一种大范围室内场景下的多源融合定位方法及装置与流程
1.本发明涉及定位技术领域,尤其涉及的是一种大范围室内场景下的多源融合定位方法及装置。
背景技术:
2.基于位置的服务在智能终端的应用中占据着不可或缺的作用,而如何精确的获取大范围的城市室内空间中用户连续而可靠的位置信息成为关键。然而在复杂城市室内环境中,行人的运动具有复杂性和多样性的特征,并且室内空间中缺乏像室外卫星定位一样统一的定位源,导致实现高精度的室内定位仍然是行人定位领域的难题之一。
3.因此,现有技术存在缺陷,有待改进与发展。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种大范围室内场景下的多源融合定位方法及装置,旨在解决现有技术中进行室内定位时精度较差的问题。
5.本发明解决技术问题所采用的技术方案如下:
6.一种大范围室内场景下的多源融合定位方法,包括:
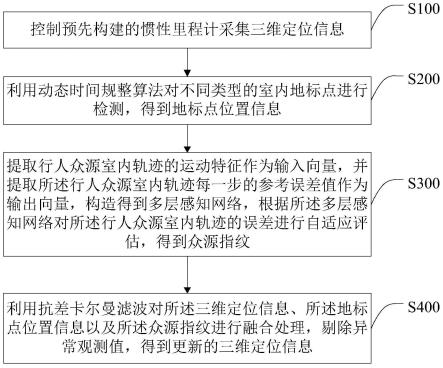
7.控制预先构建的惯性里程计采集三维定位信息;
8.利用动态时间规整算法对不同类型的室内地标点进行检测,得到地标点位置信息;
9.提取行人众源室内轨迹的运动特征作为输入向量,并提取所述行人众源室内轨迹每一步的参考误差值作为输出向量,构造得到多层感知网络,根据所述多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹;
10.利用抗差卡尔曼滤波对所述三维定位信息、所述地标点位置信息以及所述众源指纹进行融合处理,剔除异常观测值,得到更新的三维定位信息。
11.在一种实现方式中,所述惯性里程计的构建步骤包括:
12.构造加速度计和陀螺仪量测的数据处理模型为:
13.其中,所述表示加速度计的建模输出,所述表示陀螺仪的建模输出,所述ak表示加速度计的理想输出,所述wk表示陀螺仪的理想输出,所述表示加速度计零偏,所述表示陀螺仪零偏,所述为旋转矩阵,所述gw为重力向量,所述na为加速度计量测的高斯白噪声,所述nw为陀螺仪量测的高斯白噪声;
14.将所述加速度计零偏和所述陀螺仪零偏进行建模,建模为服从高斯分布的零偏随
机游走的过程,表示为:
15.其中,所述表示加速度计零偏的随机游走值,所述表示陀螺仪零偏的随机游走值,服从高斯分布。
16.在一种实现方式中,所述控制预先构建的惯性里程计采集三维定位信息,包括:
17.利用建模后的加速度计采集当前时刻的加速度值,以及利用建模后的陀螺仪采集当前时刻的角速度值;
18.将所述加速度值和所述角速度值进行预积分处理,得到预积分结果;
19.所述预积分结果的计算公式为:
[0020][0021][0022][0023]
其中,所述表示预积分得出的三维位置信息,所述表示预积分得出的三维速度信息,所述表示预积分得出的三维姿态信息,所述为旋转矩阵,所述ω为反对称矩阵,所述k表示时间戳,所述dk表示根据时间区间求解积分,所述表示上一时刻的三维姿态信息;
[0024]
根据所述加速度计零偏和所述陀螺仪零偏对所述预积分结果进行修正,计算得到三维定位信息,所述三维定位信息包括:三维位置信息、三维速度信息和三维姿态信息;
[0025]
所述三维定位信息的计算公式为:
[0026]
其中,所述表示修正后的三维位置信息,所述表示修正后的三维速度信息,所述表示修正后的三维姿态信息;所述表示加速度计零偏,所述表示陀螺仪零偏,所述δ表示求导数;和表示对应的雅克比矩阵。
[0027]
在一种实现方式中,所述利用动态时间规整算法对不同类型的室内地标点进行检测,得到地标点位置信息,包括:
[0028]
预先构建无线测距距离观测模型为:l
observed
=l
ftm
+dn+d
random
;
[0029]
其中,所述l
observed
为无线基站实际观测的无线测距值,所述l
ftm
为真实距离值,所述dn为非视距误差,所述d
