一种强干扰下旋转机械特征频率提取方法
1.本发明属于大数据学习模型领域,具体涉及一种强干扰下旋转机械特征频率提取方法。
背景技术:
2.泵、水轮机和螺旋桨等属于典型的水力旋转机械,其运行工程中难免产生流致故障。螺旋桨产生的叶尖涡空化、轴流泵叶顶间隙空化、水轮机尾水管涡带等异常流动通常会诱导产生振动等伴随现象。振动信号携带有大量流致故障信息。水力旋转机械运行过程所激励的轴频和叶频等特征信号具有典型的低频特征。在复杂工作条件下,这些特征通常会被强烈的背景噪音污染且为多频特征信息的叠加。因此,有必要通过信号分解来提取故障特征。如何在低信噪比条件下准确实现振动信号的解调是水力旋转机械故障诊断和目标识别的关键步骤。
3.针对这个问题设计了各种方法,如小波分解、小波包分解、经验模态分解(emd)和局部均值分解(lmd)等。但是,小波分解和小波包分解是非自适应信号分析方法,因为小波基函数是预先选择的。虽然emd和lmd是自适应信号处理方法,但由于存在模式混合,它们的应用受到限制。集成emd和集成lmd等噪声辅助技术在一定程度上缓解了模式混合问题,但计算复杂度急剧增加,无法有效消除添加的白噪声
4.变分模态分解(vmd)是近年来提出的一种新颖的自适应信号分解方法。凭借其严谨的数学理论指导、较快的收敛速度、强噪声鲁棒性强,有效避免分解中的端点效应、过包络、欠包络等优势,被广泛应用于故障诊断领域。然而,vmd分解的效果高度依赖分解模数k和平衡参数alpha。目前还没有决定这两个参数的统一方法。
5.尽管一些研究提出了结合优化算法和适应度函数的改进vmd方法,但大部分方法都对alpha与k同时进行优化,导致所有子模态共享同一个alpha值。由于不同子模态具有不同带宽特性,共用alpha导致出现不合理的欠分解或过分解。
技术实现要素:
6.为克服vmd应用中分解模态个数设置困难、所有模态共用平衡参数的问题,本发明借鉴emd递归分解思想自适应确定分解模数k,结合麻雀搜索寻优算法对每次分解的平衡参数a进行局部寻优,综合前两者提出优化递归vmd的流体机械流致振动解调方法。
7.为了实现上述目的,本发明提供以下技术方案:
8.本发明提供一种强干扰下旋转机械特征频率提取方法,包括:
9.s1:将采集到的振动信号设置为残差信号,对残差信号执行vmd操作;
10.s2:设置参考模态u
ref
,并计算参考模态u
ref
的峭度
11.s3:设置平衡参数α的标定测试点,并对每个标定测试点进行vmd分解后,计算其分解模态u
′
与参考模态的信号序列u
ref
之间的相关参数;
12.s4:通过判断相关系数减少平衡参数α的标定测试点数量进一步缩小最优
平衡参数α
最优
所在区间,减少不必要的vmd操作;
13.s5:根据分解信号的特征细化平衡参数α的寻优区间;
14.s6:确定寻优的适应度函数;
15.s7:在细化后的平衡参数α的寻优区间内采用麻雀搜索优化算法-(ssa)来选择目标模态的最优平衡参数α
最优
;
16.s8:利用步骤s7中寻找的最优平衡参数α
最优
的值以及设置分解模数k=1进行vmd操作,提取唯一的分解模态为ue′
;
17.s9:残差信号去除步骤s8中提取的唯一的分解模态ue′
后形成新的残差信号;
18.s10:利用步骤s8中提取的唯一的分解模态ue′
进行信号重构;
19.s11:基于重构信号和原始信号之间的功率谱相似性来判断是否继续进行下一次模态分解的迭代。
20.进一步的,步骤(2)中设置参考模态u
ref
的步骤为:
21.初始化平衡参数α
初
的取值设置为c,分解模数k设置为1,提取到的唯一模态作为参考模态u
ref
;
22.参考模态u
ref
的峭度的计算公式为:
[0023][0024]
其中,u
ref
,n,分别是参考模态的信号序列、模态的采样个数以及参考模态的时域信号平均值。
[0025]
进一步的,步骤s3的具体过程为:
[0026]
在初始化平衡参数α
初
的取值设置为c时,平衡参数α的取值在c以内时,其对信号分解结果的影响更大;因此,在c到10*c区间内选取较大的平衡参数α间隔;在c以内,选取较小的平衡参数α间隔,组成标定集合α
′
;每一次选取不同平衡参数α的值进行vmd分解时,分解模数k始终设置为1,分解模态记为u
