基于近场干涉条纹法多光束间相位误差的测量装置和方法
1.本发明涉及光学测量装置和大型拍瓦级高功率脉冲激光系统领域,特别涉及一种适用于拍瓦级激光系统中的多光束间相位误差测量装置,可通用于需要测量多光束间相位误差的各类具有较低重复频率、较大光束口径、较长且复杂光路的高功率激光系统,同时可向下兼容较低功率、较长乃至连续激光领域多光束间的相位误差测量。
背景技术:
2.超强超短激光的出现与迅猛发展,为人类提供了前所未有的极端物理条件与全新实验手段,具有重大应用价值,是国际科技竞争重大前沿领域之一。超强超短激光装置的迅猛发展离不开关键元器件制造技术的支撑,其中最为关键的包括大口径激光晶体和非线性晶体的生长技术、大口径光栅刻蚀技术、高损伤阈值宽带镀膜技术。超强超短激光相干组束是突破关键元器件对超强超短激光发展的重要技术路径。
3.相干组束技术的关键在于精密控制多路子光束的相位一致性,使其在焦点处发生相干叠加,从而产生等效大口径光束的激光强度。经理论计算与实验验证,以双光束相干为例,相干叠加效率为90%时,相位同步精度达λ/20(134as)。对此,超强超短领域的各研究小组开展了飞秒激光相干组束相位控制技术的理论与实验研究,并取得了较为丰富的研究成果。2013年,chosrowjan等提出了一种基于相干条纹法的相位测量与控制方法,在实验上获得了rms值为λ/25的相位锁定结果[opt.lett.38,1277(2013)]。2014,bagayev等开展了基于opcpa结构随着激光技术和光学元器件生长技术的发展的双光束相干组束实验,该实验采用了能量偏振法(hansch
–
couillasud detector)进行束间相位误差测量,最终实现了rms值为λ/23.6的相位锁定[opt.lett.39,1517(2014)]。2016年,mu等提出采用单脉冲互相关法用于双光束间相位误差的测量,并在实验上验证了其可行性[opt.lett.41.234(2016)]。同年,cui等人提出了一种互相关法和能量偏振法的高精度、大量程相位误差测量方法,并在实验上取得了rms值为λ/18.6的相位误差锁定[ieee photonics technolo.lett.28,2215(2016)]。然而这些相位控制技术均为双光束间相位控制技术,对于多光束相干组束系统而言,采用上述测量方法只能通过分别测量每两个光束间的相位误差实现。这将大大增加多光束组束系统的相位测量装置的个数和系统的复杂性,为系统实现带来了极大困难和风险。因此,发展适用于拍瓦级激光系统的、结构简单的多光束间相位误差测量方法迫在眉睫。
技术实现要素:
[0004]
本发明的目的是为了实现拍瓦级高功率激光系统中多光束间相位误差的实时精密测量,从而使拍瓦级高功率激光系统的多光束相干组束成为可能。本发明提一种基于近场干涉条纹法的多光束间相位误差的测量装置和方法,通过一个探测装置,实现多光束间的相位误差测量,适用于拍瓦级超强超短激光相干组束系统,同时适用于较小功率激光系统中的多光束间相位误差测量。
[0005]
为了实现上述发明目的,本发明的技术解决方案如下:
[0006]
一方面,本发明提供一种基于近场干涉条纹法多光束间相位误差的测量装置,其特点在于,包括调节镜组、第一定位光阑、光路折叠镜组、第一定位光阑、衰减镜、光斑采集ccd和计算机;
[0007]
从高功率激光系统中引出的待测光经所述调节镜组准直后,经第一定位光阑入射至光路折叠镜组,经光路折叠镜组延长后入射至衰减镜,经该衰减镜衰减后入射到光斑采集ccd;
[0008]
微调所述的调节镜,使得待测光的子光束发生干涉,计算机对ccd采集到的干涉条纹图样进行处理,提取待测多光束间的相位误差。
[0009]
所述的待测光为飞秒激光或任意波长的激光,由双光束或任意多光束组成。