random
为随机误差;
[0030]
预先构建蓝牙节点距离观测模型为:
[0031]
其中,所述为根据蓝牙信号强度计算出的蓝牙节点距离值,所述为对应的信号强度值,所述μ为缩放因子,所述为参考信号强度值,所述δ为信号强度观测误差;
[0032]
获取根据所述无线测距距离观测模型得到的当前时刻与起始时刻的无线测距值以及根据所述蓝牙节点距离观测模型得到的当前时刻与起始时刻的蓝牙节点距离值;
[0033]
根据所述无线测距值,利用动态时间规整算法匹配并输出无线基站位置观测值;
[0034]
根据所述蓝牙节点距离值,利用动态时间规整算法匹配并输出蓝牙节点位置观测值;
[0035]
所述动态时间规整算法为:
[0036]
dtw(d
refer
,dk)
[0037]
=dist(bn,cm)+min[d(b
n-1
,cm),d(bn,c
m-1
),d(b
n-1
,c
m-1
)];
[0038]
其中,所述d
refer
为参考序列,所述dk为实时采集的序列值,所述bn表示参考序列中的每一个元素值,所述cm表示实时采集的序列中的每一个元素值。
[0039]
在一种实现方式中,所述提取行人众源室内轨迹的运动特征作为输入向量,并提取所述行人众源室内轨迹每一步的参考误差值作为输出向量,构造得到多层感知网络,根据所述多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹,包括:
[0040]
提取行人众源室内轨迹中包括的行人每一步步态过程中的步长信息sk和航向信息
[0041]
提取当前时刻累积的步数值ηk;
[0042]
提取当前时刻累积的航向变化值
[0043]
提取当前时刻的行走距离占总距离的比值
[0044]
提取当前时刻的用时占总时长的比值ξ
t
(k)=t(k)/t
total
;
[0045]
提取当前时刻的累计步数占总步数的比值ξs(k)=step(k)/step
total
;
[0046]
根据sk、ηk、δθ、ξd、ξ
t
和ξs构造多层感知网络,并计算相应的代价函数;
[0047]
所述代价函数的计算公式为:其中,所述α表示待训练的网络权值,所述β表示待训练的网络偏置,m为网络节点数,g(x)为网络输出,η为参考真值;
[0048]
利用随机梯度下降法求解最优的多层感知网络的网络参数值;
[0049]
最优的网络参数值的求解模型为:
[0050]
其中,αk表示迭代中的权值,β
l
表示迭代中的偏置,ν表示迭代步长值;
[0051]
利用求解后的多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹。
[0052]
在一种实现方式中,利用抗差卡尔曼滤波对所述三维定位信息、所述地标点位置信息以及所述众源指纹进行融合处理,剔除异常观测值,得到更新的三维定位信息,包括:
[0053]
根据所述三维定位信息计算当前时刻与起始时刻之间的传感器测距值;
[0054]
将所述无线测距值和所述传感器测距值的差值作为距离观测量;
[0055]
将所述无线基站位置观测值作为第一位置观测量,将所述蓝牙节点位置观测值作为第二位置观测量;
[0056]
计算抗差卡尔曼滤波中的方差膨胀因子,根据所述方差膨胀因子得到协方差矩阵,所述方差膨胀因子用于控制所述距离观测量、所述第一位置观测量及所述第二位置观测量的权重;
[0057]
构建抗差卡尔曼滤波状态量预测公式;
[0058]
根据抗差卡尔曼滤波状态量预测公式对所述距离观测量、所述第一位置观测量及所述第二位置观测量进行更新,得到抗差卡尔曼滤波观测更新方程;
[0059]
根据抗差卡尔曼滤波观测更新方程得到所述距离观测量、所述第一位置观测量及所述第二位置观测量对应的观测更新值;
[0060]
根据所述观测更新值计算满足状态预测误差和观测残差之和最小的最优状态参数;
[0061]