′
,每次分解后计算其分解模态u
′
相关参数,包括:
[0027]
分解模态u
′
与参考模态的相关系数
[0028][0029]
分解模态u
′
的峭度kuru′
:
[0030][0031]
分解模态u
′
的包络谱峭度esku′
:
[0032][0033]
分解模态u
′
的峭度与包络熵比值kseu′
:
[0034]
[0035]
其中,
[0036]
in以e为底数的对数;
[0037]
是参考模态u
ref
信号序列的平均值;
[0038]
是分解模态u
′
的平均值;
[0039]
esu′
(ω)是u
′
在频率ω上的包络谱
[0040]eu
′
(j)是分解模态u
′
经hilbert解调后得到的包络信号序列eu′
的离散点;
[0041]
pj是eu′
(j)的归一化形式;
[0042]
j表示包络信号序列eu′
的采样点;
[0043]
j是包络信号序列eu′
中位于j值的采样点。
[0044]
进一步的,步骤s4中缩小最优平衡参数α
最优
所在区间的过程为:
[0045]
当对某个平衡参数α的标定测试点进行vmd操作后,如果相关系数大于0.95时,则保留该平衡参数α的标定测试点,否则,则认为分解的信号与参考模态拥有的中心频率完全不同,该平衡参数α的标定测试点作为细化后平衡参数α的寻优区间的其中一个边界,后续将不再对跨越边界的其他标定测试点进行vmd操作,边界内的剩余几个标定测试点组成新的寻优区间;
[0046]
剔除多余的平衡参数α的标定测试点是从靠近平衡参数α=c的标定测试点开始,直到满足s3中的停止。可以保证所选平衡参数α的寻优区间既能包含全局最优平衡参数α
最优
,又能减少多余的vmd操作,提高算法的计算性能。
[0047]
进一步的,步骤s5中细化平衡参数α的寻优区间的规则为:
[0048]
如果参考模态u
ref
的峭度则认为提取的分解模态u
′
具有明显地冲击特性,此时在边界内剩余几个平衡参数α的标定测试点所对应的分解模态u
′
的包络谱峭度kseu′
寻找其中的最大值;
[0049]
如果参考模态u
ref
的峭度则在边界内剩余几个平衡参数α的标定测试点所对应的分解模态u
′
的包络谱峭度esku′
寻找其中的最大值;以最大值对应的平衡参数α的值为中心,在标定测试点集合α
′
中各向左和右移动一位,对应的两个平衡参数α的值形成最终细化后的平衡参数α的寻优区间。
[0050]
进一步的,步骤s6的具体过程为:
[0051]
如果则认为提取的分解模态u
′
具有明显地冲击特性,此时选择最大kseu′
作为寻优的适应度函数;
[0052]
如果选择最大esku′
作为寻优的适应度函数;
[0053]
寻优的适应度函数fitness
esk
为:
[0054][0055]
其中,esk(uk)是寻优空间内进行寻优所得的分解模态uk对应的包络谱峭度;uk是在细化后的寻优空间内进行寻优所得的一个分解模态;
[0056]
kse(uk)是寻优空间内进行寻优所得的分解模态uk对应的峭度与包络熵的比值。
[0057]
进一步的,步骤s7的具体过程为:
[0058]
s71:随机初始化麻雀种群并定义相关参数,定义最大迭代次数。
[0059][0060]
其中,d表示优化问题变量的维数,n是麻雀的数量;x代表麻雀种群的位置;
[0061]
s72:计算初始种群的适应度并将其排序进而选择出当前最优值和最差值。
[0062][0063]
其中,f由步骤s6中确定的适应度函数确定;
[0064]
s73:更新发现者的位置,公式如下:
[0065][0066]
其中,m表示第m个麻雀;
[0067]
t代表当前迭代数,n=1,2,3,
…
,d;iter
max
为设置的最大迭代次数;x
m,n
表示第m个麻雀在第n维中的位置信息;σ∈(0,1]是一个随机数;r2和st分别表示预警值和安全值,其中r2∈(0,1],st∈(0.5,1];q表示服从正态分布的随机数;l表示一个1
×
d的矩阵,其中该矩阵内每个元素全部为1;
[0068]
当r2《st时,表示此时觅食环境周围没有捕食者,发现者可以在更大的范围内进行搜索;
[0069]
