放线绕道桩号确定方法和系统、可读存储介质与流程
本发明涉及地震勘探,具体而言,涉及一种放线绕道桩号确定方法和系统、可读存储介质。
背景技术:
1、随着碳中和、碳达峰目标的提出,天然气、轻质油作为化石能源的中的清洁能源,消费总量攀升。为了发现更多的天然气、轻质油资源,降低对外依存度,保障能源安全,我国逐步加大了天然气、轻质油勘探的力度。英雄岭是柴达木盆地的主力产区,发现了多个含气、含轻质油构造。“高原山地、干燥疏松、表层各向异性、复杂构造”四大特点单独存在时,都是很大的地震勘探难题,英雄岭地区四种地震不利因素的叠合,导致该区地震技术和工程实施均是极大挑战,因此,英雄岭地区一度被称为“地震勘探的禁区”。英雄岭地区自上世纪九十年代开始曾经组织了五轮次地震攻关,限于当时的物探装备能力,攻关成效甚微,“五上五下”。通过2011年英东三维地震勘探的实施,“六上”英雄岭,一举攻克了勘探禁区的世界级难题。自2011年起,环英雄岭勘探拉开了序幕,但由于该区沟壑纵横,资源配备、到位难度极大,导致勘探成本居高不下,其核心问题就是有线仪器大线长度是固定的55m,而受地形起伏影响,两个检波点之间的坡面长度是不固定的,导致该区无法合理进行资源配置,只能采用资源高配置,人员少分配工作量的方式,保证项目平稳运作。
2、因此,如何提出一种能够根据两个检波点之间的坡面长度对复杂山地施工中的资源进行合理配置的方案成为目前亟待解决的问题。
技术实现思路
1、为解决上述技术问题,本发明的第一方面提出了一种放线绕道桩号确定方法。
2、本发明的第二方面还提出了一种放线绕道桩号确定系统。
3、本发明的第三方面还提出了一种放线绕道桩号确定系统。
4、本发明的第四方面还提出了一种可读存储介质。
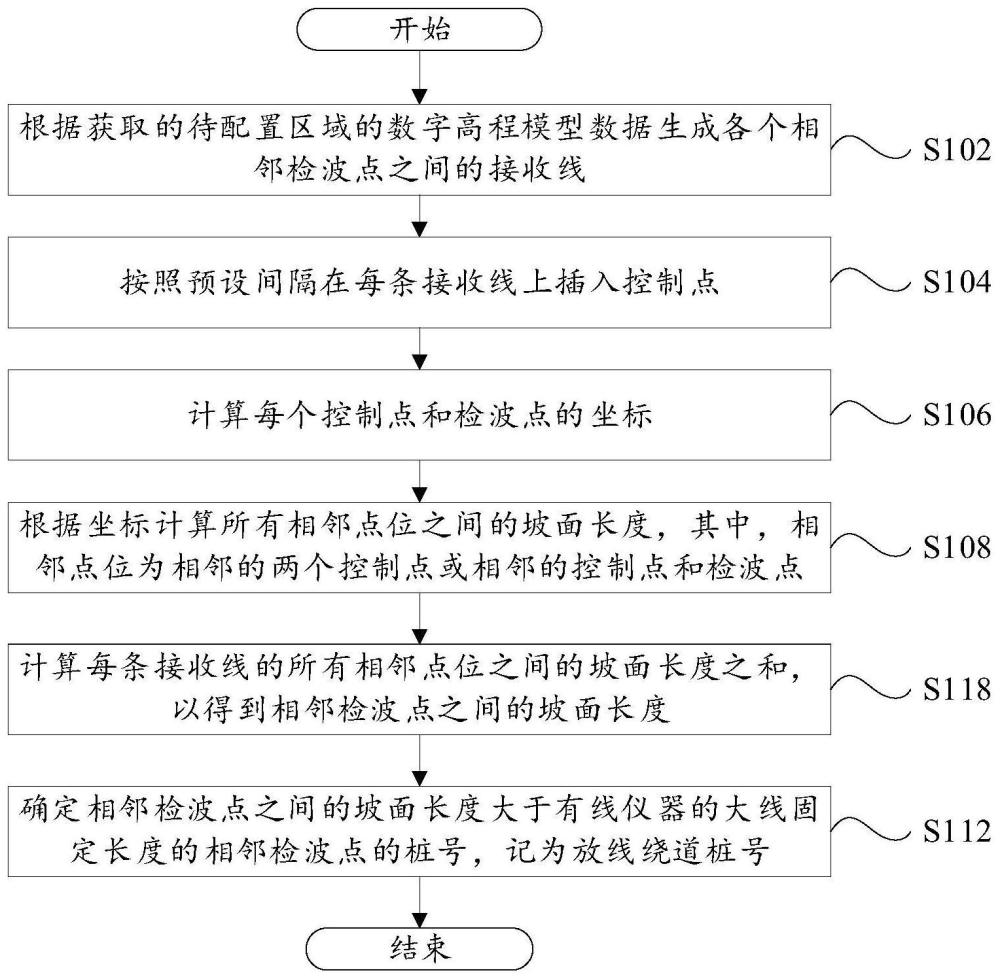
5、有鉴于此,本发明第一方面提出了一种放线绕道桩号确定方法,用于山地地震勘探,包括:根据获取的待配置区域的数字高程模型数据生成各个相邻检波点之间的接收线;按照预设间隔在每条接收线上插入控制点;计算每个控制点和检波点的坐标;根据坐标计算所有相邻点位之间的坡面长度,其中,相邻点位为相邻的两个控制点或相邻的控制点和检波点;计算每条接收线的所有相邻点位之间的坡面长度之和,以得到相邻检波点之间的坡面长度;确定相邻检波点之间的坡面长度大于有线仪器的大线固定长度的相邻检波点的桩号,记为放线绕道桩号。
6、根据本发明提供的放线绕道桩号确定方法,通过对待进行有限仪器配置的待配置区域的数字高程模型数据进行获取,而后通过对该数据进行整理计算以生成各个相邻检波点之间的接收线。而后在接收线上按照预设间隔插入控制点,已使得两个检波点之间的接收线被控制点分割为若干部分。而后计算出每个检波点和控制点的坐标,以便于根据坐标信息相邻点位,即相邻的两个控制点或相邻的控制点和检波点之间的坡面长度。在计算出每个相邻点位之间的坡面长度之后,通过求和得到两个相邻的检波点之间坡面长度,进而就能够根据相邻检波点之间的坡面长度对放线绕道桩号进行确定,具体的,有线仪器的最大固定长度一般为55m,对相邻检波点之间的坡面长度大于55m的检波点桩号进行确定,以作为方向绕道桩号,以此完成了放线绕道桩号的确定。本技术通过在相邻检波点之间插入控制点,利用累加求和的方式计算出两个检波点之间的坡面长度,对放线绕道桩号进行了确定,以便于后续根据放线绕道桩号精准配备野外作业地震采集设备,为复杂山地作业项目打下了坚实的基础。
