一种工业机器人电路的陶瓷熔断器通断检测装置
1.本发明涉及熔断器通断检测技术领域,具体是一种工业机器人电路的陶瓷熔断器通断检测装置。
背景技术:
2.工业机器人能够在工业生产中代替人做一些单一、重复以及危险等作业,其往往以多关节机械手或多自由度的机器装置的形式存在,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,在工业机器人的电路中,陶瓷熔断器扮演着不可缺少的角色,通过陶瓷熔断器可以保护电流,其主要由熔体和熔管组成的,可以通过金属导体串联在电路中,当电流超过一定数值时,熔断器能产生热量,使熔体熔化,断开电流,达到保护效果,另外,由于陶瓷熔断器应用于工业机器人中,其形状常为筒形,而现有的检测装置,很难实现对于该类形状的陶瓷熔断器进行多位置检测,并且无法实现流水线作业。
3.因此,有必要提供一种工业机器人电路的陶瓷熔断器通断检测装置,以解决上述背景技术中提出的问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种工业机器人电路的陶瓷熔断器通断检测装置,用于对陶瓷熔断器进行通断检测,其包括第一传送带、检测组件、视觉检测器以及抬升组件,其中,所述第一传送带为分段式传送带,所述第一传送带沿x向延伸分布,位于所述第一传送带的上方依次设置有视觉检测器和检测组件,位于所述第一传送带的下方依次设置有对应于检测组件的抬升组件,
5.所述陶瓷熔断器包括筒体,所述筒体中贯穿有熔断条,所述通气的两端套设有套筒,所述熔断条的两端呈弯折状且焊接至套筒上,所述筒体的中部还开设有通孔,所述陶瓷熔断器由定位组件进行支撑和定位,所述定位组件能够放置于所述第一传送带上;
6.所述检测组件包括横向调整器、竖向调整器以及通断检测组件,其中,所述横向调整器的输出端固定有竖向调整器,所述竖向调整器的输出端固定有通断检测组件,所述通断检测组件能够对套筒进行通断检测、能够对筒体外部以及内部的熔断条进行通断检测。
7.进一步,作为优选,所述第一传送带的一侧还平行设置有第二传送带,所述第二传送带与第一传送带的结构相同,位于第一传送带和第二传送带的端部一侧还设置有移动传送带,所述移动传送带能够接收来自于第一传送带上的料体并送至第二传送带上,所述第二传送带的传送方向与所述第一传送带的传送方向相反。
8.进一步,作为优选,位于所述第一传送带的下方还设置有对应于最右侧检测组件的第三传送带,所述第三传送带与第一传送带的结构相同,所述第三传送带沿y向延伸分布;
9.所述抬升组件包括承载板、转座以及伸缩杆,其中,所述承载板转动设置于所述转
座上且具有动力,所述转座固定于所述伸缩杆上,所述伸缩杆为竖向布设,所述承载板用于承载定位组件,初始状态下,所述承载定位组件放置于所述第一传送带上,所述承载定位组件沿y向的跨度大于沿x向的跨度,所述第一传送带沿y向的跨度与第三传送带沿x向的跨度相同。
10.进一步,作为优选,所述定位组件包括定位板和定位座,其中,所述定位座可拆卸的固定于所述定位板上,所述定位座具有一凹槽,凹槽内底部转动设置有定位辊,凹槽内两侧采用弹簧连接有锁紧块。
11.进一步,作为优选,所述第一传送带包括对称设置的传送带座,所述传送带座上对称转动设置有转轮,两个对应的转轮之间传动连接有带体,两个带体共同支撑所述定位组件。
12.进一步,作为优选,所述移动传送带包括转移带座、滑轨以及定位板,其中所述滑轨沿y向延伸分布,所述滑轨上可移动的设置有滑块,所述滑块上对称固定有转移带座,所述转移带座上对称转动设置有带轮,两个对应的带轮之间传动连接有转移带。
13.进一步,作为优选,所述通断检测组件包括安装座、微型丝杠、定位杆、偏转杆以及检测头,其中,所述安装座内对称设置有两个微型丝杠,所述微型丝杠的输出端固定有定位杆,所述定位杆的另一端转动设置有具有动力的偏转杆,所述偏转杆的另一端设置有检测头,所述检测头连接至第一检测电路中。
14.进一步,作为优选,所述安装座内还对称固定有两个弹性电极头,所述弹性电极头连接至第二检测电路中。
15.与现有技术相比,本发明提供了一种工业机器人电路的陶瓷熔断器通断检测装置,具备以下有益效果:
16.本发明实施例中,通过设置第一传送带、第二传送带以及移动传送带可以使得上料和下料可以在同一方向,在节省空间的基础上,提升了整体的工作效率;另外,通过配置第三传送带可以进一步优化陶瓷熔断器的传送路线;