当r2≥st,说明种群中部分麻雀发现了捕食者,并向种群中其它麻雀发出警报,此时所有麻雀都需要迅速飞到其它安全地方进行觅食;
[0070]
s74:更新加入者的位置,公式如下:
[0071][0072]
其中,x
p
是目前发现者所占据的最优位置,x
worst
表示当前全局最差的位置;a表示一个1
×
d的矩阵,其中每个元素随机赋值为1或-1,并且规定a
+
=a
t
(aa
t
)-1
;
[0073]
当m》n/2时,表明适应度值较低的第m个加入者需要及时飞往其它地方觅食,以获得更多的能量;
[0074]
s75:更新意识到危险的麻雀位置,公式如下:
[0075][0076]
其中,x
best
是当前的全局最优位置;β作为步长控制参数,为服从正态分布的0-1之间的随机数;q是-1到1的随机数,funm则是当前麻雀个体的适应度值,fung和funw分别是当
前全局最佳和最差的适应度值;ε是最小的常数,以避免分母为零;
[0077]
当funi》fung,表示此时的麻雀正处于种群的边缘,极其容易受到捕食者的攻击;x
best
表示种群中最安全的位置;funi=fung时,表明处于种群中间的麻雀意识到了危险,需要靠近其它的麻雀以此尽量减少它们被捕食的风险;q表示麻雀移动的方向同时也是步长控制参数;
[0078]
s76:获得当前最优值,如果当前最优值比上一次迭代的最优值好的话就进行更新操作,否则不进行更新操作,并继续进行迭代操作直到满足条件为止;最终得到全局最优值和最佳适应度值。
[0079]
进一步的,所述信号重构函数f
′
为:
[0080][0081]
进一步的,所述步骤s11的判断依据为:
[0082]
设置原始信号的功率谱为psf,公式为:
[0083]
psf=|f|2;
[0084]
设置重构信号功率谱为psf′
,公式为:
[0085]
psf′
=|f
′
|2;
[0086]
其中,f是原始信号的时间序列;
[0087]
重构信号和原始信号之间的功率谱相似性系数为:
[0088][0089]
其中,是原始信号功率谱的均值;i是迭代总次数;
[0090]
q是迭代次数;
[0091]
如果大于阀值0.9,则迭代停止;
[0092]
如果小于等于阀值0.9,则迭代继续,返回步骤s1继续进行;
[0093]
其中,阈值0.9是根据经验得出,阈值的具体不做限定,阈值0.9是最优的状态。
[0094]
本发明具有以下有益效果:
[0095]
(1)本发明为克服vmd应用中分解模态个数设置困难、所有模态共用平衡参数的问题,借鉴emd递归分解思想提出了一种强干扰下旋转机械特征频率提取方法。
[0096]
(2)本发明基于设置的参考模态相关性粗略定位vmd分解中最优平衡参数α
最优
所在区间,结合麻雀搜索寻优算法对每次分解的平衡参数α进行局部寻优。
[0097]
(3)本发明在选择最优平衡参数α
最优
所在区间时通过从标定测试点开始,然后依选择次标定测试点进行左右各进行1次测试的方式,保证所选平衡参数α的寻优区间既能包含全局最优平衡参数,又能减少多余的vmd操作,提高算法的计算性能。
[0098]
(4)本发明通过迭代分解次数自适应确定分解模数k,采用的改进递归vmd方法避免了提前不准确预设分解数和平衡参数对分解效果的影响。
[0099]
(5)将本发明应用在构造的仿真信号中实现了vmd方法所能达到的最优分解效果,同时应用在泵空化流致振动信号处理中,成功实现了低信噪比条件下流体机械流致振动特征频率的有效提取。
附图说明
[0100]
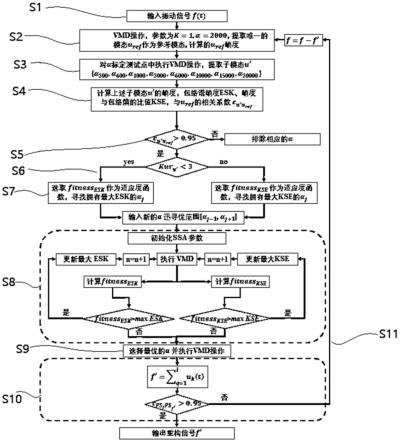
图1为实施例1的提取方法的流程示意图。
[0101]
图2为实施例1所构造的谐波信号x1(t)仿真信号频谱图。
[0102]
图3为实施例1所构造的可变频率的多分量调制信号x2(t)仿真信号频谱图。
[0103]
图4为实施例1所构造的随机脉冲c1(t)仿真信号频谱图。
[0104]
图5为实施例1所构造的故障引起的周期性瞬态脉冲c2(t)仿真信号频谱图。
[0105]
图6为实施例2中添加高斯白噪声后所构造的随机脉冲c1(t)仿真信号频谱图。
[0106]