7、具体而言,现有技术中在复杂山地有线仪器采集时,由于有线设备设计的检波器连接口是固定的(一般为4个),而且两个检波器连接口最大距离为55m,当相邻两个检波点之间的坡面长度大于55m,就需要跨过此连接口,在地震仪器主机上将此连接口设置为放线绕道,设置后此连接口不采集地震数据,两侧的桩号称为放线绕道桩号;一般地震采集时,放线小组是根据每天放置的检波器申领有线设备的,例如一个人每天放置12个检波器,每个有线设备有4个连接口,他就需要申领3根有线设备,但在复杂山地施工中,受地形起伏影响,坡面长度会大于55m,每大于55m就要把一个连接口设置为放线绕道,因此,传统方法施工时,每个放线小组需要多配备10根左右的有线设备,由于不清楚放线绕道的具体位置,又需要放线人员徒步肩扛的方式运送设备,只能采用有线资源高配置,人员少分配工作量的方式,才能保证项目平稳运作,而在采用了本技术中的方法,可以在施工前就获取放线绕道的具体位置和坡面长度,从而更合理的配置资源和人员,减少闲置资源,放线可以一次到位,提高施工效率。
8、另外,本发明提供的上述技术方案中的放线绕道桩号确定方法还可以具有如下附加技术特征:
9、在上述技术方案中,根据获取的待配置区域的数字高程模型数据生成相邻检波点之间的接收线的步骤具体包括:将获取的待配置区域的数字高程模型数据按线号、桩号从小到大排序;按序将线号相同、桩号相邻检波点数据按照起始线号、起始桩号、起始坐标y、起始坐标x、终止线号、终止桩号、终止坐标y、终止坐标x排列作为检波点数据表格中的行数据,将每一行的终止线号、终止桩号、终止坐标y、终止坐标x作为下一行的起始线号、起始桩号、起始坐标y、起始坐标x,以此生成检波点数据表格;根据检波点数据表格中起始坐标y、起始坐标x和终止坐标y、终止坐标x生成接收线。
10、在该技术方案中,通过将待配置区域的数字高程模型数据按照线号和桩号从大到小进行排序,以便于后续按照顺序进行检波点数据表格的生成。而后按照从大到小的顺序对相同线号相邻桩号的检波点数据进行排列,具体的按照起始线号、起始桩号、起始坐标y、起始坐标x、终止线号、终止桩号、终止坐标y、终止坐标x的顺序作为行数据,其中,起始数据相较于终止数据的检波点桩号小,将每一行的终止线号、终止桩号、终止坐标y、终止坐标x作为下一行的起始线号、起始桩号、起始坐标y、起始坐标x,当同一行的行数据中线号不同时,该行数据删除,以此生成检波点数据表格,以此完成对检波点数据的整理,便于后续计算时提取数据,使得计算过程更加井然有序,提高了工作效率。
11、在上述技术方案中,计算每个控制点和检波点的坐标的步骤具体包括:根据数字高程模型计算每个控制点和检波点的三维坐标。
12、在该技术方案中,通过数字高程模型进行每个控制点和检波点的三维坐标的计算,由于数字高程模型(digital elevation model),简称dem,是通过有限的地形高程数据实现对地面地形的数字化模拟(即地形表面形态的数字化表达),它是用一组有序数值阵列形式表示地面高程的一种实体地面模型,是数字地形模型的一个分支,其它各种地形特征值均可由此派生,因此通过该模型进行控制点和检波点的三维坐标计算能够提高工作效率,自动完成控制点和检波点的三维坐标的计算,无需人工干预。
