用于双极化相控阵气象雷达的标校方法和系统
1.本技术涉及雷达测量技术领域,特别是涉及一种用于双极化相控阵气象雷达的标校方法和系统。
背景技术:
2.气象雷达利用无线电波对天气目标进行探测和精确反演,不仅用于军事领域探测,也日益广泛地应用于国民经济建设和各门科学研究之中。随着雷达技术的发展,对双极化相控阵气象雷达的要求不仅是传统的测得到,还需要测得准,测得清。精密极化测量日益成为双极化相控阵气象雷达应用的前提和标准。方位维机扫、俯仰维电扫是一种常见的双极化相控阵气象雷达扫描体制,在天气雷达中应用尤为广泛,目前一般是在方位维使用窄波束、俯仰向使用多波束。根据降水估计的精度要求,天气雷达回波强度的测量误差需要控制在1dbz之内,差分反射率误差控制在1.2db以内。雷达回波强度的测量误差主要来自于雷达系统。双极化相控阵气象雷达标校是通过比较标校器的测量反射回波与理论反射回波的大小,定量衡量雷达系统误差,是实现雷达精密测量的重要手段。
3.雷达标校系统由标校平台和标校器组成。根据不同的标校平台可以分为固定高塔平台、空飘气球平台和无人机平台等。其中空飘气球平台难以控制位置和速度,而固定高塔平台成本高、灵活性低;无人机平台具有较强的可控性的同时具有很大的灵活性和低成本等优点。根据标校器是否有源,可分成有源标校器和无源标校器。无源的标校器具有低成本、小型化、轻巧便携和应用范围广等优点。典型的无源标校器包括金属球、角反射器和龙伯透镜等。其中金属球具有低成本、姿态不敏感和易求雷达散射截面积理论解等优点。
4.在现有技术中,提出有利用单无人机携带金属球的方案,设计双gps球定位金属球用于气象雷达的校准。但是在实际中,该方案为保证金属球和无人机的回波不混叠,通过50m的长线连接无人机和金属球,造成金属球在空中摆动幅度较大,并且雷达需要工作在高距离分辨率模式以将无人机和金属球在距离维度上分开,故而该方法不适用于有风和低分辨率雷达的标定场景,使用的场景有限。
技术实现要素:
5.基于此,有必要针对上述技术问题,提供一种能够进行精密校准的用于双极化相控阵气象雷达的标校方法和系统。
6.一种用于双极化相控阵气象雷达的标校方法,所述方法实施于一标校系统,所述标校系统包括两架无人机,通过细绳固定在两架无人机之间的金属球,以及待标校的双极化相控阵气象雷达,各所述无人机以及金属球均设置有定位装置,所述标校方法包括:通过控制无人机使得无人机和金属球在空中呈现无人机-金属球-无人机的“v”字型;根据定位装置调整所述无人机和金属球的位置,使得两个无人机之间的连线与所述待标校的双极化相控阵气象雷达波束垂直,且两个无人机分别在主波束两侧的第一零陷
位置,所述金属球在所述主波束的中心线上;控制所述待标校的双极化相控阵气象雷达对所述金属球进行小范围水平扇扫,且每次扫描后,控制两架无人机同时上升预设距离直至扫描结束;获取所述待标校的双极化相控阵气象雷达的回波数据,根据所述回波数据计算得到的实测数据,根据所述实测数据与理论数据之间的差值对所述待标校的双极化相控阵气象雷达进行校准。
7.在其中一实施例中,各所述无人机与金属球之间的距离相等。
8.在其中一实施例中,所述根据定位装置调整所述无人机和金属球的位置包括:通过所述定位装置调整所述无人机与雷达之间水平距离,以及两无人机之间的连线距离分别到达预设值;其中,两架无人机之间的水平距离采用以下公式计算得到:在上式中,为无人机与雷达之间的水平距离,为双极化相控阵气象雷达在方位维的3db波束宽度,两个第一零陷位置之间的角度约为。
9.在其中一实施例中,固定在所述无人机与金属球之间的细绳长度为1.1 至1.4 。
10.在其中一实施例中,所述无人机上升预设距离通过下式计算得到:在上式中,为双极化相控阵气象雷达从低仰角到高仰角波束的俯仰维的3db波束宽度,为每个俯仰维波束被采样的次数。