图7为实施例2中添加高斯白噪声后所构造的故障引起的周期性瞬态脉冲c2(t)仿真信号频谱图。
[0107]
图8为实施例2中添加高斯白噪声后所构造的谐波信号x1(t)仿真信号频谱图。
[0108]
图9为实施例2中添加高斯白噪声后所构造的可变频率的多分量调制信号x2(t)仿真信号频谱图。
[0109]
图10为实施例2中添加高斯白噪声后所构造的仿真信号频谱图。
[0110]
图11为实施例2中添加高斯白噪声后所构造的仿真信号频谱图。
[0111]
图12为应用谱峭度方法对实施例2中含噪声的新信号进行解调图。
[0112]
图13为应用传统vmd方法以k=4、初始平衡参数α
初
=2000进行的分解结果中第1个模态。
[0113]
图14为应用传统vmd方法以k=4、初始平衡参数α
初
=2000进行的分解结果中第2个模态。
[0114]
图15为应用传统vmd方法以k=4、初始平衡参数α
初
=2000进行的分解结果中第3个模态。
[0115]
图16为应用传统vmd方法以k=4、初始平衡参数α
初
=2000进行的分解结果中第4个模态。
[0116]
图17为泵空化下采集的振动信号图。
[0117]
图18为泵没有空化下采集的振动信号图。
[0118]
图19为应用本发明所提方法对实施例3中泵空化工况下采集的振动信号对应子模态的频域以及对应的包络谱图。
[0119]
图20为应用本发明所提方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代1次分解后对应子模态的频域以及对应的包络谱图。
[0120]
图21为应用本发明所提方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代2次分解后对应子模态的频域以及对应的包络谱图。
[0121]
图22为应用本发明所提方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代3次分解后对应子模态的频域以及对应的包络谱图。
[0122]
图23为应用本发明所提方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代4次分解后对应子模态的频域以及对应的包络谱图。
[0123]
图24为应用本发明所提方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代5次分解后对应子模态的频域以及对应的包络谱图。
[0124]
图25为应用本发明所提方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代6次分解后对应子模态的频域以及对应的包络谱图。
[0125]
图26为应用传统vmd方法对实施例3中泵空化工况下采集的振动信号对应子模态的频域以及对应的包络谱图。
[0126]
图27为应用传统vmd方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代1次分解后对应子模态的频域以及对应的包络谱图。
[0127]
图28为应用传统vmd方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代2次分解后对应子模态的频域以及对应的包络谱图。
[0128]
图29为应用传统vmd方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代3次分解后对应子模态的频域以及对应的包络谱图。
[0129]
图30为应用传统vmd方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代4次分解后对应子模态的频域以及对应的包络谱图。
[0130]
图31为应用传统vmd方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代5次分解后对应子模态的频域以及对应的包络谱图。
[0131]
图32为应用传统vmd方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代6次分解后对应子模态的频域以及对应的包络谱图。
