一种定时采样数据向整周期采样数据的转换方法及系统与流程
1.本发明涉及一种定时采样数据向整周期采样数据的转换方法及系统,属于旋转机械故障诊断领域。
背景技术:
2.旋转机械故障诊断依赖于振动信号的采集,目前常用的信号采集方式有定时采样与整周期采样。相较于定时采样,整周期采样可以减少旋转机械振动信号傅里叶变换时的泄漏效应与栅栏效应,能够实现傅里叶变换后幅值与相位的准确识别,采用整周期采样后的信号可以更加准确地实现诸如动平衡、不对中等典型的与转速相关的故障识别与诊断。但是由于整周期采样需要采用锁相环等技术,导致硬件上实现代价高、难度大,因此目前大多数采集系统仅实现了定时采样,不具备整周期采样功能。
技术实现要素:
3.本发明提供了一种定时采样数据向整周期采样数据的转换方法及系统,解决了背景技术中披露的问题。
4.为了解决上述技术问题,本发明所采用的技术方案是:
5.一种定时采样数据向整周期采样数据的转换方法,包括:
6.获取定时采样的键相信号和振动信号;
7.根据键相信号,获取键相位置时刻;
8.根据键相位置时刻和转子运动方程,获取定时采样的时间;
9.根据定时采样的时间和定时采样的振动信号,获取整周期采样的振动信号。
10.根据键相信号,获取键相位置时刻,包括:
11.根据键相信号,采用局域半径方法获取键相位置时刻。
12.局域半径方法为键相信号中的点满足预设规则、且该点的预设局域半径没有其他点满足预设规则,则该点对应时刻为键相位置时刻;
13.其中,预设规则为:前一个点的信号值小于阈值,自身的信号值大于阈值。
14.根据定时采样的时间和定时采样的振动信号,获取整周期采样的振动信号,包括:
15.根据定时采样的时间和定时采样的振动信号,采用样条插值方法获取整周期采样的振动信号。
16.一种定时采样数据向整周期采样数据的转换系统,包括:
17.信号获取模块:获取定时采样的键相信号和振动信号;
18.键相位置时刻获取模块:根据键相信号,获取键相位置时刻;
19.采样时间获取模块:根据键相位置时刻和转子运动方程,获取定时采样的时间;
20.整周期采样信号获取模块:根据定时采样的时间和定时采样的振动信号,获取整周期采样的振动信号。
21.键相位置时刻获取模块:根据键相信号,采用局域半径方法获取键相位置时刻。
22.局域半径方法为键相信号中的点满足预设规则、且该点的预设局域半径没有其他点满足预设规则,则该点对应时刻为键相位置时刻;
23.其中,预设规则为:前一个点的信号值小于阈值,自身的信号值大于阈值。
24.整周期采样信号获取模块:根据定时采样的时间和定时采样的振动信号,采用样条插值方法获取整周期采样的振动信号。
25.一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行定时采样数据向整周期采样数据的转换方法。
26.一种计算设备,包括一个或多个处理器、一个或多个存储器以及一个或多个程序,其中一个或多个程序存储在所述一个或多个存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行定时采样数据向整周期采样数据的转换方法的指令。
27.本发明所达到的有益效果:本发明通过定时采样的键相信号获取键相位置时刻,基于键相位置时刻获取定时采样的时间,根据定时采样的时间和定时采样的振动信号,获取整周期采样的振动信号,有效实现了定时采样数据向整周期采样数据的转换,可使定时采样采集系统实现整周期采样功能,并且本发明可通过软件实现,无需改变定时采样采集系统的硬件结构,不增加硬件投资。
附图说明
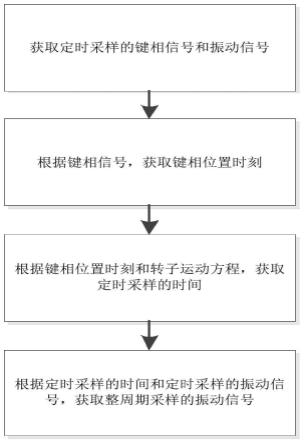
28.图1为转换方法的流程图;
29.图2为定时采样的键相信号和振动信号;
30.图3为局域半径方法的第一示例;
31.图4为局域半径方法的第二示例
32.图5为定时采样信号示例;
33.图6为转换后的整周期采样信号示例。
具体实施方式
34.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
35.如图1所示,一种定时采样数据向整周期采样数据的转换方法,包括以下步骤:
36.步骤1,获取定时采样的键相信号和振动信号;
37.步骤2,根据键相信号,获取键相位置时刻;
38.步骤3,根据键相位置时刻和转子运动方程,获取定时采样的时间;
39.步骤4,根据定时采样的时间和定时采样的振动信号,获取整周期采样的振动信号。
40.上述方法通过定时采样的键相信号获取键相位置时刻,基于键相位置时刻获取定时采样的时间,根据定时采样的时间和定时采样的振动信号,获取整周期采样的振动信号,有效实现了定时采样数据向整周期采样数据的转换,可使定时采样采集系统实现整周期采样功能,并且该方法可通过软件实现,无需改变定时采样采集系统的硬件结构,不增加硬件
投资。
41.假设在圆周方向仅有一个键相点,变转速过程中,定时采样的情况如图2所示:
42.1)由键相信号获得的信号数组为:x={x1,x2,...,xn},n为整数,为采样时刻数;
43.2)任一其它测点信号数组为:表示测点j在采样时刻n时采集的振动信号;
44.3)定时采样的时间间隔为δ。
45.假设任意连续的三个键相点(即键相位置)之间转子的角加速度保持恒定,则转子运动方程可以满足:
46.θ(t)=b0+b1t+b2t247.其中,θ(t)的转子的运动方程,即转子的运动旋转角度与时间的关系,参数b0、b1、b2构成列向量
48.转子每转一周,同步整周期采样点数为c(c为正整数,通常为2的正整数次幂),则整周期采样点对应的转子角度数组为