根据所述最优状态参数计算最优的状态更新量,得到更新的三维定位信息。
[0062]
在一种实现方式中,所述距离观测量的计算公式为:
[0063][0064]
其中,所述δz
m,range
表示观测残差量,所述d
mems,m
表示传感器测距值,所述d
wifi,m
表示无线测距值;
[0065]
所述第一位置观测量表示为:所述表示无线基站位置观测值,所述表示三维位置信息,n
wifi
表示无线基站的观测噪声;
[0066]
所述第二位置观测量表示为:所述表示蓝牙节点位置观测值,所述表示三维位置信息,n
ble
表示蓝牙节点的观测噪声;
[0067]
所述方差膨胀因子表示为:其中,所述vi表示距离观测量、第一位置观测量或者第二位置观测量,所述表示与各个观测量对应的协方差值,所述c为与各个观测量对应的阈值;
[0068]
所述抗差卡尔曼滤波状态量预测公式表示为:
[0069]
所述为状态量预测值,φ
k,k-1
为状态更新矩阵,为当前时刻状态量;
[0070]
所述抗差卡尔曼滤波观测更新方程表示为:ak为观测方程,lk为各个观测量;
[0071]
计算满足状态预测误差和观测残差之和最小的最优状态参数表示为:所述为协方差矩阵,所述vk为各个观测更新值,αk为抗差因子;
[0072]
最优的状态更新量计算公式表示为:
[0073][0074]
本发明还提供一种大范围室内场景下的多源融合定位装置,包括:
[0075]
采集模块,用于控制预先构建的惯性里程计采集三维定位信息;
[0076]
检测模块,用于利用动态时间规整算法对不同类型的室内地标点进行检测,得到地标点位置信息;
[0077]
构造模块,用于提取行人众源室内轨迹的运动特征作为输入向量,并提取所述行人众源室内轨迹每一步的参考误差值作为输出向量,构造得到多层感知网络,根据所述多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹;
[0078]
融合处理模块,用于利用抗差卡尔曼滤波对所述三维定位信息、所述地标点位置信息以及所述众源指纹进行融合处理,剔除异常观测值,得到更新的三维定位信息。
[0079]
本发明还提供一种终端,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的大范围室内场景下的多源融合定位程序,所述大范围室内场景下的多源融合定位程序被所述处理器执行时实现如上所述的大范围室内场景下的多源融合定位方法的步骤。
[0080]
本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序能够被执行以用于实现如上所述的大范围室内场景下的多源融合定
位方法的步骤。
[0081]
本发明所提供的一种大范围室内场景下的多源融合定位方法及装置,包括:控制预先构建的惯性里程计采集三维定位信息;利用动态时间规整算法对不同类型的室内地标点进行检测,得到地标点位置信息;提取行人众源室内轨迹的运动特征作为输入向量,并提取所述行人众源室内轨迹每一步的参考误差值作为输出向量,构造得到多层感知网络,根据所述多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹;利用抗差卡尔曼滤波对所述三维定位信息、所述地标点位置信息以及所述众源指纹进行融合处理,剔除异常观测值,得到更新的三维定位信息。本发明综合考虑影响大范围室内空间下多源融合定位精度的重要因素,并对众源轨迹进行建模和评估,消除外部环境的干扰;同时设计了统一的抗差卡尔曼滤波对不同的定位源进行有机组合,最终实现对大范围室内空间内行人三维位置的有效估计。
附图说明
[0082]
图1是本发明中大范围室内场景下的多源融合定位方法较佳实施例的流程图。
[0083]
图2是地标点检测示意图。
[0084]
图3是多层感知网络结构示意图。
[0085]
图4是惯导里程计输出的轨迹和传统方法的轨迹对比图。
