一种水下俯仰回转二自由度测试装置及使用方法与流程
1.本发明属于试验测试设备制造领域,具体涉及一种水下俯仰回转二自由度测试装置及使用方法。
背景技术:
2.声学装置是利用水声技术,发射和接收声信号,进行测距、测深、测向,在工业领域和军工领域应用广泛,声学装置在水下的测试、验证是生产过程中的重要组成部分,现行传统做法为人工在水面上将声学装置调整好一个角度,再放到水下测试,需测试另一个角度时再升到水面人工调整,不仅费时费力,而且不能实现动态测试。
技术实现要素:
3.本发明的目的是提供一种水下俯仰回转二自由度测试装置及使用方法,以自动控制声学装置在水下不同姿态的变化,进行有关水声技术的测试、试验、验证,最大真实的模拟声学装置的实际工况本发明的目的是通过以下技术手段实现的,一种水下俯仰回转二自由度测试装置,包括龙门主机架和俯仰机架,龙门主机架包括相互平行的第一竖向连接柱和第二竖向连接柱,以及连接在两者之间的第一横梁,第一竖向连接柱外侧连接有俯仰伺服减速电机,第一竖向连接柱内侧还连接有第一轴承法兰和主传动轴,主传动轴插入第一轴承法兰的轴承中并与俯仰伺服减速电机输出孔相连;第二竖向连接柱的内侧还连接有第二轴承法兰,第二轴承法兰的轴承内插有从动轴,从动轴与主传动轴位于同一直线上,俯仰机架包括工装板和两个连接在工装板侧面的第三竖向连接柱,两个第三竖向连接柱的另一端分别和主传动轴以及从动轴相连,工装板下侧连接有齿式交叉滚子轴承,工装板上侧还连接有回转伺服电机,回转伺服电机输出轴穿过工装板伸至下侧,回转伺服电机输出轴通过联轴器连接有小齿轮,小齿轮和齿式交叉滚子轴承外侧的齿轮齿形相啮合,齿式交叉滚子轴承下侧还连接有测试板。
4.所述第一横梁顶部还连接有吊装法兰。
5.所述第一横梁下方还设置有第二横梁,第二横梁两端分别与第一竖向连接柱和第二竖向连接柱内侧壁相连,吊装法兰两侧还连接有固定板,固定板向下延伸,同时与第一横梁和第二横梁侧面相连。
6.所述第二竖向连接柱的外侧还连接有第二轴承法兰,内外两侧的第二轴承法兰处于同一直线上,且两个第二轴承法兰之间的第二竖向连接柱上,开有与第二轴承法兰轴承相匹配的轴承孔,从动轴插入两个第二轴承法兰的轴承内。
7.所述第一竖向连接柱外侧连接有电机安装座,俯仰伺服减速电机连接在电机安装座上。
8.所述齿式交叉滚子轴承内圈与工装板相连,齿式交叉滚子轴承外圈与测试板相连。
9.还包括回转伺服电机安装座,回转伺服电机安装座连接在工装板上,回转伺服电机连接在回转伺服电机安装座上端,回转伺服电机输出轴穿过回转伺服电机安装座和工装板通过联轴器与小齿轮相连。
10.所述俯仰机架上还连接有姿态传感器。
11.一种水下俯仰回转二自由度测试装置使用方法,将被测声学装置安装在测试板上,俯仰伺服减速电机启动,带动主传动轴和从动轴转动,使得俯仰机架改变俯仰角度;回转伺服电机启动,输出轴及联轴器带动小齿轮转动,齿式交叉滚子轴承外侧的齿轮齿形被小齿轮所驱动,使得齿式交叉滚子轴承外圈及连接在外圈上的测试板一同转动,测试板上的被测声学装置实现360
°
自由转动。
12.本发明的有益效果在于:通过俯仰机架和齿式交叉滚子轴承实现俯仰和回转,使得被测声学装置可以在水下自由调整姿态。
13.俯仰机架和龙门主机架均为悬臂式结构,被测声学装置安装在测试板上发射接收信号前端无遮挡,能够真实模拟水下姿态。
附图说明
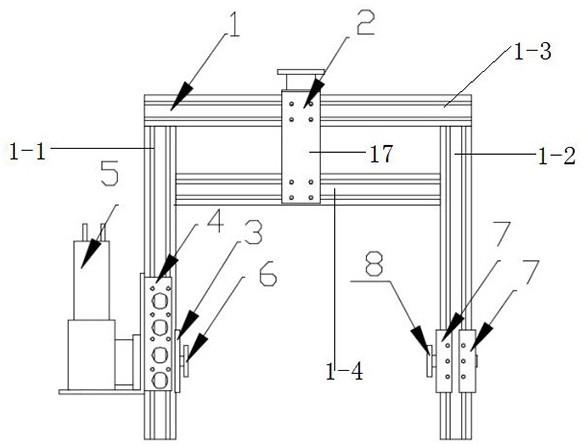
14.图1为龙门主机架结构示意图;图2为俯仰机架及齿式交叉滚子轴承结构示意图;图3为电机安装座结构示意图;图4为俯仰机架结构示意图;图5为回转伺服电机安装座结构示意图;图6为水下俯仰回转二自由度测试装置结构示意图;图中1龙门主机架;1-1第一竖向连接柱;1-2第二竖向连接柱;1-3第一横梁;1-4第二横梁;2吊装法兰;3第一轴承法兰;4电机安装座;5俯仰伺服减速电机;6主传动轴;7第二轴承法兰;8从动轴;9俯仰机架;10齿式交叉滚子轴承;11回转伺服电机安装座;12回转伺服电机;13小齿轮;14工装板;15第三竖向连接柱;16;测试板;17固定板。
