三坐标测量装置、系统和方法以及标定装置和方法与流程
本技术涉及坐标测量的,特别是一种三坐标测量装置、系统和方法以及标定装置和方法。
背景技术:
1、三坐标测量系统常用于测量航天、航空、武器装备等大尺寸、重载等军用装备,可以满足大范围、高精度、灵活性的测量需求。通过例如激光跟踪仪、igps及三坐标测量等方式,可以获得相对高精度的三坐标测量结果。
2、受限于现有的测量手段和测试方法,在某些场景下,难以利用三坐标测量系统对特定点位的三坐标进行定点测量。例如,在实际测试过程中,待检测物体在异形结构位置处的测量难度通常较大;又如,可测试空间较小可能导致传统测量设备无法到达。随着高端装备产品的复杂程度越来越高、任务量急剧增加,对装备点位进行高效率、柔性化的自动检测提出了迫切要求。
技术实现思路
1、本技术提供一种三坐标测量装置、三坐标测量系统、三坐标测量方法、三坐标测量装置的标定装置和标定方法,目的是高效率、柔性化地在三坐标测量系统中对特定点位进行自动检测。
2、第一方面,提供了一种三坐标测量装置,应用于三坐标测量系统,所述三坐标测量系统包括信号发射器,所述三坐标测量装置包括:
3、主体部;
4、测头,所述测头设置于所述主体部,所述测头用于设置在待测位置;
5、n个传感器,所述传感器用于检测来自所述信号发射器的信号,以输出与所述传感器在所述三坐标测量系统中的坐标对应的信息,所述n个传感器设置于所述主体部,所述n个传感器包括不共线设置的三个传感器,所述n个传感器分别到所述测头的距离,以及所述n个传感器在所述三坐标测量系统中的坐标,用于测量所述待测位置的坐标,n≥3。
6、与现有技术相比,本技术提供的方案至少包括以下有益技术效果:利用非共线设置的多个传感器的相互约束关系进行组合测量,可得到测头在三坐标测量场下的实时三坐标,具有较高的测量精度以及便携性。由于测头尺寸小,可解决杂零件表面、隐蔽点等传感器无法到达的情况,同时具有大范围测量优势,因此有利于实现高效率、柔性化地在三坐标测量系统中对特定点位进行自动检测。本发明采用基于旋转激光自动经纬仪多光电接收器集成大范围手持式三维坐标测量方法,利用多个传感器的相互约束关系进行组合测量,具有较高的测量精度以及便携性,避免原测量手段光电接收器需贴于被测物体表面,导致无法进行复杂零件表面以及隐蔽点的坐标测量的问题。采用该发明方法,解决了大型装备复杂零件表面以及隐蔽点实时三维坐标测量。
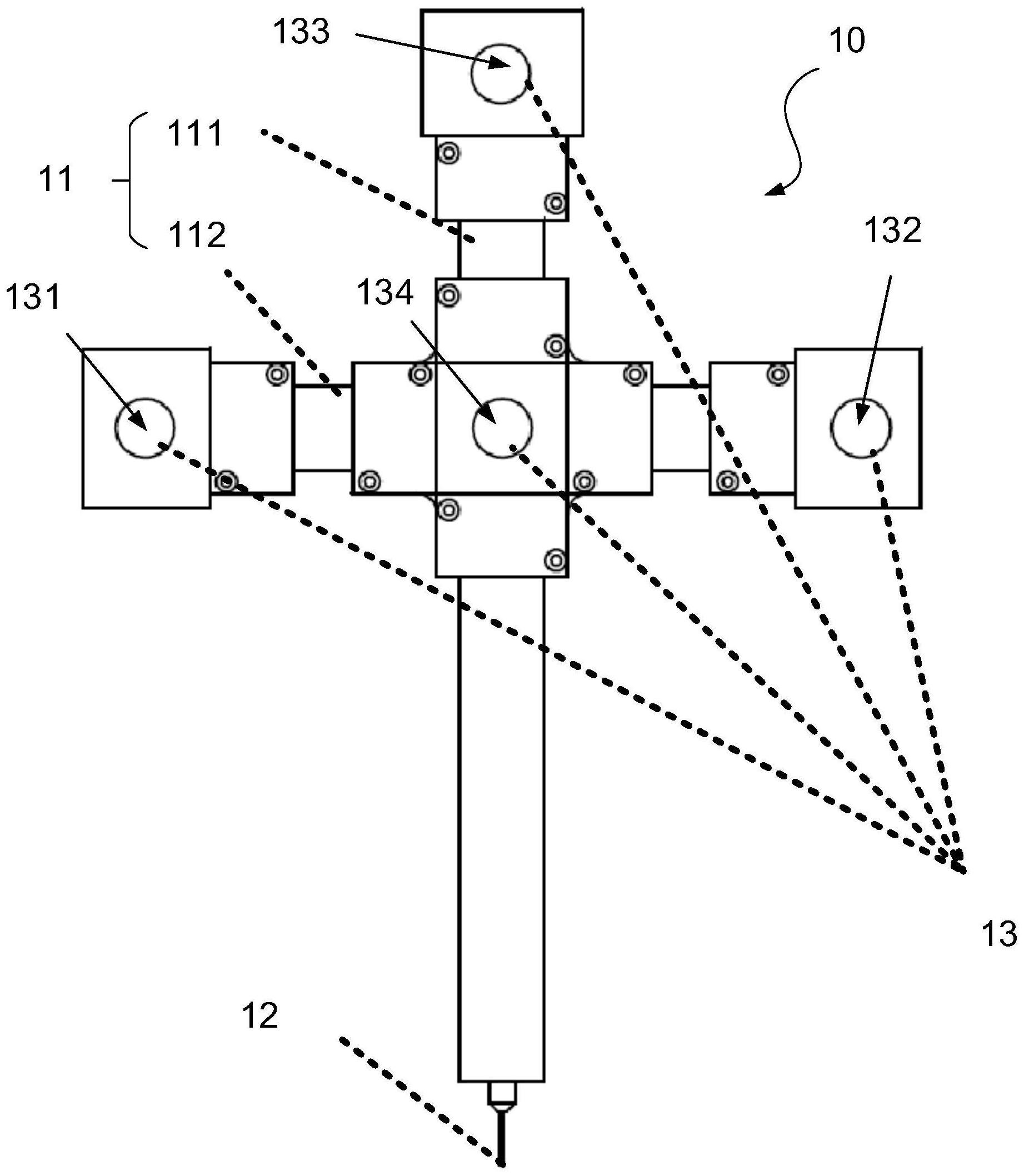
7、结合第一方面,在第一方面的某些实现方式中,所述n个传感器包括第一传感器、第二传感器、第三传感器,所述主体部包括交叉设置的第一支撑杆和第二支撑杆,所述第一支撑杆上设置有所述测头,所述第二支撑杆的两端分别设置有所述第一传感器和所述第二传感器,所述第三传感器设置于所述第一支撑杆且位于所述第二支撑杆以外。
