通讯模块2,采用无线指令的方式将所设计现场子系统1从睡眠模式激活,并设置节点为监测模式,从等间隔长期监测和计次监测两种工作模式中选择,并设定监测时间间隔、监测次数信息(长期监测无此信息)。设置成功后,现场子系统1返回状态确认信息至检测控制终端4;实时监测:自适应监测节点1通过gnss天线111获得北斗卫星带时间戳观测数据,并同步获取北斗rtk基准站6的北斗卫星观测数据,并利用北斗rtk基准站6的数据对自适应监测节点1的观测结果进行校准,提高观测数据的精准度。利用校准后的北斗卫星观测数据解算当前点的高精度经纬度坐标与高程数据。
36.数据存储于回传:解算得到的高精度经纬度坐标与高程数据备份于本地存储模块(119)并通过无线方式发送回检测控制终端4,当无线传输失败时,标记传输失败数据,当无线传输信道恢复正常时,对标记数据再次传输,并清除相应标记。数据被传输回终端后,基于高精度经纬度坐标与高程数据解算现场子系统1的位移数据,并通过卡曼滤波等方法,对位移数据进行进一步的精度提高。
37.装置休眠:当计次监测模式下的现场子系统1采集足够次数的监测数据或等间隔长期监测模式下实时自动监测的现场子系统1收到终端的休眠指令时,监测任务结束,现场子系统1恢复休眠状态,等待下一次激活。
38.上述技术方案所设计一种基于北斗gnss定位的土木工程变形自适应监测系统,包括控制子系统与现场子系统1,基于控制子系统中无人机2经电磁方式与现场子系统1之间的可分离式连接,由无人机2针对现场子系统1实现大范围吊运,并结合现场子系统1与终端之间的无线通信传输,完成对各类型场地的土木工程的监测效率,并且在具体结构设计中,针对现场子系统1中用于容纳监测核心装置11的装置箱体,采用正四面体形状设计,能够有效应用所设场景下不同平整度的地面,始终保持放置的稳定性,以及为监测核心装置11在现场子系统1的设置,提供三轴自平衡支架118,保持监测核心装置11自身姿态的稳定,此外进一步针对装置箱体的各面引入光伏发电板12设计,为现场子系统1提供更长续航能力的供电方式,此外合理规划各块光伏发电板12电源线的走线,最大限度减少对现场子系统1中天线信号的影响;整个技术方案具有低成本、易安装、高精度的优点,对实现大范围内安装使用表面位移自适应无线监测系统具有非常重要的意义。
39.并且本发明设计系统,克服了传统基于北斗gnss的土木工程变形监测设备体积庞大、艰险环境下难以布设、安装复杂和数据传输不便的问题;设计采用无人机吊装安装、可用于现场长期布设,并以无线方式接收指令、传输数据,克服了有线系统数据传输易受现场复杂环境干扰、线缆铺设与维护成本高昂、布线工作量大等问题;使用重力式三轴自平衡支
架,可使北斗卫星观测天线自适应竖直向上,降低对现场的场地要求;采用四面体式太阳能电池板,极端情况下监测节点可翻转,保持持续的现场监测。
40.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1