一种基于智能手机GNSS的运动距离和速度估计方法与流程
一种基于智能手机gnss的运动距离和速度估计方法
技术领域
1.本发明涉及卫星导航定位领域,特别是一种基于智能手机gnss的运动距离和速度估计方法。
背景技术:
2.运动距离和运动速度是日常生活中经常需要用到的两个量。智能手机一般均带有卫星导航定位芯片,可以接收北斗等全球卫星导航系统(gnss)的信号,实现实时的伪距单点定位。基于各个时刻的gnss单点定位结果,即各个时刻获取的三维坐标,可以计算各相邻时刻的运动距离,将所有相邻时刻的运动距离相加,即可得到总的运动距离,也可以根据运动距离和运动时间计算出运动速度。然而,在使用智能手机原始的gnss伪距观测值进行单点定位时,不仅要受到广播星历中的轨道和卫星钟误差的影响,还会受到大气电离层延迟和对流层延迟的影响。另外,由于智能手机中使用的gnss接收机是价格低廉的导航型接收机,其性能不如高精度的大地测量型接收机,智能手机抗信号多路径干扰能力弱,多路径效应影响显著,并且观测噪声也较大。以上影响因素综合起来导致基于智能手机gnss的伪距单点定位误差达几米至几十米,直接使用这种精度的定位结果计算运动距离和速度,将会产生较大的误差,难以满足日常使用需求。
技术实现要素:
3.本发明所要解决的技术问题是:针对现有技术的不足,提出一种基于智能手机gnss的运动距离和速度估计方法。
4.为解决以上技术问题,本发明提供如下技术方案:一种基于智能手机gnss的运动距离和速度估计方法,其特征在于,包括以下步骤:s1、基于智能手机采集gnss数据,获得其中的伪距观测值和星历数据;s2、基于星历数据中提供的卫星坐标和卫星钟误差,以及各卫星至智能手机的伪距观测值,建立关于智能手机三维坐标的观测方程;然后,基于智能手机预设的初始近似坐标,对各个观测方程进行线性化处理,获得关于智能手机三维坐标改正数的线性观测方程;s3、将步骤s2中各个线性化处理后的观测方程分别转化为误差方程形式,获得对应的误差方程组,并求解该误差方程组,获得智能手机三维坐标改正数,将智能手机三维坐标改正数加上智能手机的初始近似坐标,获得各时刻智能手机gnss单点定位坐标序列;s4、对智能手机gnss单点定位坐标序列进行移动平均滤波处理,获得处理后的三维空间直角坐标序列,再将其转化为平面和高程组成的坐标序列;s5、根据步骤s4获得的平面和高程组成的坐标序列,计算任意相邻两个时刻智能手机的运动距离,并获得智能手机运动的总距离、以及运动的平均速度。
5.进一步地,所述步骤s2包括如下子步骤:s2.1、按如下公式建立关于智能手机三维坐标的观测方程:
,其中, 为伪距观测值, 为智能手机三维坐标,为卫星坐标, 为光速,为智能手机上的gnss接收机的钟误差, 为卫星钟误差, 为对流层延迟,为电离层延迟,为测量噪声未模型化的误差;s2.2、对卫星钟误差、对流层延迟和电离层延迟进行模型改正,并忽略测量噪声未模型化误差后,基于智能手机的预设初始近似坐标,对各个观测方程进行线性化,得到关于智能手机三维坐标改正数的线性观测方程:,其中,为智能手机预设初始近似坐标,为智能手机三维坐标改正数,即初始近似坐标的改正数; 为按预设初始近似坐标计算的卫星至智能手机间的近似距离;s2.3、按如下公式获得卫星至智能手机间的近似距离:。
6.进一步地,所述步骤s3包括如下子步骤:s3.1、按如下公式将各个线性化处理后的观测方程分别转化为误差方程:,其中,;s3.2、对误差方程以最小二乘准则求解智能手机三维坐标改正数的值,即,s3.3、按如下公式计算各个时刻智能手机gnss单点定位坐标值:,
再获得智能手机gnss单点定位坐标序列为:,。
