一种相位差波前检测的求解方法及系统
1.本发明属于相位差波前检测技术领域,具体涉及一种相位差波前检测的求解方法及系统。
背景技术:
2.光学波前检测对评价成像系统质量至关重要。
3.相位差波前检测是一种重要的检测方法,具有系统结构简单、抗干扰能力强、容易实现的优点,在许多领域都有很好的应用。这种方法不需要额外增加复杂的硬件,它通过成像系统获取若干幅目标图像,每幅目标图像的成像通道都预先引入附加相位,这个附加相位就称为相位差(phase diversity),根据成像模型和成像参数建立目标评价函数,利用非线性优化算法搜索最优解,从而恢复波前相位。
4.然而,如何快速准确获取最优解是相位差波前检测的难题。传统方法一般采用基于梯度的非线性优化算法,搜索目标函数最小值。但是,当目标函数在解空间是非凸函数时,基于梯度的优化算法容易陷入局部极小值或者鞍点,求解结果远远偏离真实值;通过增加优化算法的初始搜索点数量的方式能够提高获取全局最优解的概率,但是处理时间急剧增加。另外,现有方法的步骤大多都较为繁琐,且需要反复调试设置参数。
技术实现要素:
5.为了克服上述现有技术的缺陷,申请人进行了研究,并在研究中发现仿真图像和真实图像的低频傅里叶系数差异很小,利用仿真图像的低频傅里叶系数作为特征训练的网络,对于真实图像同样保持极高的精度,由此,本发明提出一种相位差波前检测的求解方法,能够快速准确求解光学波前相位,具有求解精度高、处理速度快、方法鲁棒性好、实用性强的优点。
6.所述方法包括:
7.通过成像系统采集若干幅具有相位差异的目标图像;
8.通过所述目标图像及神经网络,获取成像波前相位的估计值;
9.基于所述估计值,利用非线性算法求解得到所述成像波前相位。
10.具体地,所述“通过所述目标图像及神经网络,获取成像波前相位的估计值”包括:
11.计算所述目标图像的二维傅里叶变换,获得每幅所述目标图像的低频傅里叶系数;
12.将所述目标图像的全部低频傅里叶系数组合成为一个输入向量,将所述输入向量作为所述神经网络的输入,得到所述神经网络输出的所述成像波前相位的估计值。
13.进一步地,所述神经网络是通过以下方式训练得到的:
14.生成一系列随机波前相位;
15.根据所述成像系统的参数和傅里叶光学成像理论,对每个所述随机波前相位进行仿真,获得若干幅具有相位差异的仿真目标图像;
16.计算所述仿真目标图像的二维傅里叶变换,获得每幅所述仿真目标图像的低频傅里叶系数;
17.将每个所述随机波前相位对应的各幅所述仿真目标图像的全部低频傅里叶系数组成一个输入向量,每个所述随机波前相位的zernike系数组成一个输出向量;
18.将所有所述输入向量组成输入数据集,所有所述输出向量组成输出数据集;
19.利用所述输入数据集和所述输出数据集,训练所述神经网络。
20.具体地,所述“基于所述估计值,利用非线性算法求解得到所述成像波前相位”包括:
21.根据采集的所述目标图像以及所述成像系统的参数,构建目标评价函数;
22.将所述估计值作为初始搜索点,采用所述非线性算法使得所述目标评价函数取得最小值,求解得到所述成像波前相位。
23.优选地,所述非线性优化算法包括limited-memory broyden
–
fletcher
–
goldfarb
–
shanno算法。
24.本发明还提出了一种相位差波前检测求解系统,用于实现如前文所述的相位差波前检测求解方法,所述系统包括:
25.采集模块,用于通过成像系统采集若干幅具有相位差异的目标图像;
26.估计值获取模块,用于通过所述目标图像及神经网络,获取成像波前相位的估计值;
27.求解模块,用于利用非线性算法求解所述成像波前相位。
28.具体地,所述估计值获取模块包括:
29.计算单元,用于计算所述目标图像的二维傅里叶变换;
30.获取单元,用于获得每幅所述目标图像的低频傅里叶系数;
31.组合单元,用于将所述目标图像的全部低频傅里叶系数组合成为一个输入向量;
32.输出单元,用于将所述输入向量作为所述神经网络的输入,使所述神经网络输出所述成像波前相位的估计值。
33.具体地,所述求解模块包括:
34.构建单元,用于根据采集的所述目标图像以及所述成像系统的参数,构建目标评价函数;