15.以下将结合附图及实施例对本发明做进一步详细说明。
具体实施方式
16.【实施例1】一种水下俯仰回转二自由度测试装置,包括龙门主机架1和俯仰机架9,龙门主机架1包括相互平行的第一竖向连接柱1-1和第二竖向连接柱1-2,以及连接在两者之间的第一横梁1-3,第一竖向连接柱1-1外侧连接有俯仰伺服减速电机5,第一竖向连接柱1-1内侧还连接有第一轴承法兰3和主传动轴6,主传动轴6插入第一轴承法兰3的轴承中并与俯仰伺服减速电机5输出孔相连;第二竖向连接柱1-2的内侧还连接有第二轴承法兰7,第二轴承法兰7的轴承内插有从动轴8,从动轴8与主传动轴6位于同一直线上,俯仰机架9包括工装板14和两个连接在工装板14侧面的第三竖向连接柱15,两个第三竖向连接柱15的另一端分别和主传动轴6以及从动轴8相连,工装板14下侧连接有齿式交叉滚子轴承10,工装板14上侧还连接有回转伺服电机12,回转伺服电机12输出轴穿过工装板14伸至下侧,回转伺服电机12输出轴通过联轴器连接有小齿轮13,小齿轮13和齿式交叉滚子轴承10外侧的齿轮齿形相啮
合,齿式交叉滚子轴承10下侧还连接有测试板16。
17.如图1、图2、图4和图6所示,龙门主机架1由两个第一竖向连接柱1-1和第二竖向连接柱1-2,以及连接两者顶端的第一横梁1-3组成。
18.第一竖向连接柱1-1内侧连接第一轴承法兰3,其中第一轴承法兰3的法兰部连接在第一竖向连接柱1-1上起固定作用,俯仰伺服减速电机5输出端为输出孔,主传动轴6从内侧向外插入第一轴承法兰3轴承部并与俯仰伺服减速电机5输出孔通过扭键相连,使得俯仰伺服减速电机5可以驱动主传动轴6转动。俯仰伺服减速电机5电机特性为低转速大扭矩, 电机输出轴上安装有绝对值编码器,密封在电机壳体内,电机带断电刹车保护功能。减速机特性为涡轮蜗杆减速机, 利用涡轮蜗杆的自锁功能,在极端失电的情况下具有保护功能。
19.同样,第二竖向连接柱1-2的内侧还连接有第二轴承法兰7,第二轴承法兰7的轴承内插有从动轴8,使得从动轴8可以依靠轴承实现转动。并且从动轴8与主传动轴6位于同一直线上,第一轴承法兰3、俯仰伺服减速电机5输出孔和第二轴承法兰7自然也处于同一直线上。第一轴承法兰3和第二轴承法兰7的轴承为水密轴承,可长时间水下使用,轴承座带法兰,通过防松螺钉、螺母固定在龙门主机架1上。
20.俯仰机架包括圆形的工装板14,以及工装板14对侧连接的两个第三竖向连接柱15,一个第三竖向连接柱15与主传动轴6相连,另一个与从动轴8相连。这样俯仰伺服减速电机5转动驱动主传动轴6时,俯仰机架也随着产生传动趋势,由于另一侧的从动轴8也是可转动的,俯仰机架最终实现俯仰转动。
21.工装板14下侧连接齿式交叉滚子轴承10,齿式交叉滚子轴承10下方连接测试板16,测试板16大于齿式交叉滚子轴承10本身,多余出的空间用来连接被测声学装置。
22.工装板14下方还设置有小齿轮13,小齿轮13与齿式交叉滚子轴承10外侧的齿轮齿形相啮合,工装板14上方的回转伺服电机12输出轴从上至下并通过联轴器与小齿轮13相连,来驱动小齿轮13转动,而小齿轮13通过啮合的齿轮齿形带动齿式交叉滚子轴承10和测试板16转动。回转伺服电机12特征在于电机特性为低转速大扭矩, 电机输出轴上安装有绝对值编码器,密封在电机壳体内,电机带断电刹车保护功能【实施例2】如图1和图6所示,所述第一横梁1-3顶部还连接有吊装法兰2。
23.吊装法兰2用于与外部的伸缩结构相连,将整个水下俯仰回转二自由度测试装置下方到水中。
