一种LADCP与组合惯性导航系统联合观测系统及方法与流程
文档序号:31652266发布日期:2022-09-27 21:38阅读:75来源:国知局
导航: X技术> 最新专利>测量装置的制造及其应用技术
一种ladcp与组合惯性导航系统联合观测系统及方法
技术领域
1.本发明属于海流观测领域,尤其涉及一种ladcp与组合惯性导航系统联合观测系统及方法。
背景技术:
2.ladcp(lowered acoustic doppler current profiler,下放式声学多普勒海流剖面仪)是20世纪90年代出现的一种海流剖面测量方法,能够快速获得大范围、全水深的海流剖面数据,在国内外的调查中已有了较广泛的应用。ladcp通常与ctd(conductivity-temperature-depth profiler,温盐深仪)捆绑在一起,并与ctd水下单元一起升降,以一定的速度从海表下放到海底,再从海底提升到海面,从而获得一系列的单个流速小剖面。这些流速小剖面需要经过后期资料处理,重叠计算以获得整个测量深度上的流速剖面。
3.ladcp 直接测得的流速流向是海流相对于ladcp 的相对速度和方向,这个流速流向只有在ladcp 静止的情况下才是海流的真实速度。由于ladcp 采用投放式测量,钢缆又有一定的倾角且测量船不能保证绝对零速度,所以ladcp垂直速度和水平速度的量值很大且无规律,所以,如何从ladcp 的测量速度中提取出海流的真实速度一直是ladcp 测量技术中的难点问题。目前,ladcp 测量过程中通过底跟踪技术求出ladcp 仪器本身相对于海底的速度,再求出海流的速度。但底跟踪技术只有在近底层附近才有意义,而且通过底跟踪并不能准确的计算ladcp整个下放过程中的每个时刻的三维运动速度。在海洋走航观测工作中有时因为工作时间限制ladcp 并不能每次都能够下放到海底测到底跟踪数据,导致ladcp的测量误差的测量较大甚至失效。 ladcp测量流向使用的自身的磁罗盘,测量船作为一个巨大的铁磁物体在下放初期会对ladcp的流向测量产生较大的影响。
4.现有的ladcp海流观测方法中,缺乏实时高精度校正流速流向观测数据的装置及方法,导致海流速度和方向观测误差较大,并且每个观测过程必须观测到底跟踪数据,致使海洋海流剖面测量工作效率较低,增加了海洋工作成本。
技术实现要素:
5.为解决上述技术问题,本发明提出一种ladcp与组合惯性导航系统联合观测系统及方法的技术方案,以解决上述技术问题。
6.本发明第一方面,公开了一种ladcp与组合惯性导航系统联合观测系统,所述系统包括:ladcp、组合惯导系统主机、数据处理单元、无线传输模块、耐压无线天线、电池舱、第一gnss天线、第二gnss天线和仪器支架;所述ladcp,即下放式声学多普勒海流剖面仪,安装于所述仪器支架内部的下方,所述组合惯导系统主机、数据处理单元、无线传输模块和电池舱分别安装于所述仪器支架内部,且所述组合惯导系统主机、数据处理单元、无线传输模块和电池舱位于所述ladcp的上方,所述耐压无线天线安装于所述无线传输模块的上方,所述第一gnss天线和第二gnss天线安装于所述仪器支架的外部的上方;
所述电池舱为所述ladcp、组合惯导系统主机、数据处理单元、无线传输模块、第一gnss天线和第二gnss天线供电;所述第一gnss天线和第二gnss天线接收gnss卫星信号并通过同轴线缆传输至所述组合惯导系统主机;所述ladcp实时观测海流剖面测量数据;所述组合惯导系统主机观测gnss位置、gnss定向数据、三轴加速度数据、三轴陀螺仪角速度、横滚角、俯仰角和航向角速率;所述数据处理单元通过串口与无线传输模块连接,所述无线传输模块通过所述耐压无线天线与传输数据处理单元和母船甲板单元之间的通信数据;所述数据处理单元通过串口与所述ladcp和组合惯导系统主机连接,得到海流剖面测量数据、gnss位置、gnss定向数据、三轴加速度数据、三轴陀螺仪角速度、横滚角、俯仰角和航向角速率,并通过所述gnss定向数据、横滚角、俯仰角和航向角速率对所述ladcp观测的海流剖面的三维流速进行实时高精度校正。