13、在上述技术方案中,根据坐标计算所有相邻点位之间的坡面长度的步骤具体包括:根据坐标计算相邻点位的高程差以及在xy轴平面上投影的距离;根据勾股定理计算相邻点位之间的坡面长度。
14、在该技术方案中,通过相邻点位的坐标,根据勾股定理就能够计算出相邻点位的高程差,以及在xy轴平面上投影的距离,进而再根据高程差和投影距离使用勾股定理计算出两个相邻点位之间的坡面长度,以此得到连接线上各个被控制点分隔开的线段的坡面长度,以便于对各个线段的坡面长度进行累计求和求的两个相邻检波点之间的坡面长度,进而根据坡面长度与有线仪器的大线固定长度的对比得到放线绕道桩号。
15、在上述技术方案中,计算相邻点位在xy轴平面上投影的距离的公式为:
16、计算相邻点位的高程差的公式为:dzn=n+1-n;其中,dxn为相邻点位在xy轴平面上投影的距离,dzn相邻点位的高程差,xn+1和xn分别为相邻点位的x轴坐标,yn+1和yn分别为相邻点位的y轴坐标,zn+1和zn分别为相邻点位的z轴坐标。
17、在该技术方案中,通过相邻点位的坐标,根据上述公式就能够计算出相邻点位的高程差,以及在xy轴平面上投影的距离,进而再根据高程差和投影距离使用勾股定理计算出两个相邻点位之间的坡面长度,以此得到连接线上各个被控制点分隔开的线段的坡面长度,以便于对各个线段的坡面长度进行累计求和求的两个相邻检波点之间的坡面长度,进而根据坡面长度与有线仪器的大线固定长度的对比得到放线绕道桩号。
18、在上述技术方案中,计算相邻点位之间的坡面长度的公式为:
19、其中,dpcn为相邻点位之间的坡面长度,dxn为相邻点位在xy轴平面上投影的距离,dzn相邻点位的高程差。
20、在该技术方案中,通过相邻点位的高程差,以及在xy轴平面上投影的距离,进而再根据高程差和投影距离使用勾股定理,根据上述公式计算出两个相邻点位之间的坡面长度,以此得到连接线上各个被控制点分隔开的线段的坡面长度,以便于对各个线段的坡面长度进行累计求和求的两个相邻检波点之间的坡面长度,进而根据坡面长度与有线仪器的大线固定长度的对比得到放线绕道桩号。
21、在上述技术方案中,在确定相邻检波点之间的坡面长度大于有线仪器的大线固定长度的相邻检波点的桩号,记为放线绕道桩号之前,还包括:对比相邻检波点之间的坡面长度与有线仪器的大线固定长度,以得到大于有线仪器的大线固定长度的相邻检波点之间的坡面长度。
22、在该技术方案中,通过对相邻检波点之间的坡面长度与有线仪器的大线固定长度进行对比,得到大于有线仪器的大线固定长度的相邻检波点之间的坡面长度,进而能够通过对大于有线仪器的大线固定长度的相邻检波点之间的坡面长度的相邻检波点的桩号进行确定,以确定出放线绕道桩号,以便于后续根据放线绕道桩号精准配备野外作业地震采集设备,为复杂山地作业项目打下了坚实的基础。
23、本发明的第二方面提供了一种放线绕道桩号确定系统,包括:生成模块,用于根据获取的待配置区域的数字高程模型数据生成各个相邻检波点之间的接收线;插入模块,用于按照预设间隔在每条接收线上插入控制点;计算模块,用于计算每个控制点和检波点的坐标,根据坐标计算所有相邻点位之间的坡面长度,其中,相邻点位为相邻的两个控制点或相邻的控制点和检波点,计算每条接收线的所有相邻点位之间的坡面长度之和,以得到相邻检波点之间的坡面长度;确定模块,用于确定相邻检波点之间的坡面长度大于有线仪器的大线固定长度的相邻检波点的桩号,记为放线绕道桩号。