[0010]
所述调节镜组由n个平行放置的反射镜组成,n为所述待测光(1)的子光束数量,用于调节各子光束的指向性。
[0011]
所述光路折叠镜组由多个反射镜组成,用于将光路折叠,使得光路延长。
[0012]
另一方面,本发明还提供一种基于近场干涉条纹法多光束间相位误差的测量方法,其特点在于,该方法包括如下步骤:
[0013]
步骤1、构建权利要求1所述的测量装置;
[0014]
步骤2、调节所述调节镜组,使得光斑采集ccd中各子光束重合并产生干涉条纹;
[0015]
步骤3、利用计算机观测相位,根据干涉图在ccd中的位置,输入位置坐标,截取光斑采集ccd中干涉条纹图样的一维数据,进行傅里叶运算,傅里叶变换信息中的一阶信号中包含了两两子光束间的相位差信息,获取傅里叶变换后的频谱图;
[0016]
步骤4、用挡光板遮挡不同子光束,寻找第2、3
…
n路子光束分别与第1路子光束对应的尖峰,并从尖峰对应的傅里叶变换信息的复数值中提取相位信息。
[0017]
所述的待测光为飞秒激光或任意波长的激光;
[0018]
所述的待测光为高功率激光或较低功率的激光;
[0019]
所述的待测光由双光束或任意多光束组成;
[0020]
与现有技术相比,本发明的有益效果是:
[0021]
1)采用一个探测装置,实现多光束间的相位误差的同时测量;
[0022]
2)该方法适用于拍瓦级超强超短激光相干组束系统,同时适用于较小功率激光系统中的多光束间相位误差测量。
[0023]
3)具有结构简单、实用性强、稳定性高、精度高等特点。
附图说明
[0024]
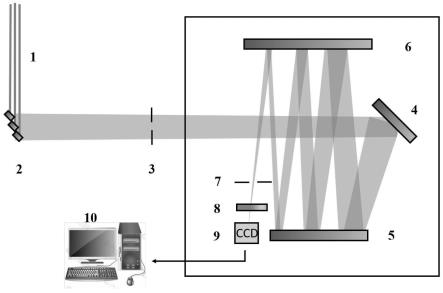
图1是本发明实施例三光束间相位误差测量装置的整体结构示意图
[0025]
图2是采用本发明实施例三光束间相位误差测量装置的结果示意图,其中,a为ccd采集得到的干涉条纹图样,b为从干涉图样中截取得到的一维数据,c为b中一维数据傅里叶变换频谱图。
具体实施方式
[0026]
下面结合附图和实施例对本发明进行详细的说明,但不应以此限制本发明的保护
范围。
[0027]
图1是本发明实施例三光束间相位误差测量装置的整体结构示意图,如图所示,从高功率激光系统中引出的待测光1,经调节镜2,定位光阑3、7,光路折叠镜4、5、6,衰减镜8,光斑采集ccd 9,计算机及测量软件10。
[0028]
实施例以三光束间相位误差测量系统为例来说明具体实施过程:
[0029]
该装置(如图1所示)
[0030]
所述的运用计算机编写的具有采集与驱动控制软件10可以使所述的高功率激光系统中的多光束相位误差测量装置执行如下步骤:
[0031]
步骤1、所述的待测光1由主激光系统中分束得到,待测光为三束子光束;所述的待测光束调节镜2由三个激光反射镜组成,通过待测光束调节镜2分别对三个待测子光束的指向性进行调节,使之与定位光阑3、7重合,并使之以此经过光路折叠镜4、5、6和衰减片8,入射进光斑采集ccd9;
[0032]
步骤2、通过计算机及测量软件10,观察光斑采集ccd9中的光斑图像,并调节上述待测光束调节镜2中的三个反射镜,使得光斑采集ccd9中的三个子光束重合并产生干涉条纹,如图2a所示;
[0033]
步骤3、在计算机及测量软件10中,观测相位输入合理数据,截取光斑采集ccd9中干涉条纹图样的一位数据,如图2b,并运行测量软件,对得到的一维数据进行傅里叶运算,如图2c。傅里叶变换信息中的一阶信号中包含了两两子光束间的相位差信息。
[0034]
步骤4、通过遮挡不同子光束,在图2c中寻找第一二路和第一三路对应的尖峰,从尖峰对应的复数值中提取相位信息。
[0035]
最后应当说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1