具体实施方式
[0132]
以下结合附图对本发明的具体实施方式做详细描述,应当指出的是,实施例只是对发明的具体阐述,不应视为对发明的限定,实施例的目的是为了让本领域技术人员更好地理解和再现本发明的技术方案,本发明的保护范围仍应当以权利要求书所限定的范围为准。
[0133]
为克服vmd应用中分解模态个数设置困难、所有模态共用平衡参数的问题,本发明借鉴emd递归分解思想自适应确定分解模数k,结合麻雀搜索寻优算法对每次分解的平衡参数alpha进行局部寻优,综合前两者提出优化递归vmd的流体机械流致振动解调方法。
[0134]
实施例1
[0135]
如图1所示,本发明提供一种强干扰下旋转机械特征频率提取方法,包括:
[0136]
s1:将采集到的振动信号设置为残差信号,对残差信号执行vmd操作;
[0137]
如图2-5所示,输入振动信号f(t),构造一个多分量调幅调频信号,说明本发明在信号分解上的抗模态混叠特性和噪声鲁棒性上的优势;同时,为了体现改进vmd方法在变频多分量调制信号上的分解优势,采用其他算法和本发明方法对分别对同一信号进行分解;
[0138]
构造信号的公式如下:
[0139][0140]
其中x1(t)表示谐波信号,f1表示25hz的轴频率;x2(t)表示具有可变频率的多分量调制信号;f2为200hz的信号频率;c1(t)用于模拟泵体附近气泡破裂引起的随机脉冲;f
c1
为
3000hz的谐振频率;a属于0-2之间的随机数;c2(t)代表可能由轴和轴承系统故障引起的周期性瞬态脉冲;采样频率和信号数量分别设置为20khz和1s;设计的周期谐波和冲击信号的特征频率均为25hz,而随机脉冲信号的特征频率为200hz。
[0141]
s2:设置参考模态u
ref
,并计算参考模态u
ref
的峭度
[0142]
初始化平衡参数α
初
的取值设置为2000,分解模数k设置为1,提取到的唯一模态作为参考模态u
ref
,方便测试后续每个分解模态u
′
与参考模态u
ref
的相关性;
[0143]
参考模态u
ref
的峭度的计算公式为:
[0144][0145]
其中,u
ref
,n,分别是参考模态的信号序列、模态的采样个数以及参考模态的时域信号平均值。
[0146]
s3:设置平衡参数α的标定测试点,并对每个标定测试点进行vmd分解后,计算其分解模态u
′
相关参数;
[0147]
在初始化平衡参数α
初
的取值设置为2000时,平衡参数α的取值在2000以内时,其对信号分解结果的影响更大;因此,在2000-20000区间内选取较大的平衡参数α间隔,具体为α=6000、α=10000、α=15000、α=20000;在2000以内,选取较小的平衡参数α间隔,具体为α=1000、α=600和α=200分别测试分解结果;标定集合α
′
=[200,600,1000,2000,6000,10000,15000,20000];每一次选取不同平衡参数α的值进行vmd分解时,分解模数k始终设置为1,分解模态记为u
′
,每次分解后计算其分解模态u
′
相关参数,包括:
[0148]
分解模态u
′
与参考模态的相关系数
[0149][0150]
分解模态u
′
的峭度kuru′
:
[0151][0152]
分解模态u
′
的包络谱峭度esku′
:
[0153][0154]
分解模态u
′
的峭度与包络熵比值kseu′
:
[0155][0156]
其中,
[0157]
in是以e为底数的对数;
[0158]
是参考模态u
ref
信号序列的平均值;
[0159]
是分解模态u
′
的平均值;
[0160]
esu′
(ω)是u
′
在频率ω上的包络谱;
[0161]eu
′
(j)是分解模态u
′
经hilbert解调后得到的包络信号序列eu′
的离散点;
[0162]
pj是eu′
(j)的归一化形式;
[0163]
j表示包络信号序列eu′
的采样点;
[0164]
j是包络信号序列eu′
中位于j值的采样点。
[0165]
s4:通过判断相关系数减少α的标定测试点数量进一步缩小最优平衡参数α
最优
所在区间,减少不必要的vmd操作;
[0166]