24.所述第一横梁1-3下方还设置有第二横梁1-4,第二横梁1-4两端分别与第一竖向连接柱1-1和第二竖向连接柱1-2内侧壁相连,吊装法兰2两侧还连接有固定板17,固定板17向下延伸,同时与第一横梁1-3和第二横梁1-4侧面相连。
25.如图1和图5所示,第一横梁1-3下方还有第二横梁1-4,这样整个龙门主机架1上端形成四边形,整体结构更加稳定。
26.吊装法兰2两个还连接有固定板17,一侧的固定板17同时连在第一横梁1-3和第二横梁1-4侧面,一方面使得吊装法兰2连接更牢固,同时强化了整个龙门主机架1的稳定性。
27.如图1所示,所述第二竖向连接柱1-2的外侧还连接有第二轴承法兰7,内外两侧的第二轴承法兰7处于同一直线上,且两个第二轴承法兰7之间的第二竖向连接柱1-2上,开有与第二轴承法兰7轴承相匹配的轴承孔,从动轴8插入两个第二轴承法兰7的轴承内。
28.第二竖向连接柱1-2的外侧还有一个第二轴承法兰7,从动轴8依次插入内侧和外侧第二轴承法兰7的轴承内,同时插入两个轴承内,使得从动轴8转动更加稳定。
29.所述第一竖向连接柱1-1外侧连接有电机安装座4,俯仰伺服减速电机5连接在电机安装座4上。
30.如图3所示,l形的电机安装座4,包括主板、两翼侧板、底板组成,主板、两翼侧板均采用防松螺钉固定在龙门主机架1上,底板上有止口,仰伺服减速电机5固定在底板上。
31.所述齿式交叉滚子轴承10内圈与工装板14相连,齿式交叉滚子轴承10外圈与测试板16相连。
32.齿式交叉滚子轴承10滚动体为圆柱滚子,互成100
°
垂直排列在v型滚道中,滚子之间由隔离块隔开。轴承可以承受轴向载荷、径向载荷和倾覆力矩等各个方向的载荷。交叉滚子轴承内圈和外圈均为整体结构,都有安装孔,能够获得稳定的旋转精度和扭矩。
33.内圈固定在工装板14上,又小齿轮13带动外圈360
°
自由转动。
34.如图5所示,还包括回转伺服电机安装座11,回转伺服电机安装座11连接在工装板14上,回转伺服电机12连接在回转伺服电机安装座11上端,回转伺服电机12输出轴穿过回转伺服电机安装座11和工装板14通过联轴器与小齿轮13相连。
35.回转伺服电机安装座11为内部中空的圆柱形,回转伺服电机12输出轴从中空中穿过。
36.所述俯仰机架9上还连接有姿态传感器,实时反馈声学装置在水下的速度,角度等参数。
37.一种水下俯仰回转二自由度测试装置使用方法,将被测声学装置安装在测试板16上,俯仰伺服减速电机5启动,带动主传动轴6和从动轴8转动,使得俯仰机架9改变俯仰角度;回转伺服电机12启动,输出轴及联轴器带动小齿轮13转动,齿式交叉滚子轴承10外侧的齿轮齿形被小齿轮13所驱动,使得齿式交叉滚子轴承10外圈及连接在外圈上的测试板16一同转动,测试板16上的被测声学装置实现360
°
自由转动。
38.在使用时,先将吊装法兰2与外部伸缩结构相连,好将整个装置不断下放到水中,将被测声学设备安装到测试板16上,用电缆将回转伺服电机12和俯仰伺服减速电机5分别与控制设备相连,好根据需要启动两个电机。
39.当调节俯仰角度时,启动俯仰伺服减速电机5,输出孔转动带动主传动轴6转动,进而带动从动轴8即两者之间的俯仰机架转动。
40.调节声学机构角度时,回转伺服电机12输出轴转动带动小齿轮13转动,小齿轮13带动齿式交叉滚子轴承10外圈转动,而连接在外圈上的测试板16即其上的被测声学组件随之改变角度。本装置设计重量轻、刚度大、密封性能可靠,俯仰、回转角度plc控制,pid调节,角度准确。能够真实反映声学装置在水下角度。
41.本实施例没有详细叙述的部件和结构属本行业的公知部件和常用结构或常用手段,这里不一一叙述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1