7.进一步地,所述步骤s4包括如下子步骤:s4.1、按如下公式对智能手机gnss单点定位坐标序列进行移动平均滤波处理:,其中,为移动平均滤波处理后的坐标值,,为移动平均坐标点的数目;为总的坐标点数目,对于前 个坐标点,即时,直接取未移动平均滤波处理的坐标;s4.2、将转换成大地经纬度坐标,其中,和分别为大地纬度和大地经度,为高程;s4.3、将大地经纬度坐标中的进行高斯克吕格投影,获得其对应的平面坐标,之后获得对应的平面和高程组成的三维坐标。
8.进一步地,所述步骤s5包括如下子步骤:s5.1、按如下公式计算任意相邻两个时刻智能手机的运动距离:,其中, 、分别为任意相邻两个时刻,;s5.2、按如下公式计算智能手机运动的总距离:;s5.3、按如下公式计算智能手机运动的平均速度:
,其中,为总的运动时长。
9.本发明采用以上技术方案,与现有技术相比的有益效果:本发明采用智能手机gnss原始观测值进行伪距单点定位,对单点定位的坐标序列进行移动平均滤波,降低坐标序列噪声水平,提高点位坐标精度,根据滤波后的坐标序列计算运动距离和运动的平均速度。实验测试表明,使用本发明方法计算的运动距离和平均速度的误差均不超过0.5%,满足跑步健身和体育训练等日常应用的精度需求。
附图说明
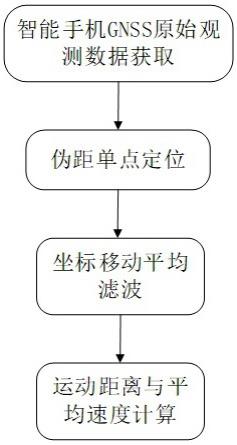
10.图1是发明方法技术方案流程图。
11.图2是直接单点定位和移动平均滤波后的平面点位分布图。
12.图3是直接单点定位和移动平均滤波后的高程时间序列图。
13.图4是本发明方法计算的距离和速度、基于单点定位坐标直接计算的距离和速度与参考值间的比较图。
具体实施方式
14.为了更了解本发明的技术内容,特举具体实施例并配合所附图式说明如下。在本发明中参照附图来描述本发明的各方面,附图中示出了许多说明性实施例。本发明的实施例不局限于附图所述。应当理解,本发明通过上面介绍的多种构思和实施例,以及下面详细描述的构思和实施方式中的任意一种来实现,这是因为本发明所公开的构思和实施例并不限于任何实施方式。另外,本发明公开的一些方面可以单独使用,或者与本发明公开的其他方面的任何适当组合来使用。
15.如图1所示,本发明的流程如下:一种基于智能手机gnss的运动距离和速度估计方法,执行以下步骤:s1、通过智能手机应用程序geo++ rinex logger记录gnss观测数据,读取其中的星历数据和伪距观测值。
16.s2、基于星历数据中提供的卫星坐标和卫星钟误差,以及各卫星至智能手机的伪距观测值,建立关于智能手机三维坐标的观测方程;然后,基于智能手机预设的初始近似坐标,对各个观测方程进行线性化处理,获得关于智能手机三维坐标改正数的线性观测方程,包括以下步骤s2.1至步骤s2.3:s2.1、按如下公式建立关于智能手机三维坐标的观测方程:,其中, 为伪距观测值, 为智能手机三维坐标,为卫星坐标, 为光速,为智能手机上的gnss接收机的钟误差, 为卫星钟误差, 为对流层延迟,为电离层延迟,为测量噪声未模型化的误差。
17.s2.2、对卫星钟误差、对流层延迟和电离层延迟进行模型改正,并忽略测量噪声未模型化误差后,基于智能手机的预设初始近似坐标,对各个观测方程进行线性化,得到关于智能手机三维坐标改正数的线性观测方程:,其中,为智能手机预设初始近似坐标,为智能手机三维坐标改正数,即初始近似坐标的改正数; 为按预设初始近似坐标计算的卫星至智能手机间的近似距离。
18.s2.3、按如下公式获得卫星至智能手机间的近似距离:。
19.s3、将步骤s2中各个线性化处理后的观测方程分别转化为误差方程形式,获得对应的误差方程组,并求解该误差方程组,获得智能手机三维坐标改正数,将智能手机三维坐标改正数加上智能手机的初始近似坐标,获得各时刻智能手机gnss单点定位坐标序列,包括以下步骤s3.1至步骤s3.3。
