海洋宽温域非稳态模拟环境下水下变压增材修复试验装置
1.本发明涉及的是一种可实现热带、极地、深海等极端海洋模拟环境下水下激光增材修复的模拟试验装置,具体涉及一种适用于海洋宽温域非稳态模拟环境下水下变压增材修复试验装置。
背景技术:
2.随着海洋资源竞争的愈演愈烈,海洋工程装备水下关键部件的重要性大幅提升,水下关键部件长期在热带、极地、深海的极端海洋工况下服役,在流体的冲蚀、交变载荷和腐蚀环境影响下的水下关键部件极易出现磨损、腐蚀等损伤。同时,苛刻的海洋环境使得水下关键部件会受到大型海洋生物撞击、海洋压力突变等冲击损伤,使得水下构件在长期受到表面损伤、冲击损伤的耦合作用下易导致海洋工程装备出现整体结构失效,严重影响了海洋工程设施的服役安全性、可靠性及作业任务的正常完成。但基于执行远洋及深海任务下的海洋工程装备工作任务的特殊性,频繁的回坞维修将严重影响正常作业任务的安全有序进行,这决定了水下关键部件需要在极端海洋环境下进行水下修复。
3.对于水下在线修复而言,海洋环境的复杂性将会直接影响水下增材修复的进行。其中,海洋环境中的温度、压力、盐度、流场状态复杂多变,而且非稳态震荡状态的海洋环境也持续影响着水下在线修复的进行。然而,在实际海洋环境下进行水下在线修复的研究试验实施难度极大,且资金成本较高。因此,在进行水下在线修复试验时通常需要利用模拟试验装置来完成实际海洋环境的试验室模拟,以此实现水下修复的进行、试验数据的采集。目前,现有的水下激光增材修复模拟试验装置存在对实际的极端海洋环境因素考量与耦合性不足,且对水下激光增材修复的实施过程缺乏实时监控等问题,难以实现与实际极端海洋环境高契合度的水下激光增材修复模拟试验,严重制约了水下激光增材修复技术的进一步优化与发展。
4.因此,亟需发明一种可实现实时反馈优化、远程遥控、集成度高、控制精度高、与实际环境契合度高的水下增材修复模拟试验装置,从而实现在热带、极地、深海等多种极端海洋模拟环境下的水下激光增材修复模拟试验和修复过程的实时监测,对于极端海洋环境下水下激光增材修复技术的工艺优化、过程调控具有重要的指导意义,同时可为水下修复技术在多种极端海洋环境下的工程化应用提供技术支持和理论指导。
技术实现要素:
5.本发明的目的是为了解决现有的水下激光增材修复模拟试验装置存在对实际的极端海洋环境因素考量与耦合性不足的问题,而通过对极端海洋环境的高契合度模拟,实现热带、极地、深海等极端海洋环境影响因素的精准调控与多因素耦合,进而提供一种海洋宽温域非稳态模拟环境下水下变压增材修复试验装置,为研究典型极端海洋环境因素对水下激光增材修复技术的影响机制提供设备支持。
6.本发明海洋宽温域非稳态模拟环境下水下变压增材修复试验装置包括水压模拟
调节系统、水下专用激光增材修复系统、溶液自动供给调节系统和非稳态振动平台;其中所述的溶液自动供给调节系统包括主水箱、两个补排水箱和阀门,主水箱放置在耐压密封舱中,补排水箱分成上层补排水箱和下层补排水箱,主水箱呈凹字形空腔结构,主水箱的内凹处形成第一腔室,主水箱的内部空腔形成第二腔室,在第一腔室的侧壁上设置有一号补水-排水喷嘴组,一号补水-排水喷嘴组中的喷嘴分别通过管路与上层补排水箱相连通;在第二腔室的侧壁上设置有二号补水-排水喷嘴组,二号补水-排水喷嘴组中的喷嘴分别通过管路与下层补排水箱相连通,各喷嘴与补排水箱连通的管路上均设置有阀门;