8、由于支撑杆的形状相对容易持握或夹持,便于测量人员、测量机械手或测量夹具操作本技术提供的三坐标测量装置。
9、结合第一方面,在第一方面的某些实现方式中,所述第一支撑杆和所述第二支撑杆垂直设置。
10、由于第一支撑杆和第二支撑杆垂直设置,使得第一传感器、第二传感器、第三传感器和待测位置的坐标满足特定条件:第一传感器的坐标和第二传感器的坐标的连线,垂直于第三传感器的坐标和待测位置的坐标的连线。因此,有利于快速输出待测位置的准确坐标。
11、结合第一方面,在第一方面的某些实现方式中,n=4。
12、当三坐标测量装置具有4个传感器时,求解待测位置坐标的方程式数量相对合适,有利于降低数据求解的难度,数据求解过程不会过度冗余,还有利于使数据求解结果更加准确。
13、结合第一方面,在第一方面的某些实现方式中,所述n个传感器的信号接收方向相同。
14、也就是说,每个传感器接收扇面位置的朝向可以一致。由此有利于提升信号接收性能。
15、结合第一方面,在第一方面的某些实现方式中,所述传感器可绕所述主体部旋转。
16、通过传感器绕主体部旋转,可以调整传感器的信号接收方向,进而便于调整三坐标测量装置的整体信号接收性能。
17、第二方面,提供了一种三坐标测量系统,包括:
18、信号发射器;
19、如上述第一方面中的任意一种实现方式中所述的三坐标测量装置。
20、第三方面,提供了一种三坐标测量方法,所述方法应用于如上述第二方面中的任意一种实现方式中所述的三坐标测量系统,所述方法包括:
21、将所述测头设置于待测位置;
22、控制所述信号发射器发射信号,并获取所述n个传感器分别输出的n个信号;
23、根据所述n个信号,确定所述n个传感器分别对应的n个坐标;
24、根据所述n个坐标以及所述n个传感器分别到所述测头的距离,确定所述待测位置的坐标。
25、结合第三方面,在第三方面的某些实现方式中,所述n个坐标、所述n个传感器分别到所述测头的距离和所述待测位置的坐标满足:
26、
27、其中,x、y、z为所述待测位置的坐标,xi、yi、zi为所述n个传感器中第i传感器的坐标,di为所述第i传感器到所述测头的距离,1≤i≤n。
28、上述公式直接利用坐标进行转换,有利于减少计算过程的复杂度。
29、结合第三方面,在第三方面的某些实现方式中,所述根据所述n个坐标以及所述n个传感器分别到所述测头的距离,确定所述待测位置的坐标,包括:
30、根据以下公式确定所述待测位置的坐标:
31、
32、其中,x、y、z为所述待测位置的坐标,xi、yi、zi为所述n个传感器中第i传感器的坐标,di为所述第i传感器到所述测头的距离,j为最小值或j小于预设阈值,1≤i≤n。