当对某个平衡参数α的标定测试点进行vmd操作后,如果相关系数大于0.95时,则保留该平衡参数α的标定测试点,否则,则认为分解的信号与参考模态拥有的中心频率完全不同,该平衡参数α的标定测试点作为细化后平衡参数α的寻优区间的其中一个边界,后续将不再对跨越边界的其他标定测试点进行vmd操作,边界内的剩余几个标定测试点组成新的寻优区间;
[0167]
剔除多余的平衡参数α的标定测试点是从靠近平衡参数α=2000的标定测试点开始,即采取左右各进行1次测试的方式从平衡参数α=2000逐渐扩大最优平衡参数α
最优
的寻优范围,直到满足s3中的停止;具体先后顺序为α=[2000,1000,6000,600,10000,200,15000,20000]。这样可以保证所选平衡参数α的寻优区间既能包含全局最优平衡参数α
最优
,又能减少多余的vmd操作,提高算法的计算性能。
[0168]
通过计算,剩余的平衡参数α的标定测试点为α=[600,1000,2000,6000,10000,15000,20000],α=600被剔除;
[0169]
s5:根据分解信号的特征细化平衡参数α的寻优区间;
[0170]
如果参考模态u
ref
的峭度则认为提取的分解模态具有明显地冲击特性,此时在边界内剩余几个平衡参数α的标定测试点所对应的分解模态的包络谱峭度kseu′
寻找其中的最大值;
[0171]
如果参考模态u
ref
的峭度则在边界内剩余几个平衡参数α的标定测试点所对应的分解模态的包络谱峭度esku′
寻找其中的最大值;以最大值对应的平衡参数α的值为中心,在标定测试点集合α
′
中各向左和右移动一位,对应的两个平衡参数α的值形成最终细化后的平衡参数α的寻优区间;
[0172]
经计算:最大的esku′
=1456,由平衡参数α=6000,因此细化后的平衡参数α的寻优空间为α=[2000,10000]。
[0173]
s6:确定寻优的适应度函数;
[0174]
如果则认为提取的分解模态具有明显地冲击特性,此时选择最大kseu′
作为寻优的适应度函数;
[0175]
如果选择最大esku′
作为寻优的适应度函数;寻优的适应度函数fitness
esk
为:
[0176][0177]
其中,esk(uk)是寻优空间内进行寻优所得的分解模态uk对应的包络谱峭度;uk是
在细化后的寻优空间内进行寻优所得的一个分解模态;
[0178]
kse(uk)是寻优空间内进行寻优所得的分解模态uk对应的峭度与包络熵的比值。
[0179]
因为选择最大esku′
作为寻优的适应度函数。
[0180]
s7:在细化后的平衡参数α的寻优区间内采用麻雀搜索优化算法-(ssa)来选择目标模态的最优平衡参数α
最优
;
[0181]
s71:随机初始化麻雀种群并定义相关参数,定义最大迭代次数;
[0182][0183]
其中,d表示优化问题变量的维数,n是麻雀的数量;x代表麻雀种群的位置;
[0184]
s72:计算初始种群的适应度并将其排序进而选择出当前最优值和最差值。
[0185]
其中,f由步骤s6中确定的适应度函数确定;
[0186]
s73:更新发现者的位置,公式如下:
[0187][0188]
其中,m表示第m个麻雀;
[0189]
t代表当前迭代数,n=1,2,3,
…
,d;iter
max
为设置的最大迭代次数;x
m,n
表示第m个麻雀在第n维中的位置信息;σ∈(0,1]是一个随机数;r2和st分别表示预警值和安全值,其中r2∈(0,1],st∈(0.5,1];q表示服从正态分布的随机数;l表示一个1
×
d的矩阵,其中该矩阵内每个元素全部为1;
[0190]
当r2《st时,表示此时觅食环境周围没有捕食者,发现者可以在更大的范围内进行搜索;
[0191]
当r2≥st,说明种群中部分麻雀发现了捕食者,并向种群中其它麻雀发出警报,此时所有麻雀都需要迅速飞到其它安全地方进行觅食;
[0192]
s74:更新加入者的位置,公式如下:
[0193][0194]
其中,x
p
是目前发现者所占据的最优位置,x
worst
表示当前全局最差的位置;a表示一个1
×
d的矩阵,其中每个元素随机赋值为1或-1,并且规定a
+
=a
t
(aa