7.根据第一方面所述的系统,所述联合观测系统还包括:第一耐压仓、第二耐压仓和第三耐压仓;所述第一耐压仓和第二耐压仓位于所述仪器支架的外部的上方;所述第一gnss天线安装于所述第一耐压仓内部;所述第二gnss天线安装于所述第二耐压仓内部;所述第三耐压仓位于所述仪器支架内部的所述ladcp的上方,所述组合惯导系统主机、数据处理单元、无线传输模块和电池舱分别安装于所述第三耐压仓内部,所述耐压无线天线安装于所述第三耐压仓上方;所述第一耐压仓和第二耐压仓分别通过同轴水密电缆和水密接插件与所述第三耐压仓连接,所述ladcp通过水密电缆与所述第三耐压仓连接。
8.根据第一方面所述的系统,所述ladcp的北方向与所述组合惯导系统主机的北方向对齐。
9.本发明第二方面,公开了一种ladcp与组合惯性导航系统联合观测方法,采用第一方面任一项所述的一种ladcp与组合惯性导航系统联合观测系统,ladcp实时观测海流剖面的测量数据和所述组合惯导系统主机观测gnss位置、gnss定向数据、三轴加速度数据、三轴陀螺仪角速度、横滚角、俯仰角和航向角速率的操作方法包括:观测船到达观测点位后,将所述ladcp的坐标系与所述组合惯导系统主机的坐标系对齐,即ladcp的北方向与所述组合惯导系统主机的北方向对齐;将所述联合观测系统吊至海面,通过母船甲板单元接收所述数据处理单元的回传数据;将所述联合观测系统下放至海下预设深度,观测海流剖面测量数据;观测海流剖面测量数据完成后,将所述联合观测系统收回。
10.根据第二方面所述的方法,所述操作方法还包括:判断所述组合惯导系统主机的gnss位置和gnss定向数据确定后,将所述联合观测系统下放至海下预设深度。
11.根据第二方面所述的方法,所述通过所述gnss定向数据、横滚角、俯仰角和航向角
速率对于ladcp观测的海流剖面的三维流速进行实时高精度校正的方法包括:以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率进行离散积分,得到航向角;应用所述横滚角、俯仰角和航向角对海流剖面的三维流速、三维线速度和三维角速度进行第一次校正,即姿态校正,得到第一校正三维流速、第一校正三维线速度和第一校正三维角速度;应用所述第一校正三维线速度对所述第一校正三维流速进行第二次校正,即线速度校正,得到第二校正三维流速;应用所述第一校正三维角速度对所述第二校正三维流速进行第三次校正,即角速度校正,得到第三校正三维流速,即海流剖面的三维流速校正的最终结果。
12.根据第二方面所述的方法,所述以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率离散积分的方法,得到航向角之前,所述方法还包括:消除ladcp的噪声和外界环境引起的ladcp的航向角速率离散采样值的瞬时粗大误差,具体方法包括:计算航向角速率离散采样值序列的算数平均值;计算航向角速率离散采样值序列的标准差;应用所述算数平均值和标准差,计算航向角速率离散采样值序列的标志值,具体公式为:其中,表示航向角速率离散采样值序列中采样值t的标志值,s表示标准差,表示序列中第t个航向角速率离散采样值,表示算数平均值;应用序列中航向角速率离散采样值对应的标志值与预设的临界值比较,如果小于所述临界值,保留所述航向角速率离散采样值,否则剔除所述航向角速率离散采样值;滤除航向角速率离散采样值的直流分量,具体方法包括:对消除了瞬时粗大误差的航向角速率离散采样值进行离散傅里叶变换;将频谱图中频率为0的频谱分量置0后进行离散傅里叶逆变换,得到滤除直流分量的航向角速率离散采样值。
13.根据第二方面所述的方法,所述以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率离散积分的方法,得到航向角的方法包括:所述以入水前最后一组没有失效的gnss定向数据作为初值,以最后一组没有失效的gnss定向数据的采样时刻作为时间零点,通过对所述航向角速率离散积分的方法,求出预设时刻为止ladcp旋转的角度,对所述ladcp旋转的角度360取余,得到所述航向角。
14.根据第二方面所述的方法,所述应用所述横滚角、俯仰角和航向角对海流剖面的三维流速、三维线速度和三维角速度进行第一次校正,得到第一校正三维流速、第一校正三