[0086]
图5是惯导里程计输出的轨迹和传统方法的轨迹的定位精度对比图。
[0087]
图6是动态时间规整算法中参考分布和实时分布效果图。
[0088]
图7是通过动态时间规整算法中匹配结果示意图。
[0089]
图8是不同模型估计的轨迹效果对比图。
[0090]
图9是不同模型估计的轨迹定位精度对比图。
[0091]
图10是本发明中大范围室内场景下的多源融合定位装置的较佳实施例的功能原理框图。
[0092]
图11是本发明中终端的功能原理框图。
具体实施方式
[0093]
为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0094]
在当前,由于城市室内场景的复杂性和多样性,导致现有的基于智能终端的大范围城市室内场景下的多源融合定位技术存在以下不足:1)依靠智能终端惯性传感器的定位方法存在随着时间累积的发散误差;2)缺乏行之有效的方法评估众源轨迹的精度和可靠性;3)单一的无线信号源难以覆盖全部的室内场景,且缺乏统一的多源融合算法架构。
[0095]
针对上述不足,本发明提出一种面向智能终端的大范围室内场景下的多源融合定位方法,以提升大范围城市室内空间中智能终端的多源融合定位精度及鲁棒性,同时使用多层感知网络对众源轨迹误差进行评估和建模。
[0096]
在本发明实施例中,所述大范围室内场景下的多源融合定位方法应用于计算机、智能手机、物联网终端等设备,通过采集,处理,融合多源传感器和无线信号以及二维码数
据,对行人室内的轨迹进行建模,同时使用多层感知网络对获取的众源轨迹的误差进行估自适应评估,然后使用抗差卡尔曼滤波对多源数据进行融合,最终实现大范围城市室内空间中行人轨迹的高精度测量。
[0097]
请参见图1,图1是本发明中大范围室内场景下的多源融合定位方法的流程图。如图1所示,本发明实施例所述的大范围室内场景下的多源融合定位方法包括以下步骤:
[0098]
步骤s100、控制预先构建的惯性里程计采集三维定位信息。
[0099]
具体地,本发明提出了一种新的惯性里程计,将惯性导航机械编排算法与多级观测向量相结合,以降低磁干扰和外部加速度的影响。
[0100]
在一种实现方式中,所述惯性里程计的构建步骤包括:
[0101]
构造加速度计和陀螺仪量测的数据处理模型为:
[0102]
其中,所述表示加速度计的建模输出,所述表示陀螺仪的建模输出,所述ak表示加速度计的理想输出,所述wk表示陀螺仪的理想输出,所述表示加速度计零偏,所述表示陀螺仪零偏,所述为旋转矩阵,所述gw为重力向量,所述na为加速度计量测的高斯白噪声,所述nw为陀螺仪量测的高斯白噪声;
[0103]
将所述加速度计零偏和所述陀螺仪零偏进行建模,建模为服从高斯分布的零偏随机游走的过程,表示为:
[0104]
其中,所述表示加速度计零偏的随机游走值,所述表示陀螺仪零偏的随机游走值,服从高斯分布。
[0105]
在一种实施例中,所述步骤s100具体包括:
[0106]
利用建模后的加速度计采集当前时刻的加速度值,以及利用建模后的陀螺仪采集当前时刻的角速度值;
[0107]
将所述加速度值和所述角速度值进行预积分处理,得到预积分结果;
[0108]
所述预积分结果的计算公式为:
[0109][0110]
其中,所述表示预积分得出的三维位置信息,所述表示预积分得出的三维速度信息,所述表示预积分得出的三维姿态信息,所述为旋转矩阵,所述ω为反对称矩阵,所述k表示时间戳,所述dk表示根据时间区间求解积分,所述表示上一时刻的三维姿态信息;
[0111]
根据所述加速度计零偏和所述陀螺仪零偏对所述预积分结果进行修正,计算得到三维定位信息,所述三维定位信息包括:三维位置信息、三维速度信息和三维姿态信息;
[0112]
所述三维定位信息的计算公式为:
[0113]