t
)-1
;
[0195]
当m》n/2时,表明适应度值较低的第m个加入者需要及时飞往其它地方觅食,以获得更多的能量。
[0196]
s75:更新意识到危险的麻雀位置,公式如下:
[0197][0198]
其中,x
best
是当前的全局最优位置;β作为步长控制参数,为服从正态分布的0-1之间的随机数;q是-1到1的随机数,funm则是当前麻雀个体的适应度值,fung和funw分别是当前全局最佳和最差的适应度值;ε是最小的常数,以避免分母为零;
[0199]
当funi》fung,表示此时的麻雀正处于种群的边缘,极其容易受到捕食者的攻击;x
best
表示种群中最安全的位置;funi=fung时,这表明处于种群中间的麻雀意识到了危险,需要靠近其它的麻雀以此尽量减少它们被捕食的风险;q表示麻雀移动的方向同时也是步长控制参数;
[0200]
s76:获得当前最优值,如果当前最优值比上一次迭代的最优值好的话就进行更新操作,否则不进行更新操作,并继续进行迭代操作直到满足条件为止;最终得到全局最优值和最佳适应度值;
[0201]
在细化后的平衡参数α的寻优区间内采用优化程序来选择目标模态的最优平衡参数α
最优
;得到最优平衡参数α
最优
=4192。
[0202]
s8:利用步骤s7中寻找的最优平衡参数α
最优
=4192,以及设置分解模数k=1进行vmd操作,提取唯一的分解模态为ue′
;
[0203]
s9:残差信号去除步骤s8中提取的唯一的分解模态ue′
后形成新的残差信号;
[0204]
s10:利用步骤s8中提取的唯一的分解模态ue′
进行信号重构,信号重构函数f
′
为:
[0205][0206]
s11:基于重构信号和原始信号之间的功率谱相似性来判断是否继续进行下一次模态分解的迭代:
[0207]
设置原始信号的功率谱为psf,公式为:
[0208]
psf=|f|2;
[0209]
设置重构信号功率谱为psf′
,公式为:
[0210]
psf′
=|f
′
|2;
[0211]
其中,f是原始信号的时间序列;
[0212]
重构信号和原始信号之间的功率谱相似性系数为:
[0213][0214]
其中,是是原始信号功率谱的均值;
[0215]
如果大于阀值0.9,则迭代停止;
[0216]
如果小于阀值0.9,则迭代继续,返回步骤s1继续进行。通过计算小于阀值0.9,返回s1进行第二次迭代分解。
[0217]
第二次迭代分解最优平衡参数α
最优
=200;迭代分解后大于阀值0.9,迭代分解停止。
[0218]
实施例2
[0219]
在实施例1构造信号x1(t)+x2(t)+c1(t)+c2(t)基础上添加不同等级的高斯白噪声,如图6-12所示,构造含噪声的新信号,公式如下:
[0220][0221]
式中,n(t)代表添加的噪声信号,η代表高斯白噪声。
[0222]
对上述含噪声的新信号x(t)按照本发明提供的方法进行迭代分解。
[0223]
为了量化改进递归vmd方法、传统vmd方法、ceemd方法、以分解模态u
′
与输入模态最大相关系数为寻优的vmd方法以及sk方法五种方法在不同信噪比下的分解精度,应用原始信号和重构信号之间的相关系数来表征。如表1所示,总结了对比的结果。
[0224]
表1 本发明方法和传统方法的结果对比
[0225]
[0226][0227]
如图13-16所示,除了sk方法失败外,其他方法在无噪声条件下都非常接近1;随着信噪比的降低,所有方法在处理模拟信号时的分解能力都会变弱。改进递归vmd方法相较于传统vmd方法能得到最优的分解结果,且在很多案例中,改进递归vmd方法是应用vmd所能得到的最优结果。尽管在现实中,分解前不知道信号的子分解模态,因此无法通过找到分解后的子模态与原始信号的子信号之间的最大相关系数来确定最优的分解参数。而本发明所提出的改进递归vmd方法避免了这个问题并且可以智能地确定参数。显然,与传统的vmd、ceemd和sk方法相比,即使在嘈杂的环境中,改进递归vmd方法在处理具有不同分量的复合信号方面仍具有令人满意的适用性。综上所述,以上仿真充分突出了改进递归vmd方法的抗混叠特性和所提出方法在处理多分量非平稳信号中的噪声鲁棒性的优势。