维线速度和第一校正三维角速度的方法包括:维线速度和第一校正三维角速度的方法包括:维线速度和第一校正三维角速度的方法包括:维线速度和第一校正三维角速度的方法包括:维线速度和第一校正三维角速度的方法包括:其中,代表未校正的矢量测量结果,,,,表示三维流速,表示三维线速度,表示三维角速度;代表横滚角,代表俯仰角,代表航向角;代表第一次校正后的矢量校正结果,,,,表示第一校正三维流速,表示第一校正三维线速度,表示第一校正三维角速度。
15.根据第二方面所述的方法,所述应用所述第一校正三维线速度对所述第一校正三维流速进行第二次校正,得到第二校正三维流速的方法包括:应用所述第一校正三维线速度与所述第一校正三维流速进行矢量相加,得到第二校正三维流速,具体公式为:其中,表示第二校正三维流速;应用所述第一校正三维角速度对所述第二校正三维流速进行第三次校正,即角速度校正,得到第三校正三维流速的方法包括:应用ladcp的波束出口至仪器支架的吊点的距离r与所述第一校正三维角速度相乘,得到三维旋转线速度,再应用所述三维旋转线速度与所述第二校正三维流速进行矢量相加,得到第三校正三维流速,具体公式为:其中,表示第三校正三维流速,即海流剖面的三维流速校正的最终结果。
16.本发明提出的方案,提高ladcp流速和流向的测量精度,降低了使用ladcp进行剖面流观测的工作成本。
附图说明
17.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的
附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
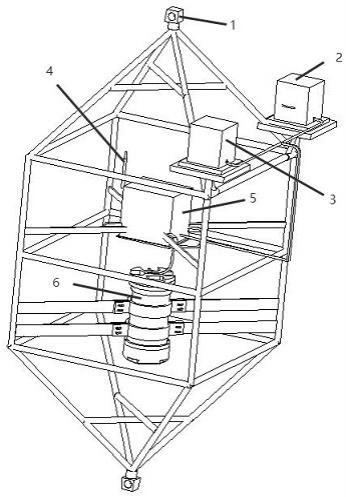
18.图1为根据本发明实施例的一种ladcp与组合惯性导航系统联合观测系统的结构图;图2为根据本发明实施例的ladcp与组合惯性导航系统联合观测方法流程图;图3为根据本发明实施例的所述通过所述gnss定向数据、横滚角、俯仰角和航向角速率对于ladcp观测的海流剖面的三维流速进行实时高精度校正的方法流程图;图4为根据本发明实施例的消除ladcp的噪声和外界环境引起的ladcp的航向角速率离散采样值的瞬时粗大误差方法流程图。
19.图中,1-仪器支架,2-第一耐压仓,3-第二耐压仓,4-耐压无线天线,5-第三耐压仓,6
‑ꢀ
ladcp。
具体实施方式
20.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例只是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.实施例1:本发明第一方面公开了一种ladcp与组合惯性导航系统联合观测系统,图1为根据本发明实施例的一种ladcp与组合惯性导航系统联合观测系统的结构图,具体如图1所示,所述系统包括:所述系统包括:ladcp6、组合惯导系统主机、数据处理单元、无线传输模块、耐压无线天线4、电池舱、第一gnss天线、第二gnss天线和仪器支架1;所述ladcp6,即下放式声学多普勒海流剖面仪,安装于所述仪器支架1内部的下方,所述组合惯导系统主机、数据处理单元、无线传输模块和电池舱安装于所述仪器支架1内部的所述ladcp6的上方,所述耐压无线天线4安装于所述无线传输模块的上方,所述第一gnss天线和第二gnss天线安装于所述仪器支架1的外部的上方;所述电池舱与所述ladcp6、组合惯导系统主机、数据处理单元、无线传输模块、第一gnss天线和第二gnss天线连接,进行供电,保证剖面流测量过程的各模块正常工作;所述第一gnss天线和第二gnss天线接收gnss卫星信号并通过同轴线缆传输至所述组合惯导系统主机;所述ladcp实时观测海流剖面测量数据;所述组合惯导系统主机观测gnss位置、gnss定向数据、三轴加速度数据、三轴陀螺仪角速度、横滚角、俯仰角和航向角速率;所述数据处理单元通过串口与无线传输模块连接,所述无线传输模块通过所述耐压无线天线与传输数据处理单元与母船甲板单元之间的通信数据;所述数据处理单元通过串口与所述ladcp和组合惯导系统主机连接,得到海流剖面测量数据、gnss位置、gnss定向数据、三轴加速度数据、三轴陀螺仪角速度、横滚角、俯仰角和航向角速率,并通过所述gnss定向数据、横滚角、俯仰角和航向角速率对于ladcp观测的海流剖面的三维流速进行实时高精度校正。