35.求解单元,用于将所述估计值作为初始搜索点,采用所述非线性优化算法使得所述目标评价函数取得最小值,求解得到所述成像波前相位。
36.具体地,所述神经网络通过以下模块训练得到:
37.生成模块,用于生成一系列随机波前相位;
38.图像获取模块,用于根据所述成像系统的参数和傅里叶光学成像理论,对每个所述随机波前相位进行仿真,获得若干幅具有相位差异的仿真目标图像;
39.系数获取模块,用于计算所述仿真目标图像的二维傅里叶变换,获得每幅所述仿真目标图像的低频傅里叶系数;
40.向量组成模块,用于将每个所述随机波前相位对应的各幅所述仿真目标图像的全部低频傅里叶系数组成一个输入向量,每个所述随机波前相位的zernike系数组成一个输出向量;
41.数据集组成模块,用于将所有所述输入向量组成输入数据集,所有所述输出向量组成输出数据集;
42.训练模块,用于利用所述输入数据集和所述输出数据集,训练所述神经网络。
43.优选地,所述求解模块使用的所述非线性算法包括limited-memory broyden
–
fletcher
–
goldfarb
–
shanno算法。
44.本发明至少具有以下有益效果:
45.本方法通过神经网络直接获得待测波前的较好估计值,将该估计值作为非线性优化的初始搜索点。与传统的随机搜索初始点相比,估计值位于真实解附近,一方面能够有效避免非线性优化陷入局部极值或者鞍点,保证收敛到真实解,提高求解精度,另一方面,从真实解附近开始搜索,大大加速收敛过程,提高求解速度;
46.进一步地,本方法对大量不同的随机波前相位,该方法都能取得令人满意的结果,从统计上证明了方法具有很好的鲁棒性;利用仿真图像的低频傅里叶系数作为特征训练的网络,对于真实图像同样保持极高的精度。此外本方法还采用了计算机仿真图像训练网络,而不需要获取大量真实图像,实际可行性强。
47.以此,本发明提供了一种相位差波前检测的求解方法及系统,本发明提出的方法能够快速准确求解光学波前相位,具有求解精度高、处理速度快、方法鲁棒性好、实用性强的优点,不需要经过耗费大量时间的迭代运算,就能直接给出成像波前相位的较好估计值,通过仿真图像训练神经网络,训练的网络对真实图像同样保持高精度,避免了采集海量真实图像作为训练数据的苛刻要求,具有很好的应用可行性。
附图说明
48.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
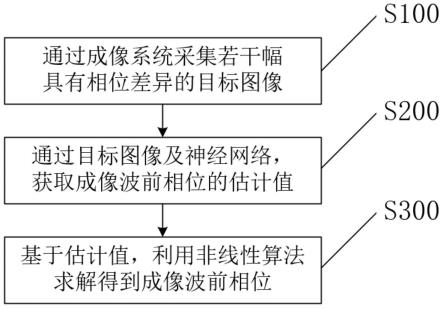
49.图1为实施例1提供的相位差波前检测求解方法的整体流程示意图;
50.图2为获取成像波前相位的估计值的流程示意图;
51.图3为神经网络训练方法的流程示意图;
52.图4为利用非线性算法求解成像波前相位的流程示意图;
53.图5为实施例2提供的相位差波前检测求解系统的整体模块结构示意图;
54.图6为相位差波前检测求解系统的部分模块结构示意图;
55.图7为训练所述神经网络的系统的模块结构示意图;
56.图8为实验使用的成像系统的光路结构示意图;
57.图9(a)~(f)为相位图和对应采集图像的示意图;
58.图10(a)~(b)为神经网络训练结果的数据图,其中图10(a)为回归r2的数据图,图10(b)为均方根误差的数据图;
59.图11为求解波前相位残余误差的直方图。
60.附图标记:
61.1-采集模块;2-估计值获取模块;3-求解模块;4-生成模块;5-图像获取模块;6-系
数获取模块;7-向量组成模块;8-数据集组成模块;9-训练模块;21-计算单元;22-获取单元;23-组合单元;24-输出单元;31-构建单元;32-求解单元;40-激光器;41-滤光片;42-偏振器;43-反射镜;44-物镜;45-针孔;46-分束器;47-空间光调制器;48-透镜;49-相机。
具体实施方式
62.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
63.实施例1
64.本发明提供一种相位差波前检测求解方法,结合低频傅里叶系数和bp神经网络,能够快速准确求解光学波前相位,具有求解精度高、处理速度快、方法鲁棒性好、实用性强的优点。