11.在其中一实施例中,所述实测数据包括所述待标校的双极化相控阵气象雷达各个波束的双通道反射率因子、差分放射率以及校准差分相位。
12.一种用于双极化相控阵气象雷达的标校系统,所述标校系统包括两架无人机,通过细绳固定在两架无人机之间的金属球,以及待标校的双极化相控阵气象雷达,各所述无人机以及金属球均设置有定位装置,该标校系统通过实施上述用于双极化相控阵气象雷达的标校方法以实现双极化相控阵气象雷达的标校。
13.上述用于双极化相控阵气象雷达的标校方法及系统,通过利用两架无人机将金属球悬吊在空中,以解决金属球容易晃动的问题,并控制两架无人机分别处于雷达的主波束两侧的第一零陷位置以解决对雷达进行校准时容易受无人机平台杂波影响的问题,从而使得本方法具有成本低、适用范围广、灵活机动、标校体稳定和无人机体本身散射回波能量对标定结果影响小的优点。
附图说明
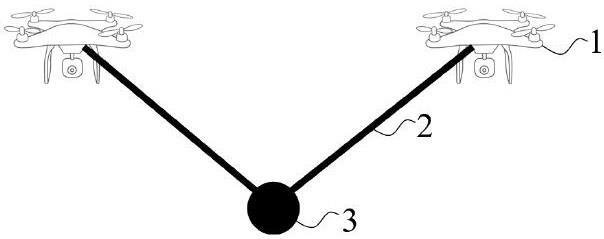
14.图1为一个实施例中用于双极化相控阵气象雷达的标校系统示意图;图2为一个实施例中用于双极化相控阵气象雷达的标校系统的工作正视图;图3为一个实施例中用于双极化相控阵气象雷达的标校系统的工作侧视图;图4为一个实施例中双极化相控阵气象雷达的第1波束的校准效果示意图。
具体实施方式
15.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
16.本技术提供了一种用于双极化相控阵气象雷达的标校方法,该方法实施于一标校系统,包括两架无人机,通过细绳固定在两架无人机之间的金属球,以及待标校的双极化相控阵气象雷达,各无人机以及金属球均设置有定位装置,标校方法包括:通过控制无人机使得无人机和金属球在空中呈现无人机-金属球-无人机的“v”字型,根据定位装置调整无人机和金属球的位置,使得两个无人机之间的连线与待标校的双极化相控阵气象雷达波束垂直,且两个无人机分别在主波束两侧的第一零陷位置,金属球在主波束的中心线上,控制待标校的双极化相控阵气象雷达对金属球进行小范围水平扇扫,且每次扫描后,控制两架无人机同时上升预设距离直至扫描结束,获取待标校的双极化相控阵气象雷达的回波数据,根据回波数据计算得到的实测数据,根据实测数据与理论数据之间的差值对待标校的双极化相控阵气象雷达进行校准。
17.在本实施例中,标校方法包括两个部分,一个部分实施待标校的雷达(指双极化相控阵气象雷达)对金属球进行扫描,另一个部分是对雷达扫描后得到的回波数据进行计算的部分。
18.在雷达进行扫描的部分中,为了减少金属球在空中容易晃动的问题,在本实施例中,由两架无人机1通过细绳2固定金属球3,使其在空中水平位置保持平稳,以避免由于金属球3晃动而产生误差,如图1所示。
19.为更好地发挥双无人机吊球的标校效果,可通过雷达找到无地杂波区域作为无人机起飞位置。
20.进一步的,各无人机1与金属球3之间的距离相等。
21.由于雷达在对金属球3进行扇扫时,无人机1本身的散射回波也会对雷达标定结果造成影响,在本实施例中,通过控制无人机1使其分别位于雷达主波束两侧的第一零陷位置,以减少其自身散射对标校结果的影响。
22.具体的,根据定位装置调整无人机1和金属球3的位置,首先调整无人机1与雷达之间水平距离,再调整两无人机1之间的连线距离分别到达预设值。在这里无人机1和雷达之间的距离也可以提前设置,则可以通过下式预先计算出两架无人机1之间的水平距离:(1)在公式(1)中,为无人机1与雷达之间的水平距离,为双极化相控阵气象雷达在方位维的3db波束宽度,两个第一零陷位置之间的角度约为,如图2所示。
23.这样,两架无人机1分别落在波束的零陷位置,且金属球3设置于雷达主波束的中线上,使得在后续对金属球3进行扫描时,通过同步上升使得小球可以在期待俯仰维各波束中心依次停留。