其中,所述表示修正后的三维位置信息,所述表示修正后的三维速度信息,所述表示修正后的三维姿态信息;所述表示加速度计零偏,所述表示陀螺仪零偏,所述δ表示求导数;和表示对应的雅克比矩阵。
[0114]
所述步骤s100之后为:步骤s200、利用动态时间规整算法对不同类型的室内地标点进行检测,得到地标点位置信息。
[0115]
具体地,使用动态时间规整算法对不同类型的室内地标点进行检测,如图2所示,包含无线基站,蓝牙信标等,地标点检测结果用以为惯性里程计提供绝对的位置参考信息。
[0116]
在一种实现方式中,所述步骤s200具体包括:
[0117]
预先构建无线测距距离观测模型为:l
observed
=l
ftm
+dn+d
random
;
[0118]
其中,所述l
observed
为无线基站实际观测的无线测距值,所述l
ftm
为真实距离值,所述dn为非视距误差,所述d
random
为随机误差;
[0119]
预先构建蓝牙节点距离观测模型为:
[0120]
其中,所述为根据蓝牙信号强度计算出的蓝牙节点距离值,所述为对应的信号强度值,所述μ为缩放因子,所述为参考信号强度值,所述δ为信号强度观测误差;
[0121]
获取根据所述无线测距距离观测模型得到的当前时刻与起始时刻的无线测距值以及根据所述蓝牙节点距离观测模型得到的当前时刻与起始时刻的蓝牙节点距离值;
[0122]
根据所述无线测距值,利用动态时间规整算法匹配并输出无线基站位置观测值;
[0123]
根据所述蓝牙节点距离值,利用动态时间规整算法匹配并输出蓝牙节点位置观测值;
[0124]
所述动态时间规整算法为:
[0125]
dtw(d
refer
,dk)
[0126]
=dist(bn,cm)+min[d(b
n-1
,cm),d(bn,c
m-1
),d(b
n-1
,c
m-1
)];
[0127]
其中,所述d
refer
为参考序列,所述dk为实时采集的序列值,所述bn表示参考序列中的每一个元素值,所述cm表示实时采集的序列中的每一个元素值。
[0128]
所述步骤s200之后为:步骤s300、提取行人众源室内轨迹的运动特征作为输入向量,并提取所述行人众源室内轨迹每一步的参考误差值作为输出向量,构造得到多层感知网络,根据所述多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹。
[0129]
具体地,提取行人众源室内轨迹的运动特征作为输入向量,并提取每一步的参考误差值作为输出向量,用来构造多层感知器对众源轨迹的误差进行自适应评估。多层感知网络如图3所示。
[0130]
在一种实现方式中,所述步骤s300具体包括:
[0131]
提取行人众源室内轨迹中包括的行人每一步步态过程中的步长信息sk和航向信息
[0132]
提取当前时刻累积的步数值ηk;
[0133]
提取当前时刻累积的航向变化值
[0134]
提取当前时刻的行走距离占总距离的比值
[0135]
提取当前时刻的用时占总时长的比值ξ
t
(k)=t(k)/t
total
;
[0136]
提取当前时刻的累计步数占总步数的比值ξs(k)=step(k)/step
total
;
[0137]
根据sk、ηk、δθ、ξd、ξ
t
和ξs构造多层感知网络,并计算相应的代价函数;
[0138]
所述代价函数的计算公式为:其中,所述α表示待训练的网络权值,所述β表示待训练的网络偏置,m为网络节点数,g(x)为网络输出,η为参考真值;
[0139]
利用随机梯度下降法求解最优的多层感知网络的网络参数值;
[0140]
最优的网络参数值的求解模型为:
[0141]
其中,αk表示迭代中的权值,β
l
表示迭代中的偏置,ν表示迭代步长值;
[0142]
利用求解后的多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹。
[0143]