65.本方法通过神经网络直接获得待测波前的较好估计值,将该估计值作为非线性优化的初始搜索点。与传统的随机搜索初始点相比,估计值位于真实解附近,一方面能够有效避免非线性优化陷入局部极值或者鞍点,保证收敛到真实解,提高求解精度,另一方面,从真实解附近开始搜索,大大加速收敛过程,提高求解速度。
66.实验结果表明,对大量不同的随机波前相位,该方法都能取得令人满意的结果。从统计上证明了方法具有很好的鲁棒性。
67.近年来,将神经网络特别是深度学习引入到波前相位探测的研究层出不穷。但是,从实际应用角度考虑,神经网络需要获取大量训练样本,这对于多数应用都是很难实现的。申请人研究中发现,仿真图像和真实图像的低频傅里叶系数差异很小,利用仿真图像的低频傅里叶系数作为特征训练的网络,对于真实图像同样保持极高的精度。所以,本方法采用计算机仿真图像训练网络,而不需要获取大量真实图像,实际可行性强。
68.请参考图1,所述方法包括:
69.s100:通过成像系统采集若干幅具有相位差异的目标图像,进入步骤s200。
70.需要说明的是,本实施例中,相位差异是由每幅所述目标图像的成像通道引入不同的附加相位差得到的。
71.s200:通过目标图像及神经网络,获取成像波前相位的估计值,进入步骤s300。
72.s300:基于估计值,利用非线性算法求解得到成像波前相位。
73.需要说明的是,目标图像的成像通道具有成像波前相位,波前相位可以用一系列正交多项式的线性组合表示。zernike多项式在圆域内彼此正交,具有简单的不变性特性,被广泛应用于波前相位分析。zernike多项式线性组合的系数就是zernike系数。一般地,采用有限项zernike多项式对波前相位进行拟合,例如1~15项,拟合系数组成一组zernike系数{z1,z2,
…
,z
15
}。
74.同样需要说明的是,低频傅里叶系数是指频率较低的二维傅里叶频谱系数。对图像做二维傅里叶变换,得到二维傅里叶频谱。零频傅里叶频谱代表图像的平均灰度;靠近零频的傅里叶频谱为低频频谱,代表了图像的基本轮廓信息;远离零频的傅里叶频谱为高频频谱,代表了图像的细节信息。傅里叶频谱为复数,包括实部和虚部,低频频谱的实部和虚
部系数即为低频傅里叶系数。
75.具体地,请参考图2,步骤s200包括:
76.s210:计算目标图像in的二维傅里叶变换,获得每幅目标图像的低频傅里叶系数{f}n,其中n=1,2,
…
,n,进入步骤s220。
77.s220:将目标图像的全部低频傅里叶系数{f}n组合成为一个输入向量in,将输入向量in作为神经网络的输入,使神经网络输出成像波前相位的估计值,其中n=1,2,
…
,n。
78.具体地,将输入向量in输入到神经网络bpnn中,神经网络bpnn输出波前相位zernike系数的估计值
79.具体地,请参考图3,所述神经网络的训练方法包括:
80.a、生成一系列随机波前相位,进入步骤b。
81.本实施例中,通过计算机随机生成m组zernike系数{zs}m,其中m=1,2,
…
,m。
82.b、根据成像系统的参数和傅里叶光学成像理论,对每个随机波前相位进行仿真,获得若干幅具有相位差异的仿真目标图像,进入步骤c。
83.本实施例中,根据成像系统的参数和傅里叶光学成像理论,对每组zernike系数{zs}m进行仿真,生成n幅仿真目标图像其中n=1,2,
…
,n。
84.需要说明的是,生成随机波前相位和对随机波前相位进行仿真的操作由计算机执行,每幅仿真目标图像的成像通道引入的相位差θn与成像系统实际引入的相位差相同。
85.c、计算仿真目标图像的二维傅里叶变换,获得每幅仿真目标图像的低频傅里叶系数,进入步骤d。
86.本实施例中,对每幅仿真目标图像计算二维傅里叶变换,获得每幅仿真目标图像的低频傅里叶系数{fs}
mn
。
87.d、对每个随机波前相位对应的各幅仿真目标图像的全部低频傅里叶系数组成一个输入向量,每个随机波前相位的zernike系数组成一个输出向量,进入步骤e。
88.本实施例中,对每组zernike系数{zs}m对应的n幅仿真目标图像的全部低频傅里叶系数{fs}
mn
组成一个输入向量zernike系数{zs}m组成一个输出向量其中n=1,2,
…
,n。
89.需要说明的是,将低频傅里叶系数组合成输入向量,就是将低频傅里叶系数按特定顺序排列成列向量。示例性的,低频傅里叶频谱为1
×