24、根据本发明的技术方案提供的放线绕道桩号确定系统,包括生成模块、插入模块、计算模块和确定模块。其中,生成模块用于根据获取的待配置区域的数字高程模型数据生成各个相邻检波点之间的接收线;插入模块用于按照预设间隔在每条接收线上插入控制点;计算模块用于计算每个控制点和检波点的坐标,根据坐标计算所有相邻点位之间的坡面长度,其中,相邻点位为相邻的两个控制点或相邻的控制点和检波点,计算每条接收线的所有相邻点位之间的坡面长度之和,以得到相邻检波点之间的坡面长度;确定模块用于确定相邻检波点之间的坡面长度大于有线仪器的大线固定长度的相邻检波点的桩号,记为放线绕道桩号。同时,根据本发明的技术方案提供的放线绕道桩号确定系统,由于其用于实现本发明的第一方面提供的放线绕道桩号确定方法的步骤,因而该放线绕道桩号确定系统具备该放线绕道桩号确定方法的全部技术效果,在此不再赘述。
25、在上述技术方案中,生成模块具体用于:将获取的待配置区域的数字高程模型数据按线号、桩号从小到大排序;按序将线号相同、桩号相邻检波点数据按照起始线号、起始桩号、起始坐标y、起始坐标x、终止线号、终止桩号、终止坐标y、终止坐标x排列作为检波点数据表格中的行数据,将每一行的终止线号、终止桩号、终止坐标y、终止坐标x作为下一行的起始线号、起始桩号、起始坐标y、起始坐标x,以此生成检波点数据表格;根据检波点数据表格中起始坐标y、起始坐标x和终止坐标y、终止坐标x生成接收线。
26、在该技术方案中,通过将待配置区域的数字高程模型数据按照线号和桩号从大到小进行排序,以便于后续按照顺序进行检波点数据表格的生成。而后按照从大到小的顺序对相同线号相邻桩号的检波点数据进行排列,具体的按照起始线号、起始桩号、起始坐标y、起始坐标x、终止线号、终止桩号、终止坐标y、终止坐标x的顺序作为行数据,其中,起始数据相较于终止数据的检波点桩号小,将每一行的终止线号、终止桩号、终止坐标y、终止坐标x作为下一行的起始线号、起始桩号、起始坐标y、起始坐标x,当同一行的行数据中线号不同时,该行数据删除,以此生成检波点数据表格,以此完成对检波点数据的整理,便于后续计算时提取数据,使得计算过程更加井然有序,提高了工作效率。
27、在上述技术方案中,计算模块具体用于:根据数字高程模型计算每个控制点和检波点的三维坐标。
28、在该技术方案中,通过数字高程模型进行每个控制点和检波点的三维坐标的计算,由于数字高程模型(digital elevation model),简称dem,是通过有限的地形高程数据实现对地面地形的数字化模拟(即地形表面形态的数字化表达),它是用一组有序数值阵列形式表示地面高程的一种实体地面模型,是数字地形模型的一个分支,其它各种地形特征值均可由此派生,因此通过该模型进行控制点和检波点的三维坐标计算能够提高工作效率,自动完成控制点和检波点的三维坐标的计算,无需人工干预。
29、在上述技术方案中,计算模块还用于:根据坐标计算相邻点位的高程差以及在xy轴平面上投影的距离;根据勾股定理计算相邻点位之间的坡面长度。
30、在该技术方案中,通过相邻点位的坐标,根据勾股定理就能够计算出相邻点位的高程差,以及在xy轴平面上投影的距离,进而再根据高程差和投影距离使用勾股定理计算出两个相邻点位之间的坡面长度,以此得到连接线上各个被控制点分隔开的线段的坡面长度,以便于对各个线段的坡面长度进行累计求和求的两个相邻检波点之间的坡面长度,进而根据坡面长度与有线仪器的大线固定长度的对比得到放线绕道桩号。
