地图绘制方法、装置和计算机可读存储介质与流程
本技术涉及互联网,具体涉及一种地图绘制方法、装置和计算机可读存储介质。
背景技术:
1、近年来,随着互联网技术的快速发展,地图产品被广泛应用,例如,应用于地图导航、智慧交通等场景。在进行地图绘制时,由于路网数据采集技术不全面或者工艺质检等问题,容易导致绘制出的地图中出现缺路的情况,尤其是出入口、匝道、连接路等短小类型的道路,且难以被发现。为此,在现有技术中,大多通过将地图中路网的图像和实际轨迹的图像进行差分,根据差分结果将地图中轨迹存在但是路网不存在的道路进行二次提取,以此来补充地图中缺失的路网。
2、在对现有技术的研究和实践过程中发现,由于地图中短小类型的道路长度较短、轨迹点较密集且与已有路网重合度较高,现有的通过将路网的图像和轨迹的图像进行差分来补充缺失路网的地图绘制方法,无法对短小类型的道路进行准确识别,使得地图绘制的准确性较低,进而导致地图绘制效率较低。
技术实现思路
1、本技术实施例提供一种地图绘制方法、装置和计算机可读存储介质,可以提高地图绘制的准确性,进而提升地图绘制效率。
2、本技术实施例提供一种地图绘制方法,包括:
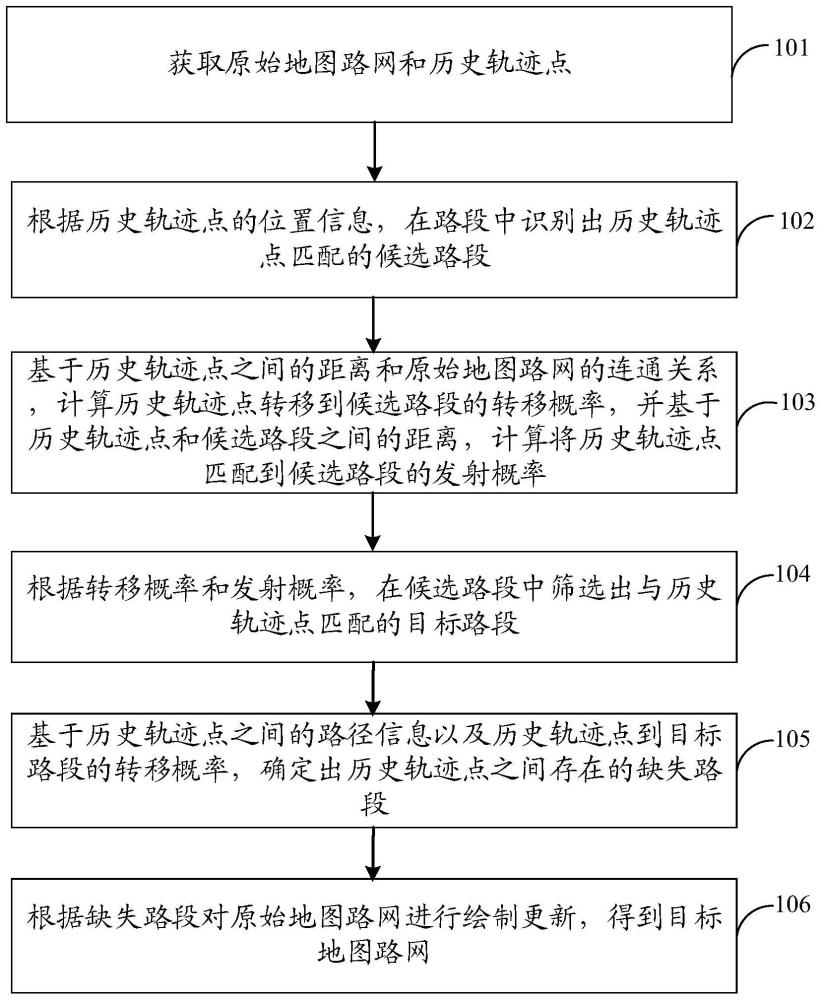
3、获取原始地图路网和历史轨迹点,所述原始地图路网中包括至少一个路段;
4、根据所述历史轨迹点的位置信息,在所述路段中识别出所述历史轨迹点匹配的候选路段;
5、基于所述历史轨迹点之间的距离和所述原始地图路网的连通关系,计算所述历史轨迹点转移到所述候选路段的转移概率,并基于所述历史轨迹点和候选路段之间的距离,计算将所述历史轨迹点匹配到所述候选路段的发射概率;
6、根据所述转移概率和发射概率,在所述候选路段中筛选出与所述历史轨迹点匹配的目标路段;
7、基于所述历史轨迹点之间的路径信息以及所述历史轨迹点到所述目标路段的转移概率,确定出所述历史轨迹点之间存在的缺失路段;
8、根据所述缺失路段对所述原始地图路网进行绘制更新,得到目标地图路网。
9、相应的,本技术实施例提供一种地图绘制装置,包括:
10、获取单元,用于获取原始地图路网和历史轨迹点,所述原始地图路网中包括至少一个路段;
11、识别单元,用于根据所述历史轨迹点的位置信息,在所述路段中识别出所述历史轨迹点匹配的候选路段;
12、计算单元,用于基于所述历史轨迹点之间的距离和所述原始地图路网的连通关系,计算所述历史轨迹点转移到所述候选路段的转移概率,并基于所述历史轨迹点和候选路段之间的距离,计算将所述历史轨迹点匹配到所述候选路段的发射概率;
13、筛选单元,用于根据所述转移概率和发射概率,在所述候选路段中筛选出与所述历史轨迹点匹配的目标路段;
14、确定单元,用于基于所述历史轨迹点之间的路径信息以及所述历史轨迹点到所述目标路段的转移概率,确定出所述历史轨迹点之间存在的缺失路段;
15、绘制单元,用于根据所述缺失路段对所述原始地图路网进行绘制更新,得到目标地图路网。
16、在一实施例中,所述确定单元,包括:
17、路段缺失概率计算子单元,用于基于所述历史轨迹点之间的路径信息以及所述历史轨迹点到所述目标路段的转移概率,计算所述历史轨迹点对应的路段缺失概率;
18、缺失路段识别子单元,用于根据所述路段缺失概率,识别出所述历史轨迹点之间存在的缺失路段。
19、在一实施例中,所述路段缺失概率计算子单元,包括:
20、目标规划路径距离识别模块,用于基于所述原始地图路网中的连通关系,识别出所述历史轨迹点和所述历史轨迹点对应的关联轨迹点之间的目标规划路径距离;
21、目标轨迹路径距离计算模块,用于根据所述历史轨迹点与关联轨迹点的位置信息,计算所述历史轨迹点与关联轨迹点之间的目标轨迹路径距离;
22、路段缺失概率计算模块,用于获取所述历史轨迹点基于所述关联轨迹点到所述目标路段的目标转移概率,并基于所述目标转移概率、所述目标规划路径距离以及直接路径距离,计算所述历史轨迹点对应的路段缺失概率。
23、在一实施例中,所述目标规划路径距离识别模块,包括:
24、确定子模块,用于在所述原始地图路网中确定出所述历史轨迹点在所述目标路段中的投影点,以及所述历史轨迹点对应的关联投影点,所述关联投影点为所述历史轨迹点的关联轨迹点在对应的关联目标路段中的投影点;
25、识别子模块,用于基于所述原始地图路网中的连通关系,识别出由所述关联投影点至所述投影点的规划路径;
26、计算子模块,用于基于所述规划路径,计算由所述关联投影点至所述投影点的目标规划路径距离。
27、在一实施例中,所述计算单元,包括:
28、轨迹路径距离计算子单元,用于根据所述历史轨迹点和所述历史轨迹点对应的关联轨迹点的位置信息,计算所述历史轨迹点和关联轨迹点之间的轨迹路径距离;
29、规划路径距离识别子单元,用于基于所述原始地图路网中的连通关系,识别出所述历史轨迹点和关联轨迹点之间的规划路径距离;
30、转移概率计算子单元,用于根据所述轨迹路径距离和规划路径距离,计算出所述历史轨迹点基于关联轨迹点转移到所述候选路段的转移概率。
31、在一实施例中,所述计算单元,包括:
32、投影距离计算子单元,用于在所述原始地图路网中识别出所述历史轨迹点在所述候选路段中的轨迹投影点,并计算出所述历史轨迹点到所述轨迹投影点的投影距离;
33、发射概率计算子单元,用于获取系统测量误差,并基于所述系统测量误差以及所述投影距离,计算将所述历史轨迹点匹配到所述候选路段的发射概率。
34、在一实施例中,所述识别单元,包括:
35、构建子单元,用于根据所述原始地图路网中分布的路段,构建所述原始地图路网对应的树状图结构;
36、生成子单元,用于基于所述历史轨迹点的位置信息,在所述树状图结构中生成所述历史轨迹点对应的搜索区域;
37、遍历子单元,用于根据所述搜索区域,对所述树状图结构进行遍历,得到所述历史轨迹点对应的候选路段。
38、在一实施例中,所述筛选单元,包括:
39、权重获取子单元,用于获取所述转移概率以及所述发射概率对应的概率权重;
40、加权子单元,用于基于所述概率权重分别对所述转移概率以及所述发射概率进行加权;
41、筛选子单元,用于将加权后的转移概率和发射概率进行融合,并根据所述候选路段对应的融合结果,在所述候选路段中筛选出目标路段。
42、此外,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行本技术实施例所提供的任一种地图绘制方法中的步骤。
43、此外,本技术实施例还提供一种计算机设备,包括处理器和存储器,所述存储器存储有应用程序,所述处理器用于运行所述存储器内的应用程序实现本技术实施例提供的地图绘制方法。
44、本技术实施例还提供一种计算机程序产品或计算机程序,所述计算机程序产品或计算机程序包括计算机指令,所述计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取所述计算机指令,处理器执行所述计算机指令,使得所述计算机设备执行本技术实施例提供的地图绘制方法中的步骤。
45、本技术实施例通过获取原始地图路网和历史轨迹点,原始地图路网中包括至少一个路段;根据历史轨迹点的位置信息,在路段中识别出历史轨迹点匹配的候选路段;基于历史轨迹点之间的距离和原始地图路网的连通关系,计算历史轨迹点转移到候选路段的转移概率,并基于历史轨迹点和候选路段之间的距离,计算将历史轨迹点匹配到候选路段的发射概率;根据转移概率和发射概率,在候选路段中筛选出与历史轨迹点匹配的目标路段;基于历史轨迹点之间的路径信息以及历史轨迹点到目标路段的转移概率,确定出历史轨迹点之间存在的缺失路段;根据缺失路段对原始地图路网进行绘制更新,得到目标地图路网。以此,通过计算历史轨迹点对应的转移概率以及发射概率,从而在原始地图路网中确定出历史轨迹点匹配的目标路段,并根据历史轨迹点之间的路径信息以及历史轨迹点到目标路段的转移概率确定出历史轨迹点之间存在的缺失路段,从而根据确定出的缺失路段对原始地图路网进行绘制更新,补充了原始地图路网中缺失的路段,提高了地图绘制的准确性,进而提升了地图绘制效率。
- 还没有人留言评论。精彩留言会获得点赞!