2的矩阵,取其实部和虚部的系数,并重新排列成4
×
1的列向量。同理,将zernike系数按照特定顺序排列成列向量,作为输出向量。
[0090][0091]
e、将所有输入向量组成输入数据集,所有输出向量组成输出数据集,进入步骤f。
[0092]
本实施例中,将所有zernike系数[zs}m的输入向量组成一个输入数据集ins,所有输出向量组成一个输出数据集outs。
[0093]
f、利用输入数据集和输出数据集,训练bp神经网络。
[0094]
本实施例中,利用输入数据集ins和输出数据集outs,训练一个bp神经网络bpnn。
[0095]
需要说明的是,bp神经网络(back propagation neural network)是一种广泛应用的人工神经网络。具体而言,bp神经网络是由一个输入层、一个输出层和一个或多个隐藏层构成,采用bp算法训练的多层前馈神经网络,bp神经网络能够实现复杂的非线性映射,具有很强的非线性映射能力、自学习和自适应能力、泛化能力和容错能力。
[0096]
本实施例提出的方法中,bp神经网络的输入层节点数和输入向量匹配,输出层节点数和输出向量匹配。例如,输入向量in为p
×
1的矩阵,则输入层节点数也为p;输出向量out为q
×
1的矩阵,则输出层节点数也为q。
[0097]
值得注意的是,对于固定的光学成像系统和成像目标,成像模型和参数是基本不变的。因此,对于神经网络bpnn的训练步骤a~f是预先进行的,将训练得到的神经网络bpnn保存。在实际应用的场景中,将神经网络bpnn调出以进行应用,并直接执行步骤s210~s220。
[0098]
具体地,请参考图4,步骤s300包括:
[0099]
s310:根据采集的目标图像以及成像系统的参数,构建目标评价函数,进入步骤s320。
[0100]
本实施例中,根据成像系统采集的n幅目标图像in,以及成像通道引入的相位差θn,构建评估zernike系数的目标函数l,其中n=1,2,
…
,n。
[0101]
s320:将估计值作为初始搜索点,采用非线性优化算法使得目标评价函数取得最小值,求解得到成像波前相位。
[0102]
本实施例中,将zernike系数估计值作为初始搜索点,利用非线性优化算法搜索目标函数l的最小值l
min
,并得到l
min
对应的zernike系数{z}。利用zernike系数{z}重构得到成像波前相位
[0103]
一般而言,经常使用的非线性优化算法主要包括梯度下降法(gd)、共轭梯度法(cg)、牛顿法(newton)、拟牛顿法(quasi-newton)等,本实施例提出的方法采用了limited-memory broyden
–
fletcher
–
goldfarb
–
shanno(l-bfgs)算法,该算法是一种拟牛顿法,具有低内存要求、收敛速度快、稳定性好的优点。此外,limited-memory broyden
–
fletcher
–
goldfarb
–
shanno(l-bfgs)算法属于二阶梯度算法,精度往往比梯度下降法、共轭梯度法等一阶梯度算法高。
[0104]
本实施例提出的方法基于低频傅里叶系数的神经网络,不需要经过耗费大量时间的迭代运算,就能直接给出成像波前相位的较好估计值,该估计值位于真实解附近,将该估计值作为非线性优化算法的初始搜索点,一方面能够使搜索顺利收敛到真实解,避免出现陷入局部极值或鞍点的情况,提高求解精度,另一方面减少搜索时间,提高求解速度。更重要的是,实际应用中获取大量真实图像训练神经网络是极其困难的,而仿真图像和真实图像的低频傅里叶系数差别很小,所以本方法采用计算机仿真图像训练神经网络,训练的网络对真实图像同样保持高精度,避免了采集海量真实图像作为训练数据的苛刻要求,具有很好的应用可行性。该方法能够快速准确求解成像波前相位,而且对于大量不同的随机相位都能获得满意结果,方法鲁棒性好。
[0105]
实施例2
[0106]
本实施例提出了一种相位差波前检测求解系统,用于实现实施例1提出的相位差波前检测求解方法,请参考图5,所述系统包括:
[0107]
采集模块1,用于通过成像系统采集具有相位差异的若干幅目标图像;
[0108]
估计值获取模块2,用于通过目标图像及神经网络,获取成像波前相位的估计值;