17.本发明实施例中,可以先对套筒进行检测,此时如果连通正常的话,则无需进行下一步检测,而当连通出现问题时,则对位于筒体外侧的熔断条进行检测,如果连通正常的话,则表明熔断条与套筒之间的焊接出现问题,如果连通出现问题时,则表明熔断条自身出现问题,此时可检测位于筒体内侧的熔断条,进一步确实熔断条的断裂位置,并且,配置有多个检测组件,每个检测组件可以负责检测陶瓷熔断器的不同位置,提高了检测效率。
附图说明
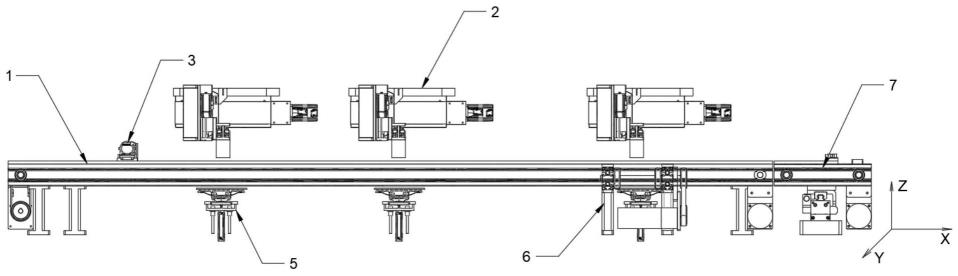
18.图1为一种工业机器人电路的陶瓷熔断器通断检测装置的结构示意图;
19.图2为一种工业机器人电路的陶瓷熔断器通断检测装置中检测组件的结构示意图;
20.图3为一种工业机器人电路的陶瓷熔断器通断检测装置中定位组件和陶瓷熔断器的结构示意图;
21.图4为一种工业机器人电路的陶瓷熔断器通断检测装置中通断检测组件的结构示意图;
22.图5为一种工业机器人电路的陶瓷熔断器通断检测装置中第一传送带、第二传送
带、移动传送带的结构示意图;
23.图6为一种工业机器人电路的陶瓷熔断器通断检测装置中移动传送带的结构示意图;
24.图7为一种工业机器人电路的陶瓷熔断器通断检测装置中视觉检测器的结构示意图;
25.图8为一种工业机器人电路的陶瓷熔断器通断检测装置中抬升组件的结构示意图;
26.图中:1、第一传送带;2、检测组件;3、视觉检测器;4、第二传送带;5、抬升组件;6、第三传送带;7、移动传送带;8、定位组件;9、陶瓷熔断器;21、横向调整器;22、竖向调整器;23、通断检测组件;81、定位板;82、定位座;83、定位辊;84、锁紧块;91、筒体;92、通孔;93、套筒;94、熔断条;231、安装座;232、弹性电极头;233、微型丝杠;234、定位杆;235、偏转杆;236、检测头;11、传送带座;12、转轮;71、转移带座;72、带轮;73、滑块;74、滑轨;75、定位板;51、承载板;52、转座;53、伸缩杆。
具体实施方式
27.实施例:请参阅图1~8,本发明实施例中,一种工业机器人电路的陶瓷熔断器通断检测装置,用于对陶瓷熔断器9进行通断检测,其包括第一传送带1、检测组件2、视觉检测器3以及抬升组件5,其中,所述第一传送带1为分段式传送带,所述第一传送带1沿x向延伸分布,位于所述第一传送带1的上方依次设置有视觉检测器3和检测组件2,位于所述第一传送带1的下方依次设置有对应于检测组件2的抬升组件5;
28.所述第一传送带1的一侧还平行设置有第二传送带4,所述第二传送带4与第一传送带1的结构相同,位于第一传送带1和第二传送带4的端部一侧还设置有移动传送带7,所述移动传送带7能够接收来自于第一传送带1上的料体并送至第二传送带4上,所述第二传送带4的传送方向与所述第一传送带1的传送方向相反。
29.如此使得,上料和下料可以在同一方向,在节省空间的基础上,提升了整体的工作效率;
30.进一步讲,由于陶瓷熔断器的特殊结构,在上料时,通过人工上料的方式最佳,也即,通过操作人员将陶瓷熔断器嵌入定位组件8中,再将定位组件8放置于第一传送带1上即可,之后还可同步回收第二传送带4上的定位组件8以及定位组件8上的陶瓷熔断器,因此,在效率和空间利用上均得到了提升;
31.另外,位于所述第一传送带1的下方还设置有对应于最右侧检测组件2的第三传送带6,所述第三传送带6与第一传送带1的结构相同,所述第三传送带6沿y向延伸分布;
32.另外,通过配置第三传送带6可以进一步优化陶瓷熔断器的传送路线,也即,通过配置第三传送带6可以接收检测不合格的陶瓷熔断器;其中,所述抬升组件5包括承载板51、转座52以及伸缩杆53,其中,所述承载板51转动设置于所述转座52上且具有动力,所述转座52固定于所述伸缩杆53上,所述伸缩杆53为竖向布设,所述承载板51用于承载定位组件8,初始状态下,所述承载定位组件8放置于所述第一传送带1上,所述承载定位组件8沿y向的跨度大于沿x向的跨度,所述第一传送带1沿y向的跨度与第三传送带6沿x向的跨度相同,
33.如此使得,在检测到陶瓷熔断器不合格时,利用伸缩杆53向上抬升定位组件8并转
动90度,之后伸缩杆收缩,使得定位组件位于第三传送带6上即可实现转移。