7.水压模拟调节系统包括耐压密封舱、过渡舱、两个高压储气罐、两个压力调节控制器、进气喷嘴和排气喷嘴,在耐压密封舱的顶壁上设置有伺服电动夹爪,过渡舱横置在耐压密封舱的侧壁上,第二高压储气罐通过气管与过渡舱相连通,在气管上设置有第二压力调节控制器,进气喷嘴和排气喷嘴设置在耐压密封舱中,进气喷嘴通过连接管与第一高压储气罐相连通,在连接管上设置有第一压力调节控制器和气流流速控制仪;
8.水下专用激光增材修复系统包括激光器、水下激光枪头和移动手臂,激光器通过耐压光纤与水下激光枪头相连,移动手臂设置在耐压密封舱的顶壁上,水下激光枪头固定在移动手臂上并位于待修复工件上方;
9.耐压密封舱设置在多向非稳态振动平台上,通过夹持工作台夹固待修复工件。
10.本发明适用于海洋宽温域非稳态模拟环境下水下变压增材修复试验装置主要包括水压模拟调节系统、水下专用激光增材修复系统、溶液自动供给调节系统、非稳态震荡模拟系统;多向非稳态振动平台通过刚性连接固定于耐压密封舱下。激光准直仪和高速摄像机均置于耐压密封舱的第一腔室中,可以实现待修复工件精准定位及修复过程的细致观察。溶液自动供给调节系统的两个实时检测探头一端置于主水箱中,另一端与水环境检测集中控制柜相连通,通过控制与自动补排水阀门、补排水喷嘴的配合实现水位、盐度的变动模拟及熔池附近的流场设计,实时测温探头和温度调控模块可实现宽温域的水温的同步同位调节,红外测温仪与水下专用耐压激光枪头同时夹持在移动手臂上,且夹持角度可调,可实现熔池温度场的实施监控反馈,从而实现宽温域多极端水环境的模拟。
附图说明
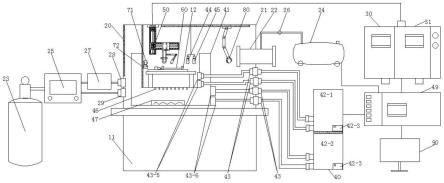
11.图1为本发明适用于海洋宽温域非稳态模拟环境下水下变压增材修复试验装置的整体结构示意图;
12.图2为移动手臂与激光枪头的结构示意图;
13.图3为水下夹持模拟工作台表面结构示意图;
14.图4为实施例中应用水下变压增材修复试验装置制备的水下激光修复涂层的摩擦系数曲线图;
15.图5为实施例中应用水下变压增材修复试验装置制备的水下激光修复涂层的摩擦形貌图。
具体实施方式
16.具体实施方式一:本实施方式海洋宽温域非稳态模拟环境下水下变压增材修复试验装置包括水压模拟调节系统20、水下专用激光增材修复系统30、溶液自动供给调节系统
40和非稳态振动平台11;其中所述的溶液自动供给调节系统40包括主水箱41、两个补排水箱和阀门43,主水箱41放置在耐压密封舱21中,补排水箱分成上层补排水箱42-1和下层补排水箱42-2,主水箱41呈凹字形空腔结构,主水箱41的内凹处形成第一腔室,主水箱41的内部空腔形成第二腔室,在第一腔室的侧壁上设置有一号补水-排水喷嘴组43-5,一号补水-排水喷嘴组43-5中的喷嘴分别通过管路与上层补排水箱42-1相连通;在第二腔室的侧壁上设置有二号补水-排水喷嘴组43-6,二号补水-排水喷嘴组43-6中的喷嘴分别通过管路与下层补排水箱42-2相连通,各喷嘴与补排水箱连通的管路上均设置有阀门43;
17.水压模拟调节系统20包括耐压密封舱21、过渡舱22、两个高压储气罐、两个压力调节控制器、进气喷嘴28和排气喷嘴29,在耐压密封舱21的顶壁上设置有伺服电动夹爪80,过渡舱22横置在耐压密封舱21的侧壁上,第二高压储气罐24通过气管与过渡舱22相连通,在气管上设置有第二压力调节控制器26,进气喷嘴28和排气喷嘴29设置在耐压密封舱21中,进气喷嘴28通过连接管与第一高压储气罐23相连通,在连接管上设置有第一压力调节控制器25和气流流速控制仪27;