[0109]
求解模块3,用于利用非线性算法求解成像波前相位。
[0110]
需要说明的是,目标图像的成像通道具有成像波前相位,波前相位可以用一系列正交多项式的线性组合表示。zernike多项式在圆域内彼此正交,具有简单的不变性特性,被广泛应用于波前相位分析。zernike多项式线性组合的系数就是zernike系数。一般地,采用有限项zernike多项式对波前相位进行拟合,例如1~15项,拟合系数组成一组zernike系数{z1,z2,
…
,z
15
}。
[0111]
具体地,请参考图6,估计值获取模块2包括:
[0112]
计算单元21,用于计算目标图像in的二维傅里叶变换;
[0113]
获取单元22,用于获得每幅目标图像的低频傅里叶系数{f}n,其中n=1,2,
…
,n;
[0114]
组合单元23,用于将目标图像的全部低频傅里叶系数{f}n组合成为一个输入向量in,其中n=1,2,
…
,n;
[0115]
输出单元24,用于将输入向量in作为神经网络的输入,使神经网络输出成像波前相位的估计值,
[0116]
具体地,组合单元23组合输入向量in,输出单元24将输入向量in输入到神经网络bpnn中,神经网络bpnn输出成像波前相位zernike系数的估计值
[0117]
本实施例提出的系统中,神经网络包括bp神经网络,bp神经网络的输入层节点数和输入向量匹配,输出层节点数和输出向量匹配。例如,输入向量in为p
×
1的矩阵,则输入层节点数也为p;输出向量out为q
×
1的矩阵,则输出层节点数也为q。
[0118]
值得注意的是,对于固定的光学成像系统和成像目标,成像模型和参数是基本不变的。因此,对于神经网络bpnn的训练步骤a~f是预先进行的,将训练得到的神经网络bpnn保存。在实际应用的场景中,将神经网络bpnn调出以进行应用,并直接使计算单元21、获取单元22、组合单元23及输出单元24运行应用。
[0119]
请再次参考图6,所述求解模块3包括:
[0120]
构建单元31,用于根据采集的目标图像以及成像系统的参数,构建目标评价函数;
[0121]
求解单元32,用于将估计值作为初始搜索点,采用非线性优化算法使得目标评价函数取得最小值,求解得到成像波前相位。
[0122]
本实施例中,构建单元31根据成像系统采集的n幅目标图像in,以及成像通道引入的相位差θn,构建评估zernike系数的目标函数l,其中n=1,2,
…
,n;求解单元32将zernike系数估计值作为初始搜索点,利用非线性优化算法搜索目标函数l的最小值l
min
,并得到l
min
对应的zernike系数{z}。利用zernike系数{z}重构得到成像波前相位
[0123]
具体地,请参考图7,所述神经网络通过以下模块训练得到:
[0124]
生成模块4,用于生成一系列随机波前相位;
[0125]
图像获取模块5,用于根据成像系统的参数和傅里叶光学成像理论,对每个随机波
前相位进行仿真,获得若干幅具有相位差异的仿真目标图像;
[0126]
系数获取模块6,用于计算仿真目标图像的二维傅里叶变换,获得每幅所述仿真目标图像的低频傅里叶系数;
[0127]
向量组成模块7,用于将每个随机波前相位对应的各幅仿真目标图像的全部低频傅里叶系数组成一个输入向量,每个随机波前相位的zernike系数组成一个输出向量;
[0128]
数据集组成模块8,用于将所有输入向量组成输入数据集,所有输出向量组成输出数据集;
[0129]
训练模块9,用于利用输入数据集和输出数据集,训练神经网络。
[0130]
本实施例中,生成模块4包括计算机随机生成m组zernike系数{zs}m,其中m=1,2,
…
,m;
[0131]
图像获取模块5根据成像系统的参数和傅里叶光学成像理论,对每组zernike系数{zs}m进行仿真,生成n幅仿真目标图像其中n=1,2,
…
,n;
[0132]
系数获取模块6对每幅仿真目标图像计算二维傅里叶变换,获得每幅仿真目标图像的低频傅里叶系数{fs}
mn
;
[0133]
向量组成模块7对每组zernike系数{zs}m对应的n幅仿真目标图像的全部低频傅里叶系数{fs}
mn
组成一个输入向量zernike系数{zs}m组成一个输出向量其中n=1,2,