33、通过判定j是否为最小值或小于预设阈值(预设阈值例如可以为0.01~0.1),可以加快计算收敛速度,快速输出精度相对较高的待测位置的坐标,从而有利于提高点位检测的效率。
34、第四方面,提供了一种三坐标测量装置的标定装置,所述标定装置应用于如上述第一方面中的任意一种实现方式中所述的三坐标测量装置,所述标定装置包括:
35、标定基座,所述标定基座包括凹槽,所述凹槽用于与所述测头配合。
36、与现有技术相比,本技术提供的方案至少包括以下有益技术效果:在标定时,测头可以嵌于凹槽内,因此有利于避免在标定过程中测头偏离标定位置,增大标定精确度。
37、结合第四方面,在第四方面的某些实现方式中,所述测头的形状为球形。
38、当测头的形状为球形时,测头在凹槽内的旋转姿态可以相对任意,有利于提高标定的便捷度。
39、第五方面,提供了一种三坐标测量装置的标定方法,所述标定方法应用于如上述第一方面中的任意一种实现方式中所述的三坐标测量装置,所述标定方法包括:
40、将所述测头设置于标定位置;
41、在所述主体部为第一姿态的情况下,获取所述n个传感器分别对应的n个第一坐标;
42、在所述主体部为第二姿态的情况下,获取所述n个传感器分别对应的n个第二坐标;
43、根据所述n个第一坐标、所述n个第二坐标,确定所述n个传感器分别到所述测头的距离。
44、与现有技术相比,本技术提供的方案至少包括以下有益技术效果:标定方法可以应用于任意标定位置,使标定过程不受限于具体位置。
45、在一些实施例中,根据所述n个第一坐标、所述n个第二坐标,除了可以实现对三坐标测量装置的标定,还可以输出标定位置的坐标。因此,标定过程和位置检测可以同时进行,有利于使位置检测结果更加准确。
46、结合第五方面,在第五方面的某些实现方式中,所述n个第一坐标、所述n个第二坐标和所述n个传感器分别到所述测头的距离满足:
47、
48、其中,x、y、z为所述标定位置的坐标,xij、yij、zij为所述n个传感器中第i传感器的第j坐标,di为所述第i传感器到所述测头的距离,1≤i≤n,j≥1。
49、上述公式直接利用坐标进行转换,有利于减少计算过程的复杂度。
50、结合第五方面,在第五方面的某些实现方式中,所述根据所述n个第一坐标、所述n个第二坐标,确定所述n个传感器分别到所述测头的距离,包括:
51、根据以下公式确定所述n个传感器分别到所述测头的距离:
52、
53、其中,x、y、z为所述标定位置的坐标,xij、yij、zij为所述n个传感器中第i传感器的与第j姿态对应的坐标,di为所述第i传感器到所述测头的距离,k为最小值或k小于预设阈值,1≤i≤n,1≤j≤m。
54、通过判定k是否为最小值或小于预设阈值(预设阈值例如可以为0.01~0.1),可以加快计算收敛速度,快速输出精度相对较高的标定位置的坐标,从而有利于提高点位检测的效率。
- 还没有人留言评论。精彩留言会获得点赞!