22.在一些实施例中,所述联合观测系统还包括:第一耐压仓2、第二耐压仓3和第三耐压仓5;所述第一耐压仓2和第二耐压仓3位于所述仪器支架1的外部的上方;所述第一gnss天线安装于所述第一耐压仓2内部;所述第二gnss天线安装于所述第二耐压仓3内部;所述第三耐压仓5位于所述仪器支架1内部的所述ladcp的上方,所述组合惯导系统主机、数据处理单元、无线传输模块和电池舱安装于所述第三耐压仓5内部,所述耐压无线天线4安装于所述第三耐压仓5上方;所述第一耐压仓2和第二耐压仓3分别通过同轴水密电缆和水密接插件与所述第三耐压仓5连接,所述ladcp6通过水密电缆与所述第三耐压仓5连接。
23.在一些实施例中,数据处理单元拟采用pc104架构的嵌入式采集器为核心,通过第一串口读取ladcp海流数据,通过第二串口读取组合惯导系统的gnss位置及定向数据,通过第三串口读取组合惯导系统的三轴加速度数据,通过第四串口读取组合惯导系统的三轴角速度、横滚角、俯仰角和航向角速率,通过第五串口与无线传输模块进行数据通信,数据处理模块同步采集流速、流向、gnss位置、gnss方向、横滚角、俯仰角、三轴加速度、三轴角速度和对地速度等数据;仪器支架1采用无磁材料制作,多为铝或者316l不锈钢。所述ladcp的北方向与所述组合惯导系统主机的北方向对齐。
24.上述系统的具体工作原理和操作方法如下:所述ladcp实时观测海流剖面的测量数据和所述组合惯导系统主机观测gnss位置、gnss定向数据、三轴加速度数据、三轴陀螺仪角速度、横滚角、俯仰角和航向角速率的操作方法包括,s11:观测船到达观测点位后,将所述ladcp的坐标系与所述组合惯导系统主机的坐标系对齐;s12:将所述联合观测系统吊至海面,通过母船甲板单元接收所述数据处理单元的回传数据;s13:判断所述组合惯导系统主机的gnss位置和gnss定向数据确定;s14:将所述联合观测系统下放至海下预设深度,观测海流剖面测量数据;s15:观测海流剖面测量数据完成后,将所述联合观测系统收回。
25.如图3所示:在一些实施例中,所述通过所述gnss定向数据、横滚角、俯仰角和航向角速率对于ladcp观测的海流剖面的三维流速进行实时高精度校正的方法包括,由于设备进入水中后,gnss位置和方向数据将失效,船体是一个巨大的铁磁性物体,会对ladcp的自带的磁罗经测得方向产生很大的影响,甚至会出现错误的方向数据;s21:以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率进行离散积分,得到航向角;s22:应用所述横滚角、俯仰角和航向角对海流剖面的三维流速、三维线速度和三维角速度进行第一次校正,即姿态校正,得到第一校正三维流速、第一校正三维线速度和第一校正三维角速度;s23:应用所述第一校正三维线速度对所述第一校正三维流速进行第二次校正,即线速度校正,得到第二校正三维流速;
s24:应用所述第一校正三维角速度对所述第二校正三维流速进行第三次校正,即角速度校正,得到第三校正三维流速,即海流剖面的三维流速校正的最终结果。
26.在一些实施例中,所述以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率离散积分的方法,得到航向角之前,所述方法还包括:消除ladcp的噪声和外界环境引起的ladcp的航向角速率离散采样值的瞬时粗大误差,具体方法包括,如图4所示:s31:计算航向角速率离散采样值序列的算数平均值;s32:计算航向角速率离散采样值序列的标准差;s33:应用所述算数平均值和标准差,计算航向角速率离散采样值序列的标志值,具体公式为:其中,表示航向角速率离散采样值序列中采样值t的标志值,s表示标准差,表示序列中第t个航向角速率离散采样值,表示算数平均值;计算航向角速率离散采样值序列的算数平均值:其中,n表示航向角速率离散采样值序列中采样值的数量;计算航向角速率离散采样值序列的标准差:s34:应用序列中航向角速率离散采样值对应的标志值与预设的临界值比较,如果小于所述临界值,保留所述航向角速率离散采样值,否则剔除所述航向角速率离散采样值;在本实施例中,预设的临界值为3.28;滤除航向角速率离散采样值的直流分量,具体方法包括:对消除了瞬时粗大误差的航向角速率离散采样值进行离散傅里叶变换;将频谱图中频率为0的频谱分量置0后进行离散傅里叶逆变换,得到滤除直流分量的航向角速率离散采样值。