18.水下专用激光增材修复系统30包括激光器31、水下激光枪头33和移动手臂50,激光器31通过耐压光纤与水下激光枪头33相连,移动手臂50设置在耐压密封舱21的顶壁上,水下激光枪头33固定在移动手臂50上并位于待修复工件60上方;
19.耐压密封舱21设置在多向非稳态振动平台11上,通过夹持工作台12夹固待修复工件60。
20.本实施方式通过补水喷嘴实现熔池附近的流场设计及水流速度、边界条件的控制。
21.本实施方式待修复工件60可通过过渡舱22进入耐压密封舱21,保证过渡舱与耐压密封舱的压力差值尽量小。控制伺服电动夹爪80可实现待修复工件60的移动、固定;伺服电动夹爪80上连接有伺服电机80-3,通过伺服电机80-3控制导向组件80-1在滑轨80-4上移动。
22.具体实施方式二:本实施方式与具体实施方式一不同的是在主水箱41的第一腔室中还设置有水质盐度检测探头44和实时水位检测探头45。
23.具体实施方式三:本实施方式与具体实施方式一或二不同的是在主水箱41的第二腔室中还设置有实时测温探头46和温度调控模块47。
24.具体实施方式四:本实施方式与具体实施方式一至三之一不同的是上层补排水箱42-1与水环境检测集中控制柜49相连通。
25.具体实施方式五:本实施方式与具体实施方式一至四之一不同的是在主水箱41的第一腔室中设置有高速摄像机71。
26.本实施方式高速摄像机71可沿滑轨上下移动。
27.具体实施方式六:本实施方式与具体实施方式一至五之一不同的是在耐压密封舱21的顶壁设置有滑轨,伺服电动夹爪80与该滑轨滑动连接。
28.具体实施方式七:本实施方式与具体实施方式一至六之一不同的是在移动手臂50上还设置有红外测温仪34。
29.本实施方式红外测温仪34通过铰接连杆54连接在移动手臂上。
30.具体实施方式八:本实施方式与具体实施方式一至七之一不同的是上层补排水箱
42-1和下层补排水箱42-2中分别设置有温控调节器42-3。
31.本实施方式通过温控调节器在进行水流流动模拟实验时,控制输入水流温度。可在下层补排水箱42-2中加入防冻液,以实现0℃以下的水温。
32.具体实施方式九:本实施方式与具体实施方式一至八之一不同的是移动手臂50包括x向导向组件51、y向导向组件52和z向组件53,x向导向组件51由x向滑轨51-1、x向移动块51-3、x向电机51-2和第一丝杆组成,x向滑轨51-1垂直设置,x向移动块51-3套设在第一丝杆上,第一丝杆由x向电机51-2驱动带动x向移动块51-3在x向滑轨51-1上移动,y向导向组件52水平设置并固定在x向移动块51-3上;y向导向组件52由y向滑轨52-1、y向移动块52-3、y向电机52-2和第二丝杆组成,y向移动块52-3套设在第二丝杆上,第二丝杆由y向电机52-2驱动带动y向移动块52-3在y向滑轨52-1上移动,z向组件53安装在y向移动块52-3上,水下激光枪头33安装在z向组件53上。
33.本实施方式z向组件的底部设置转盘,水下激光枪头安装在转盘上,便于调整水下激光枪头位置。
34.具体实施方式十:本实施方式与具体实施方式一至九之一不同的是控制多向非稳态振动平台11的振动频率为1~100hz。
35.本实施方式控制多向非稳态振动平台11可实现水平、纵向、垂直三种单一方向及水平、纵向双向耦合的振动,多向非稳态振动平台11的振动频率为1~100hz。