…
,n;
[0134]
数据集组成模块8将所有zernike系数{zs}m的输入向量组成一个输入数据集ins,所有输出向量组成一个输出数据集outs;
[0135]
训练模块9利用输入数据集ins和输出数据集outs,训练一个bp神经网络bpnn。
[0136]
需要说明的是,将低频傅里叶系数组合成输入向量,就是将低频傅里叶系数按特定顺序排列成列向量。示例性的,低频傅里叶频谱为1
×
2的矩阵,取其实部和虚部的系数,并重新排列成4
×
1的列向量。同理,将zernike系数按照特定顺序排列成列向量,作为输出向量。
[0137][0138]
值得注意的是,对于固定的光学成像系统和成像目标,成像模型和参数是基本不变的。因此,对于神经网络bpnn的训练是预先在训练神经网络的系统进行的,将训练得到的神经网络bpnn保存。在实际应用的场景中,将神经网络bpnn调出,并直接在估计值获取模块2中进行应用。
[0139]
本实施例中,求解模块3中使用的非线性算法包括limited-memory broyden
–
fletcher
–
goldfarb
–
shanno(l-bfgs)算法,该算法是一种拟牛顿法,具有低内存要求、收敛速度快、稳定性好的优点。
[0140]
本发明提出的方法通过一个成像系统进行了实验,证明了方法的可行性。实验使用的成像系统的光路结构如图8所示,激光器40出射激光,中性密度滤光片41用于调节光
强,通过偏振器42调节偏振方向,并经反射镜43反射后,进入物镜44被会聚到针孔45处,针孔45出射光波通过透镜48后被准直为平行光,平行光通过分束器46后照射到纯相位型空间光调制器47(phase-only slm)上,空间光调制器47对光束相位进行调制,调制光束通过分束器46反射后,被透镜48会聚到相机49的探测靶面上,相机49用于采集光斑图像。
[0141]
将不同灰度分布的相位图加载到空间光调制器47上,从而产生不同的光波前相位。将相位图叠加离焦相位,即可产生离焦相位差。本实验中,随机生成了500组不同zernike系数并重构相位图,对每个相位叠加正离焦、不离焦、负离焦3种相位差,共采集了500组图像,每组图像包括3张不同离焦的光斑图像,即总共采集了1500张图像。
[0142]
请参考图9(a)~(f),图9(a)~(f)为一组相位图和对应采集图像的示例,其中图9(a)、图9(b)、图9(c)分别为正离焦、不离焦、负离焦相位图,图9(d)、图9(e)、图9(f)分别是图9(a)、图9(b)、图9(c)对应的采集光斑图像。
[0143]
利用计算机随机生成1000组zernike系数,根据实验系统参数和傅里叶光学成像理论,通过计算机仿真生成1000组图像,与实验采集图像类似,每组图像包括3张不同离焦的光斑图像,一共生成3000张仿真图像。对每张仿真图像进行二维傅里叶变换,提取低频傅里叶系数。每组图像的傅里叶系数组合成输入向量,对应的zernike系数组合成输出向量。所有输入向量组成输入数据集,所有输出向量组成输出数据集。利用输入数据集和输出数据集,进行bp神经网络训练,训练结果如图10(a)、图10(b)所示。
[0144]
对实验采集的每组图像进行二维傅里叶变换,提取低频傅里叶系数,组合成输入向量;将该输入向量输入到训练网络,训练网络输出波前相位的估计值;将该估计值作为l-bfgs非线性算法的初始搜索点,l-bfgs算法求解得到zernike系数,并重构波前相位;对500组波前相位,求解波前相位的残余误差均方根的最小值、最大值和平均值分别为0.029λ、0.045λ、0.037λ。求解出的波前相位残余误差的直方图如图11所示。
[0145]
综上所述,本发明提供了一种相位差波前检测的求解方法及系统,本发明提出的方法能够快速准确求解光学波前相位,具有求解精度高、处理速度快、方法鲁棒性好、实用性强的优点,不需要经过耗费大量时间的迭代运算,就能直接给出成像波前相位的较好估计值,通过仿真图像训练神经网络,训练的网络对真实图像同样保持高精度,避免了采集海量真实图像作为训练数据的苛刻要求,具有很好的应用可行性。
[0146]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1