27.在一些实施例中,所述以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率离散积分的方法,得到航向角的方法包括:所述以入水前最后一组没有失效的gnss定向数据作为初值,以最后一组没有失效的gnss定向数据的采样时刻作为时间零点,通过对所述航向角速率离散积分的方法,求出预设时刻为止ladcp旋转的角度,对所述ladcp旋转的角度360取余,得到所述航向角,具体公式为:
。
28.在一些实施例中,所述应用所述横滚角、俯仰角和航向角对海流剖面的三维流速、三维线速度和三维角速度进行第一次校正,即姿态校正,得到第一校正三维流速、第一校正三维线速度和第一校正三维角速度的方法包括:三维线速度和第一校正三维角速度的方法包括:三维线速度和第一校正三维角速度的方法包括:三维线速度和第一校正三维角速度的方法包括:三维线速度和第一校正三维角速度的方法包括:其中,代表未校正的矢量测量结果,,,,表示三维流速,表示三维线速度,表示三维角速度;代表横滚角,代表俯仰角,代表航向角;代表第一次校正后的矢量校正结果,,,,表示第一校正三维流速,表示第一校正三维线速度,表示第一校正三维角速度。
29.在一些实施例中,所述应用所述第一校正三维线速度对所述第一校正三维流速进行第二次校正,即线速度校正,得到第二校正三维流速的方法包括:应用所述第一校正三维线速度与所述第一校正三维流速进行矢量相加,得到第二校正三维流速,具体公式为:其中,表示第二校正三维流速;应用所述第一校正三维角速度对所述第二校正三维流速进行第三次校正,即角速度校正,得到第三校正三维流速的方法包括:应用ladcp的波束出口至仪器支架的吊点的距离r与所述第一校正三维角速度相乘,得到三维旋转线速度,再应用所述三维旋转线速度与所述第二校正三维流速进行矢量相加,得到第三校正三维流速,具体公式为:其中,表示第三校正三维流速,即海流剖面的三维流速校正的最终结果。
30.实施例2:本发明第二方面公开了一种ladcp与组合惯性导航系统联合观测方法,采用第一
方面所公开的一种ladcp与组合惯性导航系统联合观测方系统,如图2所示:所述ladcp实时观测海流剖面的测量数据和所述组合惯导系统主机观测gnss位置、gnss定向数据、三轴加速度数据、三轴陀螺仪角速度、横滚角、俯仰角和航向角速率的操作方法包括,观测船到达观测点位后,将所述ladcp的坐标系与所述组合惯导系统主机的坐标系对齐;将所述联合观测系统吊至海面,通过母船甲板单元接收所述数据处理单元的回传数据;判断所述组合惯导系统主机的gnss位置和gnss定向数据确定;将所述联合观测系统下放至海下预设深度,观测海流剖面测量数据;观测海流剖面测量数据完成后,将所述联合观测系统收回。
31.如图3所示:在一些实施例中,所述通过所述gnss定向数据、横滚角、俯仰角和航向角速率对于ladcp观测的海流剖面的三维流速进行实时高精度校正的方法包括,由于设备进入水中后,gnss位置和方向数据将失效,船体是一个巨大的铁磁性物体,会对ladcp的自带的磁罗经测得方向产生很大的影响,甚至会出现错误的方向数据;以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率进行离散积分,得到航向角;应用所述横滚角、俯仰角和航向角对海流剖面的三维流速、三维线速度和三维角速度进行第一次校正,即姿态校正,得到第一校正三维流速、第一校正三维线速度和第一校正三维角速度;应用所述第一校正三维线速度对所述第一校正三维流速进行第二次校正,即线速度校正,得到第二校正三维流速;应用所述第一校正三维角速度对所述第二校正三维流速进行第三次校正,即角速度校正,得到第三校正三维流速,即海流剖面的三维流速校正的最终结果。
32.在一些实施例中,所述以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率离散积分的方法,得到航向角之前,所述方法还包括:消除ladcp的噪声和外界环境引起的ladcp的航向角速率离散采样值的瞬时粗大误差,具体方法包括,如图4所示:计算航向角速率离散采样值序列的算数平均值;计算航向角速率离散采样值序列的标准差;应用所述算数平均值和标准差,计算航向角速率离散采样值序列的标志值,具体公式为:其中,表示航向角速率离散采样值序列中采样值t的标志值,s表示标准差,表示序列中第t个航向角速率离散采样值,表示算数平均值;计算航向角速率离散采样值序列的算数平均值:
其中,n表示航向角速率离散采样值序列中采样值的数量;计算航向角速率离散采样值序列的标准差:应用序列中航向角速率离散采样值对应的标志值与预设的临界值比较,如果小于所述临界值,保留所述航向角速率离散采样值,否则剔除所述航向角速率离散采样值;在本实施例中,预设的临界值为3.28;滤除航向角速率离散采样值的直流分量,具体方法包括:对消除了瞬时粗大误差的航向角速率离散采样值进行离散傅里叶变换;将频谱图中频率为0的频谱分量置0后进行离散傅里叶逆变换,得到滤除直流分量的航向角速率离散采样值。
33.在一些实施例中,所述以入水前最后一组没有失效的gnss定向数据作为初值,通过对所述航向角速率离散积分的方法,得到航向角的方法包括:所述以入水前最后一组没有失效的gnss定向数据作为初值,以最后一组没有失效的gnss定向数据的采样时刻作为时间零点,通过对所述航向角速率离散积分的方法,求出预设时刻为止ladcp旋转的角度,对所述ladcp旋转的角度360取余,得到所述航向角,具体公式为:。
34.在一些实施例中,所述应用所述横滚角、俯仰角和航向角对海流剖面的三维流速、三维线速度和三维角速度进行第一次校正,即姿态校正,得到第一校正三维流速、第一校正三维线速度和第一校正三维角速度的方法包括:三维线速度和第一校正三维角速度的方法包括:三维线速度和第一校正三维角速度的方法包括:三维线速度和第一校正三维角速度的方法包括:三维线速度和第一校正三维角速度的方法包括:其中,代表未校正的矢量测量结果,,,,表示三维流速,表示三维线速度,表示三维角速度;代表横滚角,代表俯仰角,代表航向角;代表第一次校正后的矢量校正结果,,,,表示第一校正三维
流速,表示第一校正三维线速度,表示第一校正三维角速度。
35.在一些实施例中,所述应用所述第一校正三维线速度对所述第一校正三维流速进行第二次校正,即线速度校正,得到第二校正三维流速的方法包括:应用所述第一校正三维线速度与所述第一校正三维流速进行矢量相加,得到第二校正三维流速,具体公式为:其中,表示第二校正三维流速;应用所述第一校正三维角速度对所述第二校正三维流速进行第三次校正,即角速度校正,得到第三校正三维流速的方法包括:应用ladcp的波束出口至仪器支架的吊点的距离r与所述第一校正三维角速度相乘,得到三维旋转线速度,再应用所述三维旋转线速度与所述第二校正三维流速进行矢量相加,得到第三校正三维流速,具体公式为:其中,表示第三校正三维流速,即海流剖面的三维流速校正的最终结果。
36.综上,本发明各个方面的技术方案与现有技术相比具有如下优点:提高ladcp流速和流向的测量精度,降低了使用ladcp进行剖面流观测的工作成本。
37.请注意,以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。以上实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
- 该技术已申请专利。仅供学习研究,如用于商业用途,请联系技术所有人。
- 技术研发人员:李淑江 梁冠辉 王冠琳 滕飞 徐腾飞 王永刚 魏泽勋
- 技术所有人:自然资源部第一海洋研究所
- 我是此专利的发明人
- 该领域下的技术专家
- 如您需求助技术专家,请点此查看客服电话进行咨询。
- 1、邢老师:1.机械设计及理论 2.生物医学材料及器械 3.声发射检测技术。
- 2、王老师:1.数字信号处理 2.传感器技术及应用 3.机电一体化产品开发 4.机械工程测试技术 5.逆向工程技术研究
- 3、王老师:1.机器人 2.嵌入式控制系统开发
- 4、张老师:1.机械设计的应力分析、强度校核的计算机仿真 2.生物反应器研制 3.生物力学
- 5、赵老师:检测与控制技术、机器人技术、机电一体化技术
- 如您是高校老师,可以点此联系我们加入专家库。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
精彩留言,会给你点赞!
专利分类正在加载中....