34.本实施例中,如图3,所述陶瓷熔断器9包括筒体91,所述筒体91中贯穿有熔断条94,所述通气91的两端套设有套筒93,所述熔断条94的两端呈弯折状且焊接至套筒93上,所述筒体91的中部还开设有通孔92,所述陶瓷熔断器9由定位组件8进行支撑和定位,所述定位组件8能够放置于所述第一传送带1上,当然,陶瓷熔断器9还包括如塞体等其他结构,在此不再赘述,
35.其中需要注意的是,本实施例中,陶瓷熔断器9的筒体91上开设有通孔92,利用通过92可以实现对于筒体91内部的熔断条94的检测。
36.所述检测组件2包括横向调整器21、竖向调整器22以及通断检测组件23,其中,所述横向调整器21的输出端固定有竖向调整器22,所述竖向调整器22的输出端固定有通断检测组件23,所述通断检测组件23能够对套筒93进行通断检测、能够对筒体91外部以及内部的熔断条94进行通断检测。
37.其中,横向调整器21和竖向调整器22均为丝杠螺母副结构,丝杠螺母副结构为现有结构,其包括丝杠、螺母,限位杆等,其中螺母作为其移动输出端。
38.本实施例中,如图3,所述定位组件8包括定位板81和定位座82,其中,所述定位座82可拆卸的固定于所述定位板81上,所述定位座82具有一凹槽,凹槽内底部转动设置有定位辊83,凹槽内两侧采用弹簧连接有锁紧块84。
39.其中,较佳的,锁紧块84的顶部可以配置为弧形,以便所述陶瓷熔断器的嵌入。
40.本实施例中,如图5,所述第一传送带1包括对称设置的传送带座11,所述传送带座11上对称转动设置有转轮12,两个对应的转轮12之间传动连接有带体,两个带体共同支撑所述定位组件8。
41.而第二传送带和第三传送带的结构均与第一传送带1的结构相同,因此,三者均为分段式传送带,这样,有利于抬升组件的上下抬升动作,也即,本实施例中,抬升组件是设置于分段式传送带的间隙之间的。
42.本实施例中,如图6,所述移动传送带7包括转移带座71、滑轨74以及定位板75,其中所述滑轨74沿y向延伸分布,所述滑轨74上可移动的设置有滑块73,所述滑块73上对称固定有转移带座71,所述转移带座71上对称转动设置有带轮72,两个对应的带轮72之间传动连接有转移带,其中,滑块的滑动动作可以由气缸所驱动,气缸的驱动动作快,并且可以使得滑块在两个位置上进行快速转换,保证了滑块的移动效率。
43.本实施例中,如图4,所述通断检测组件23包括安装座231、微型丝杠233、定位杆234、偏转杆235以及检测头236,其中,所述安装座231内对称设置有两个微型丝杠233,所述微型丝杠233的输出端固定有定位杆234,所述定位杆234的另一端转动设置有具有动力的偏转杆235,所述偏转杆235的另一端设置有检测头236,所述检测头236连接至第一检测电路中。
44.所述安装座231内还对称固定有两个弹性电极头233,所述弹性电极头233连接至第二检测电路中。
45.需要解释的是,本实施例中,配置有多个检测组件2,每个检测组件2可以负责检测陶瓷熔断器8的不同位置,
46.其中,可以先对套筒93进行检测,此时如果连通正常的话,则无需进行下一步检
测,而当连通出现问题时,则对位于筒体91外侧的熔断条94进行检测,如果连通正常的话,则表明熔断条与套筒93之间的焊接出现问题,如果连通出现问题时,则表明熔断条自身出现问题,此时可检测位于筒体91内侧的熔断条,进一步确实熔断条的断裂位置。
47.还需解释的是,第一检测电路和第二电测电路均包括电源、电阻、检测灯、开关以及电线,利用电线将电源、电阻、检测灯、开关进行串联,并且电线上具有断口,第一检测电路的断口处连接检测头,第二检测电路的断口处连接弹性电极头;
48.在对套筒93进行检测时,通过微型丝杠233将定位杆234驱动至靠近套筒位置处,此时偏转杆235可保持竖直状态,同时抬升组件将定位组件向上抬升,从而使得套筒与检测头相接触,使得陶瓷熔断器9串联至第一检测电路中,实现检测;
49.在对位于筒体91内侧的熔断条进行检测时,通过微型丝杠将定位杆234驱动至靠近通孔位置处,同时抬升组件将定位组件向上抬升,之后,偏转杆进行角度调整,与此同时继续调节陶瓷熔断器的高度,使得位于筒体91内侧的熔断条与检测头相接触,使得陶瓷熔断器9串联至第一检测电路中,实现检测;
50.而对位于筒体91外侧的熔断条94进行检测时,则可以直接利用抬升组件将定位组件向上抬升,使得熔断条与弹性电极头232相接触,使得陶瓷熔断器9串联至第二检测电路中,实现检测。
51.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1