49.针对键相信号,采用局域半径方法获取键相位置时刻,根据键相位置时刻和转子运动方程,获取定时采样的时间,根据定时采样的时间和定时采样的振动信号,采用样条插值方法获取整周期采样的振动信号。
50.局域半径方法为键相信号中的点满足预设规则、且该点的预设局域半径没有其他点满足预设规则,则该点对应时刻为键相位置时刻;其中,预设规则为:前一个点的信号值小于阈值,自身的信号值大于阈值。
51.为了获得键相位置时刻(即键相点发生的时刻),人为设置了一个阈值thr,当信号的前一个点小于thr,而后一个点大于thr,且在指定时间范围内(局域半径)没有发生类似情况时,那么我们认为后一个点对应时为键相位置时刻。以图3和4为例局域半径为2为例,一个正确的识别为图3案例,当前一个值(612点)小于thr而下一个点(613)大于thr,识别第613个点为键相点,且在第613点为中心的范围内不存在第二个键相点,则第613个点为有效的键相信号。错误的键相识别见图4,其中在第一个识别的键相点为中心的半径为2的范围内,又识别到一次键相点(615点),则第615点舍弃,不被认为是一次键相点识别。
52.上述转换方法的具体的流程可以为:
53.11)获取键相信号阈值:thr=0.5
·
(max(x)-min(x))+mean(x);
54.12)初始化:键相时刻一维数组key为空数组,初始化i=0,有效半径r=const(正整数,常数);
55.13)上升沿检测
[0056][0057]
14)上升沿有效性检测(删除键相数组中错误的键相位置),将有效的键相存储于新的数组newkey中,并再次赋给key(新生产的key数组存储的是有效的键相点对应的索引);
[0058]
键相数组key的大小为m
[0059][0060]
15)判断数组key的大小是否大于2,如果是真,则继续,否则转至110);
[0061]
16)生成键相位置时间数组t=δ
·
key;
[0062]
17)初始化计算条件:
[0063]
列向量:
[0064]
数组ast:为空数组,用以存储单个旋转周期内每个整周期采样点所对应的定时采样时间;
[0065]
数组at:为空数组,用以存储多个连续的旋转周期内整周期采样点所对应的定时采样时间,作为ast数组的连续缓存数组;
[0066]
18)
[0067]
19)生成定时采样的时间数组τ=δ
·
[0,1,...,n-1];
[0068]
110)根据时间数组和测点信号,采用样条插值方法获得at数组对应的采样值。
[0069]
图5为定时采样信号,图6为基于图5中的信号,采样上述方法获得的整周期采样信号。
[0070]
针对目前普遍采用的定时采样采集系统,上述方法实现了从定时采样数据向整周期采样数据的转换,其仅仅对现有系统的软件进行了改进;在软件算法方面:键相位置搜索时,采用了局域半径方法实现了键相位置的准确有效识别;整周期重采样时间点确定时,转子运动方程采用二次函数方法实现了重采样时间点的高效定位;整周期采样时,采用样条函数方法实现了采样点的精确插值。
[0071]
该方法具备明显的节约采集系统硬件开销、节省硬件投资和软件灵活组态的经济技术优势。目前,该方法已应用于南瑞水电公司的ssj-9000水机机组状态监测与分析系统中,并在多个水电站的商业运行中取得了较好的效果。
[0072]
基于相同的技术方案,本发明还公开了上述方法的软件系统,一种定时采样数据向整周期采样数据的转换系统,包括:
[0073]
信号获取模块:获取定时采样的键相信号和振动信号。
[0074]
键相位置时刻获取模块:根据键相信号,采用局域半径方法获取键相位置时刻。
[0075]
局域半径方法为键相信号中的点满足预设规则、且该点的预设局域半径没有其他点满足预设规则,则该点对应时刻为键相位置时刻;其中,预设规则为:前一个点的信号值小于阈值,自身的信号值大于阈值。
[0076]
整周期采样信号获取模块:根据定时采样的时间和定时采样的振动信号,采用样条插值方法获取整周期采样的振动信号。
[0077]
基于相同的技术方案,本发明还公开了一种存储一个或多个程序的计算机可读存
储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行定时采样数据向整周期采样数据的转换方法。
[0078]
基于相同的技术方案,本发明还公开了一种计算设备,包括一个或多个处理器、一个或多个存储器以及一个或多个程序,其中一个或多个程序存储在所述一个或多个存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行定时采样数据向整周期采样数据的转换方法的指令。
[0079]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0080]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0081]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0082]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0083]
以上仅为本发明的实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在申请待批的本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1