36.具体实施方式十一:本实施方式与具体实施方式一至十之一不同的是夹持工作台12包括固定板13、移动板14、电动推杆15和底座16,在底座16上设置固定板13、移动板14、电动推杆15和底座16,电动推杆15与移动板14相连,待修复工件60夹固在固定板13和移动板14之间。
37.实施例:本实施例海洋宽温域非稳态模拟环境下水下变压增材修复试验装置包括水压模拟调节系统20、水下专用激光增材修复系统30、溶液自动供给调节系统40和非稳态振动平台11;其中所述的溶液自动供给调节系统40包括主水箱41、两个补排水箱、阀门43和温度调控模块47,主水箱41放置在耐压密封舱21中,补排水箱分成上层补排水箱42-1和下层补排水箱42-2,主水箱41呈凹字形空腔结构,主水箱41的内凹处形成第一腔室,主水箱41的内部空腔形成第二腔室,在第一腔室的侧壁上设置有一号补水-排水喷嘴组43-5,一号补水-排水喷嘴组43-5中的喷嘴分别通过管路与上层补排水箱42-1相连通;在第二腔室的侧壁上设置有二号补水-排水喷嘴组43-6,二号补水-排水喷嘴组43-6中的喷嘴分别通过管路与下层补排水箱42-2相连通,各喷嘴与补排水箱42连通的管路上均设置有阀门43;
38.水压模拟调节系统20包括耐压密封舱21、过渡舱22、两个高压储气罐、两个压力调节控制器、进气喷嘴28和排气喷嘴29,在耐压密封舱21的顶壁上设置有伺服电动夹爪80,过渡舱22横置在耐压密封舱21的侧壁上,过渡舱22的舱口与耐压密封舱21连通,第二高压储气罐24通过气管与过渡舱22相连通,在气管上设置有第二压力调节控制器26,进气喷嘴28和排气喷嘴29设置在耐压密封舱21中,进气喷嘴28通过连接管与第一高压储气罐23相连通,在连接管上设置有第一压力调节控制器25和气流流速控制仪27;
39.水下专用激光增材修复系统30包括激光器31、水下激光枪头33和移动手臂50,激光器31通过耐压光纤与水下激光枪头33相连,移动手臂50设置在耐压密封舱21的顶壁上,水下激光枪头33固定在移动手臂50上并位于待修复工件60上方,移动手臂50包括x向导向
组件51、y向导向组件52和z向组件53,x向导向组件51由x向滑轨51-1、x向移动块51-3、x向电机51-2和第一丝杆组成,x向滑轨51-1垂直设置,x向移动块51-3套设在第一丝杆上,第一丝杆由x向电机51-2驱动带动x向移动块51-3在x向滑轨51-1上移动,y向导向组件52水平设置并固定在x向移动块51-3上;y向导向组件52由y向滑轨52-1、y向移动块52-3、y向电机52-2和第二丝杆组成,y向移动块52-3套设在第二丝杆上,第二丝杆由y向电机52-2驱动带动y向移动块52-3在y向滑轨52-1上移动,z向组件53安装在y向移动块52-3上,水下激光枪头33安装在z向组件53上;
40.耐压密封舱21设置在多向非稳态振动平台11上,通过夹持工作台12夹固待修复工件60。
41.本实施例中激光器31、红外测温仪34、移动手臂50、高速摄像机71、激光准直仪72和伺服电动夹爪80与控制系统连接,并由计算机90进行控制。补水喷嘴内设有小型螺旋桨,伺服电机带动小型螺旋桨可实现熔池附近的流场控制及水流速度、边界条件的控制。
42.应用本实施例海洋宽温域非稳态模拟环境下水下变压增材修复试验装置进行水下增材修复试验的过程如下:
43.步骤一:将待修复工件60放置进入过渡舱22,使用伺服电动夹爪80将待修复工件60放置于夹持工作台12上,并根据激光准直仪72确定工件摆放平直,调节好待修复工件60的固定位置、高度,利用电动推杆15移动滑动板14将待修复工件60固定;
44.步骤二:通过一号补水-排水喷嘴组43-5将上层补排水箱42-1中的溶液汇入第一腔室,并打开自动流速调节阀门43,根据实时水位检测探头保证第一腔室达到预定水位后,打开自动流速出水阀门43,设定好两个阀门的流速为预定流速;
45.步骤三:将下层补排水箱42-2中溶液通过二号补水-排水喷嘴组43-6注入第二腔室中,打开实时测温探头46和温度调控模块47,调节水温至预定水温;打开高压储气罐23和进气喷嘴28,调节压力调节控制器25、气流流速控制仪27,获得固定压力、流速的高压气流;
46.步骤四:打开多向非稳态振动平台11,设定振动方向和振动频率;
47.步骤五:通过控制系统控制移动手臂50,利用高速摄像机71对水下待修复工件60进行观测,依据观测信息完成增材修复的路径规划;
48.步骤六:打开激光器31和红外测温仪34,按照已规划的修复路径,以移动手臂50作为运动机构,依据确定的工艺参数完成水下激光增材修复试验;
49.步骤七:关闭激光器31、移动手臂50和红外测温仪34;关闭高压储气罐23、压力调节控制器25、气流流速控制仪27,打开出气喷嘴29;关闭自动流速调节补水阀门43-1、补水喷嘴43-9、实时测温探头46、温度调控模块47,待耐压密封舱21压力恢复正常,主水箱41内溶液排出,取出待修复工件60。
50.本实施例中,待修复工件为eh40板材,尺寸为100
×
100
×
10mm,多向非稳态振动平台的振动模式为20hz水平振动模拟海洋水平的振动,激光功率2500w,激光扫描速度为5mm/s,光斑直径1mm,水环境为模拟海水溶液(包括nacl、kcl、mgcl2等),模拟水下20m的修复环境(海水的密度约1.025
×
103kg/m3,水下20m的压强p=ρgh=1.025
×
103kg/m3×
9.8
×
20pa=0.2009mpa,约为2个大气压),流速0.5m/s,水温控制为4℃。图4和图5为应用海洋宽温域非稳态模拟环境下水下变压增材修复试验装置得到的水下激光修复涂层的测试图。
51.本实施例能够精确快捷有效的在热带、极地、深海等海洋环境下对修复过程中的
宽温域非稳态水下变压极端水环境进行模拟,使得激光水下在线修复过程中水环境的影响因素实现可控调节,进一步优化水下在线修复工艺。以便于考察在模拟极端海洋环境下温度、压力、盐度、流场状态、非稳态震荡对激光修复过程中的组织演变规律、气孔及裂纹等缺陷形成机理、残余应力产生及演变机制的影响,为水下激光增材修复机理验证提供设备支持,为水下关键部件的激光增材修复提供实验条件。
52.本发明提供了一种适用于的海洋宽温域非稳态模拟环境下水下变压增材修复试验装置,能够在热带、极地、深海等极端海洋环境下对待修复区域进行同步水环境模拟,实现水环境的影响因素可控调节,从而在实验室条件下实现对实际海洋环境下多种极端工况下的水下激光增材修复模拟试验,使试验测试结果更加真实可靠,最终为实现海洋工程装备零部件在热带、极地、深海的极端海洋环境下的在线高质量修复提供理论指导及技术支持。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1