20.s3.1、按如下公式将各个线性化处理后的观测方程分别转化为误差方程:,其中,。
21.s3.2、对误差方程以最小二乘准则求解智能手机三维坐标改正数的值,即。
22.s3.3、按如下公式计算各个时刻智能手机gnss单点定位坐标值:,再获得智能手机gnss单点定位坐标序列为:,。
23.由于各类定位误差的存在,直接单点定位的坐标序列误差或噪声较大。对坐标序列进行移动平均去噪或平滑,则可降低坐标序列的噪声。坐标移动平均滤波是将某一时刻和之前若干时刻的坐标分量平均值作为该时刻的坐标分量值。
24.s4、对智能手机gnss单点定位坐标序列进行移动平均滤波处理,获得处理后的三维空间直角坐标序列,再将其转化为平面和高程组成的坐标序列;包括以下步骤s4.1至步骤s4.3:s4.1、按如下公式对智能手机gnss单点定位坐标序列进行移动平均滤波处理:,其中,为移动平均滤波处理后的坐标值,,为移动平均坐标点的数目;为总的坐标点数目,对于前 个坐标点,即时,直接取未移动平均滤波处理的坐标。
25.s4.2、将转换成大地经纬度坐标,其中,和分别为大地纬度和大地经度,为高程。
26.s4.3、将大地经纬度坐标中的进行高斯克吕格投影,获得其对应的平面坐标,之后获得对应的平面和高程组成的三维坐标。
27.s5、根据步骤s4获得的平面和高程组成的坐标序列,计算任意相邻两个时刻智能手机的运动距离,并获得智能手机运动的总距离、以及运动的平均速度。包括步骤s5.1至步骤s5.3:s5.1、按如下公式计算任意相邻两个时刻智能手机的运动距离:,其中, 、分别为任意相邻两个时刻,;s5.2、按如下公式计算智能手机运动的总距离:。
28.s5.3、按如下公式计算智能手机运动的平均速度:
,其中,为总的运动时长。
29.通过实施例计算了沿某操场某一特定跑道运动10圈后的总距离和平均速度。图2中左图显示的是对智能手机每秒的gnss观测值进行伪距单点定位得到的平面坐标,各时刻平面坐标与实际跑道有明显偏离,离散度较大,图3中灰色的点显示的是单点定位得到的高程坐标,高程序列上下波动较大,与实际操场较为平坦这一事实不符,说明智能手机gnss伪距单点定位得到的坐标存在较大的误差。使用本发明方法对单点定位坐标值进行移动平均后的结果如图2中右图和图3中黑色点所示。对比图2中左图和右图可知,通过本发明方法处理后,平面坐标序列噪声明显降低,各坐标点所构成的形状与跑道形状更加接近。对比图3中灰色和黑色点可知,通过本发明方法处理后,高程序列波动显著减小,这与实际情况更加接近。
30.图4左图显示的是本发明方法计算的距离、由智能手机gnss单点定位坐标直接计算的距离值以及由手推式滚轮测距仪测量得到的距离参考值,从图中可知,由单点定位坐标直接计算距离的误差非常大,而由本发明方法计算的距离与参考值非常接近,误差小于0.5%。图4右图显示的是本发明方法计算的运动速度、由智能手机gnss单点定位坐标直接计算的速度值以及由手推式滚轮测距仪测量结果推算的速度参考值,从图中可知,由单点定位坐标直接计算运动速度的误差非常大,而由本发明方法计算的速度值与参考值非常接近,误差小于0.5%。通过图4中各值的比较,清晰表明了本发明方法的有效性。
31.虽然本发明已以较佳实施例阐述如上,然其并非用以限定本发明。本发明所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,当可作各种的更动与润饰。因此,本发明的保护范围当视权利要求书所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1