31、在上述技术方案中,计算相邻点位在xy轴平面上投影的距离的公式为:
32、计算相邻点位的高程差的公式为:dzn=n+1-n;其中,dxn为相邻点位在xy轴平面上投影的距离,dzn相邻点位的高程差,xn+1和xn分别为相邻点位的x轴坐标,yn+1和yn分别为相邻点位的y轴坐标,zn+1和zn分别为相邻点位的z轴坐标。
33、在该技术方案中,通过相邻点位的坐标,根据上述公式就能够计算出相邻点位的高程差,以及在xy轴平面上投影的距离,进而再根据高程差和投影距离使用勾股定理计算出两个相邻点位之间的坡面长度,以此得到连接线上各个被控制点分隔开的线段的坡面长度,以便于对各个线段的坡面长度进行累计求和求的两个相邻检波点之间的坡面长度,进而根据坡面长度与有线仪器的大线固定长度的对比得到放线绕道桩号。
34、在上述技术方案中,计算相邻点位之间的坡面长度的公式为:
35、其中,dpcn为相邻点位之间的坡面长度,dxn为相邻点位在xy轴平面上投影的距离,dzn相邻点位的高程差。
36、在该技术方案中,通过相邻点位的高程差,以及在xy轴平面上投影的距离,进而再根据高程差和投影距离使用勾股定理,根据上述公式计算出两个相邻点位之间的坡面长度,以此得到连接线上各个被控制点分隔开的线段的坡面长度,以便于对各个线段的坡面长度进行累计求和求的两个相邻检波点之间的坡面长度,进而根据坡面长度与有线仪器的大线固定长度的对比得到放线绕道桩号。
37、在上述技术方案中,放线绕道桩号确定系统还包括:比较模块,用于对比相邻检波点之间的坡面长度与有线仪器的大线固定长度,以得到大于有线仪器的大线固定长度的相邻检波点之间的坡面长度。
38、在该技术方案中,通过对相邻检波点之间的坡面长度与有线仪器的大线固定长度进行对比,得到大于有线仪器的大线固定长度的相邻检波点之间的坡面长度,进而能够通过对大于有线仪器的大线固定长度的相邻检波点之间的坡面长度的相邻检波点的桩号进行确定,以确定出放线绕道桩号,以便于后续根据放线绕道桩号精准配备野外作业地震采集设备,为复杂山地作业项目打下了坚实的基础。
39、本发明的第三方面提供了一种放线绕道桩号确定系统,包括存储器和处理器,存储器存储可在处理器上运行的程序或指令,程序或指令被处理器执行时实现上述任一技术方案的放线绕道桩号确定方法的步骤。
40、根据本发明的技术方案提供的放线绕道桩号确定系统,包括存储器和处理器及存储在存储器上并可在处理器上运行的程序,程序被处理器执行时实现上述任一放线绕道桩号确定方法限定的步骤。同时,由于本技术的放线绕道桩号确定系统能够实现上述任一放线绕道桩号确定方法限定的步骤,因此本技术方案提供的放线绕道桩号确定系统具有上述任一技术方案中提供的放线绕道桩号确定方法的全部有益效果。
41、本发明的第四方面提供了一种可读存储介质,其上存储有程序和/或指令,程序和/或指令被处理器执行时实现上述任一技术方案中的放线绕道桩号确定方法的步骤。
42、根据本发明的技术方案提供的可读存储介质,由于其上存储的程序和/或指令被处理器执行时可实现上述任一技术方案中的放线绕道桩号确定方法的步骤,因而具有上述放线绕道桩号确定方法的全部有益技术效果,在此不再赘述。
43、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!