24.进一步的,为避免两架无人机1相互拉扯的风险,固定在所述无人机1与金属球3之间的细绳2长度为1.1 至1.4 。
25.如图3所示,当无人机1升空后,雷达使用小范围水平扇扫模式,每次扫描之后,两
架无人机1同时上升预设距离,预设距离通过下式计算得到:(2)在公式(2)中,为双极化相控阵气象雷达从低仰角到高仰角波束的俯仰维的3db波束宽度,为每个俯仰维波束被采样的次数。
26.通过双无人机1的同时上升带动金属球3上升,可以依次遍历双极化相控阵气象雷达俯仰向上的波束。
27.如图4所示,为本实施例中双极化相控阵气象雷达第1个波束的校准测量效果,从图中可以依次看到3个目标,分别是无人机1、金属球3和无人机1,通过本方法的实施,可以将无人机1和金属球3从方位维上分开。
28.在本方法的第二部分中,可根据雷达的回波数据计算出多个实测数据,包括待标校的双极化相控阵气象雷达各个波束的双通道反射率因子、差分放射率以及校准差分相位。
29.具体的,在计算雷达各个波束的双通道反射率因子时,假设金属球3的半径为,则其雷达后向散射截面积为:(3)因此根据雷达方程:(4)可以计算得到金属球3的理论回波功率,在公式(4)中,为发射脉冲功率,为天线增益,为波长,为雷达距离金属球3的距离。对计算得到的金属球3理论回波功率取对数为:(5)在公式(5)中,的单位为dbm。
30.雷达的常数可以表示为:(6)在公式(6)中,为雷达的水平波束宽度,为雷达的垂直波束宽度,为除大气损耗外的系统总损耗,为雷达发射功率。
31.由和雷达常数可以计算得到金属球3的理论反射率因子为:(7)在公式(7)中,为电磁波在大气传播的每公里损耗。
32.雷达经过接收量化h通道和v通道的回波功率可以得到雷达系统测量出的h通道的反射率因子和v通道的反射率因子,对比双无人机挂载的金属球3的可以获得两个通道的反射率因子的校准因子。h通道的校准因子和v通道的校准因子为:
(8)(9)这样可以通过校准因子以及校准因子分别对雷达的h通道和v通道进行校准。
33.在计算差分放射率以及校准差分相位时,相控阵气象雷达的反射率为,雷达h通道和v通道的反射率和可以通过雷达采集的iq数据来估计,具体为:(10)(11)在公式(10)和(11)中,和是相控阵气象雷达h通道的iq回波数据,和是相控阵气象雷达v通道的iq回波数据。则相控阵气象雷达实测得到的金属球3差分反射率的对数形式为:(12)标准金属球3的反射率和理论上相等,即。通过比较相控阵气象雷达测量金属球3得到的差分反射率实测值与理论差分反射率值可以得到相控阵的差分反射率校准因子为:(13)相控阵气象雷达实测得到的金属球3差分传播相位为:(14)在公式(14)中,,表示为复数的相位角度。理论上标准金属球3的差分传播相位为0,即。通过比较相控阵气象雷达测量金属球3得到的差分传播相位与理论差分传播相位值可以得到相控阵的差分反射率校准因子为:(15)上述用于双极化相控阵气象雷达的标校方法,通过利用两架无人机将金属球悬吊在空中,以解决金属球容易晃动的问题,并控制两架无人机分别处于雷达的主波束两侧的第一零陷位置以解决对雷达进行校准时容易受无人机平台杂波影响的问题,从而使得本方法具有成本低、适用范围广、灵活机动、标校体稳定和无人机体本身散射回波能量对标定结果影响小的优点。
34.在本技术中还提供了一种用于双极化相控阵气象雷达的标校系统,包括两架无人机,通过细绳固定在两架无人机之间的金属球,以及待标校的双极化相控阵气象雷达,各所述无人机以及金属球均设置有定位装置,该标校系统通过实施上述的用于双极化相控阵气象雷达的标校方法以实现双极化相控阵气象雷达的标校。
35.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
36.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1