[0228]
其中,u1为应用分解方法分解得到的第一个模态;
[0229]
u2为应用分解方法分解得到的第二个模态;
[0230]
x1、x2、c1、c2分别是谐波信号x1(t)、多分量调制信号x2(t)、随机脉冲c1(t)、周期性瞬态脉冲c2(t)的仿真的子信号。
[0231]
实施例3
[0232]
s1:采集泵空化信号,如图17-18所示;对上述振动信号按照本发明方法进行vmd分解;将信号设置为残差信号,对残差信号执行vmd操作;初始化平衡参数α
初
设置为2000,分解模数设置为1;
[0233]
s2:提取到的唯一模态作为参考模态,方便测试后续每个分解与其的相关性;同时,计算参考模态u
ref
的峭度
[0234]
s3:设置平衡参数α标定测试点,并按照其参数进行vmd操作。平衡参数α的取值在2000以内时,其对信号分解结果的影响更大;因此,在2000-20000区间内选取较大的平衡参数α间隔,具体为α=6000、α=10000、α=15000、α=20000。在2000以内,选择α=1000、α=600和α=200分别测试分解结果。成标定集合α
′
=[200,600,1000,2000,6000,10000,15000,20000]。每一次选取不同平衡参数α的值进行vmd分解时,分解模数k始终设置为1;分解模态记为u
′
;从靠近2000的标定测试点开始测试;每次分解后计算分解模态u
′
与参考模
态的相似性分解模态u
′
的峭度kuru′
、分解模态u
′
的包络谱峭度esku′
、分解模态u
′
的峭度与包络熵比值kseu′
四个参数。
[0235]
s4:缩小平衡参数α的标定测试点的数量,减少不必要的vmd操作。当对某个平衡参数α的标定测试点进行vmd操作后,发现如果相关系数大于0.95时,则保留该平衡参数α的标定测试点,否则,则认为分解的信号与参考标准下的分解信号拥有的中心频率完全不一样,该平衡参数α的标定测试点作为细化后平衡参数α的寻优区间的其中一个边界;后续将不再对跨越边界的其他标定测试点进行vmd操作;
[0236]
s5:根据分解信号的特征细化平衡参数α的寻优区间;
[0237]
如果则认为提取的分解模态具有明显地冲击特性,此时在边界内剩余几个α标定测试点所对应的kseu′
寻找其中的最大值;
[0238]
如果则在边界内剩余几个平衡参数α的标定测试点所对应的esku′
寻找其中的最大值。以最大值对应的平衡参数α的值为中心,在标定集合α
′
中各向左和右移动一位,对应的两个平衡参数α的值形成最终细化后的平衡参数α的寻优区间;
[0239]
s6:确定寻优的适应度函数;
[0240]
如果则认为提取的分解模态具有明显地冲击特性,此时选择最大kseu′
作为寻优的适应度函数。
[0241]
如果选择最大esku′
作为寻优的适应度函数。
[0242]
s7:利用s6中寻找的最优平衡参数α
最优的
值以及k=1进行vmd操作;提取唯一的分解模态,记为ui。
[0243]
s8:残差信号去除s7中提取的分解模态后形成新的残差信号;
[0244]
s9:利用s7中提取的分解模态进行信号重构,直到重构信号与原始信号的相关系数大于0.95。
[0245]
图26-32为应用传统vmd方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代分解后对应子模态的频域以及对应的包络谱。子模态包络谱的分析表明特征频率轴频bpf、叶频rf以及bpf-rf和bpf+rf被有效提取。
[0246]
图19-25为应用本发明所提方法对实施例3中泵空化工况下采集的振动信号进行vmd迭代分解后对应子模态的频域以及对应的包络谱。子模态包络谱的分析表明特征频率轴频bpf、叶频rf以及bpf-rf和bpf+rf被有效提取。通过对比图19-25和图26-32,在拥有相同频率的模态中,通过本发明所提方法分解的模态具有较高的峭度,这表明改进递归vmd方法能有效提取流体机械流致振动导致的明显轴频和叶频,证明了本发明所提方法的优越性。
[0247]
尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1