所述步骤s300之后为:步骤s400、利用抗差卡尔曼滤波对所述三维定位信息、所述地标点位置信息以及所述众源指纹进行融合处理,剔除异常观测值,得到更新的三维定位信息。
[0144]
具体地,使用抗差卡尔曼滤波融合惯导里程计,无线测距,众源指纹,和地标点检测结果,并自适应剔除异常观测值,最终实现大范围场景下不同定位源的有机组合和高精度定位。
[0145]
在一种实现方式中,所述步骤s400具体包括:
[0146]
根据所述三维定位信息计算当前时刻与起始时刻之间的传感器测距值;
[0147]
在以惯性里程计作为状态量的基础上,将所述无线测距值和所述传感器测距值的差值作为距离观测量;
[0148]
在以惯性里程计作为状态量的基础上,把地标点检测算法检测到的无线基站的位
置作为第一位置观测量;
[0149]
在以惯性里程计作为状态量的基础上,把地标点检测算法检测到的蓝牙基站的位置作为第二位置观测量;
[0150]
设计抗差卡尔曼滤波中的方差膨胀因子用于控制观测量的权重;
[0151]
构建抗差卡尔曼滤波状态量预测公式;
[0152]
根据抗差卡尔曼滤波状态量预测公式对所述距离观测量、所述第一位置观测量及所述第二位置观测量进行更新,得到抗差卡尔曼滤波观测更新方程;
[0153]
根据抗差卡尔曼滤波观测更新方程得到所述距离观测量、所述第一位置观测量及所述第二位置观测量对应的观测更新值;
[0154]
根据所述观测更新值计算满足状态预测误差和观测残差之和最小的最优状态参数;
[0155]
根据所述最优状态参数计算最优的状态更新量,得到更新的三维定位信息。
[0156]
在一种实施例中,所述距离观测量的计算公式为:
[0157]
其中,所述δz
m,range
表示观测残差量,所述d
mems,m
表示传感器测距值,所述d
wifi,m
表示无线测距值;
[0158]
所述第一位置观测量表示为:所述表示无线基站位置观测值,所述表示三维位置信息,n
wifi
表示无线基站的观测噪声;
[0159]
所述第二位置观测量表示为:所述表示蓝牙节点位置观测值,所述表示三维位置信息,n
ble
表示蓝牙节点的观测噪声;
[0160]
所述方差膨胀因子表示为:其中,所述vi表示距离观测量、第一位置观测量或者第二位置观测量,所述表示与各个观测量对应的协方差值,所述c为与各个观测量对应的阈值;
[0161]
所述抗差卡尔曼滤波状态量预测公式表示为:
[0162]
所述为状态量预测值,φ
k,k-1
为状态更新矩阵,为当前时刻状态量;
[0163]
所述抗差卡尔曼滤波观测更新方程表示为:ak为观测方程,lk为各个观测量;
[0164]
计算满足状态预测误差和观测残差之和最小的最优状态参数表示为:
所述为协方差矩阵,所述vk为各个观测更新值,αk为抗差因子;
[0165]
最优的状态更新量计算公式表示为:
[0166][0167]
与现有的大范围城市室内空间中的多源融合定位技术相比,本发明实施例综合考虑众源轨迹数据的处理,评估和融合,不同定位源的有机组合,累积定位误差的消除等问题:
[0168]
1)提出了一种新的惯性里程计,将惯性导航机械编排算法与多级观测向量相结合,以降低磁干扰和外部加速度的影响;
[0169]
2)使用动态时间规整算法对不同类型的室内地标点进行检测,包含无线基站,蓝牙信标等,地标点检测结果用以为惯性里程计提供绝对的位置参考信息;
[0170]
3)提取行人众源室内轨迹的运动特征作为输入向量,并提取每一步的参考误差值作为输出向量,用来构造多层感知器对众源轨迹的误差进行自适应评估;
[0171]
4)使用抗差卡尔曼滤波融合惯导里程计,无线测距,众源指纹,和地标点检测结果,并自适应剔除异常观测值,最终实现大范围场景下不同定位源的有机组合和高精度定位。
[0172]
通过以上四点,本发明实施例能够取得较优的大范围室内场景下的行人轨迹的多源融合定位结果。
[0173]
通过比较本发明提出的惯导里程计和传统的行人航迹推算算法的估计结果,如图4和图5所示。可以看出,本专利提出的惯导里程计在定位轨迹的精度指标上领先于传统的算法,在15-20分钟运动时长和75%累计误差分布情况下定位精度可达到5.45米。
[0174]
图6展示了使用基于动态时间规整的地标点检测算法的采集的实时分布和理想分布对比图。图7展示了使用动态时间规整进行实时的地标点检测所计算出的相似度结果,从图中可以看到,随着行人距离地标点测距值的变化,计算出的相似度结果呈现先降后升的情况,当相似度结果最低的时候,即为到达了距离地标点最近的结果,配合设定的阈值即可实现地标点位置提取。
[0175]
最终实现的不同定位源组合的定位轨迹效果如图8所示,从图中可以看出,使用多源融合的定位方法,相比单一的室内定位源,在定位精度和定位的鲁棒性上均有明显的提升,可有效地实现在三维室内场景中的精确定位。从图9中可以看到,使用单一的惯导里程计的方法,在75%累积误差分布下精度可达到10.94米;使用惯导里程计,二维码,蓝牙组合的方式,在75%累积误差分布下精度可达到4.41米;使用惯导里程计,二维码,蓝牙,无线指纹组合的方式,在75%累积误差分布下精度可达到3.55米;使用惯导里程计,二维码,蓝牙,无线指纹,无线测距组合的方式,在75%累积误差分布下精度可达到1.66米,在定位精度上提升明显。
[0176]
进一步地,如图10所示,基于上述大范围室内场景下的多源融合定位方法,本发明还相应提供了一种大范围室内场景下的多源融合定位装置,包括:
[0177]
采集模块100,用于控制预先构建的惯性里程计采集三维定位信息;
[0178]
检测模块200,用于利用动态时间规整算法对不同类型的室内地标点进行检测,得到地标点位置信息;
[0179]
构造模块300,用于提取行人众源室内轨迹的运动特征作为输入向量,并提取所述行人众源室内轨迹每一步的参考误差值作为输出向量,构造得到多层感知网络,根据所述多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹;
[0180]
融合处理模块400,用于利用抗差卡尔曼滤波对所述三维定位信息、所述地标点位置信息以及所述众源指纹进行融合处理,剔除异常观测值,得到更新的三维定位信息。
[0181]
如图11所示,本发明还提供一种终端,其特征在于,包括:存储器20、处理器10及存储在所述存储器20上并可在所述处理器10上运行的大范围室内场景下的多源融合定位程序30,所述大范围室内场景下的多源融合定位程序30被所述处理器10执行时实现如上所述的大范围室内场景下的多源融合定位方法的步骤。
[0182]
本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序能够被执行以用于实现如上所述的大范围室内场景下的多源融合定位方法的步骤。
[0183]
综上所述,本发明公开的一种大范围室内场景下的多源融合定位方法及装置,包括:控制预先构建的惯性里程计采集三维定位信息;利用动态时间规整算法对不同类型的室内地标点进行检测,得到地标点位置信息;提取行人众源室内轨迹的运动特征作为输入向量,并提取所述行人众源室内轨迹每一步的参考误差值作为输出向量,构造得到多层感知网络,根据所述多层感知网络对所述行人众源室内轨迹的误差进行自适应评估,得到众源指纹;利用抗差卡尔曼滤波对所述三维定位信息、所述地标点位置信息以及所述众源指纹进行融合处理,剔除异常观测值,得到更新的三维定位信息。本发明综合考虑影响大范围室内空间下多源融合定位精度的重要因素,并对众源轨迹进行建模和评估,消除外部环境的干扰;同时设计了统一的抗差卡尔曼滤波对不同的定位源进行有机组合,最终实现对大范围室内空间内行人三维位置的有效估计。
[0184]
应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1