基于UUV集群的移动多基地声呐目标定位和误差分析方法
基于uuv集群的移动多基地声呐目标定位和误差分析方法
技术领域
1.本发明属于水下目标探测技术领域,具体涉及一种可移动多基地声呐目标定位和误差分析方法。
背景技术:
2.随着水下声隐身技术的发展,有关多基地声呐定位技术的研究已经成为声呐技术领域研究的热点。多基地声呐系统可以使用多部不同功能的声呐进行阵列布置,从不同方向同时探测目标,利用各方向反射能量来探测隐身目标,有较强的抗目标隐身能力,是反潜作战的有效手段。
3.近年来,国内外学者围绕多基地声呐的最优站址布局、定位方法、优化算法以及结合神经网络的测量结果预处理方法展开了大量研究并取得了众多成果。多基地声呐系统通过获取关于目标的距离、方位角和俯仰角等测量信息,根据这些测量量和各个收发基站的空间几何关系,利用定位算法计算确定目标的估计位置。专利cn113406645a采用平均声速最小二乘法进行目标定位,修改平均声速数值重复进行上述过程,直到最佳平均声速使结果满足误差要求,建立了基于声线入射角的新的平均声速定位模型,解决了采用单一声速从而导致的定位精度低的问题。专利cn110837086a公开了一种基于侧扫声呐的海底目标定位方法和定位系统,通过获取侧扫声呐的经纬度信息和声呐距离海底平面的高度信息,得到声呐的位置信息,然后计算姿态矫正矩阵对目标位置进行估计。其结合了声呐的gps坐标、水深信息和船体姿态参数,对海底目标和声呐位置进行修正,从而获得精确的目标位置坐标。专利cn112946574a通过对多源数据进行预处理控制数据质量,顾及声信号传播过程中换能器位置的变化,通过声线跟踪进行声线弯曲修正,削弱误差影响,提高定位精度。以上几种声呐定位方法都涉及到对测量数据或者计算结果进行重复修正,以达到减小误差因素、提高定位精度的目的,属于基于传统多基地定位模型的算法优化方案。专利cn110346802a同样基于常规多基地声呐定位算法,同时计算水声信道调频信号参数,采用状态识别方法确定目标,如果信号能量减弱或分散到其他信道,即存在目标。这种目标定位方法充分利用了多基地声呐探测范围大、隐蔽性好和抗干扰能力强的特性。专利cn214310877u公开了一种用于水母数量探测的自行移动声呐装置,该装置安装在船舷上,利用延伸架上固定的第二电机驱动导辊架上的拉绳,而且拉绳的一端贯穿滑轮连接有高分辨多波束声呐,配合停船可实时对海域水母进行声呐探测。将多基地声呐系统的基站安装在uuv上组成多基地声呐集群,传统的多基地声呐系统一般由声呐浮标或者航空吊放声呐组成,在站址布局上单一固定,在目标区域内的定位精度无法提高。利用基于水下无人集群的移动多基地声呐系统可以在移动状态下进行目标初步定位,随后进行布阵调整,来降低目标区域的定位误差,确保目标位置估计精度、提高探测距离,而传统的多基地声呐定位方法缺少移动状态下的定位能力。
技术实现要素:
4.为了克服现有技术的不足,本发明提供了一种基于uuv集群的移动多基地声呐目标定位和误差分析方法,将多个收发基站集群化并且可以保持一定的速度整体移动,从而构建动态的多基地声呐系统定位模型,结合优势队形理论进行布局调整,利用高定位精度的定位布局进行目标的精密定位,并且给出相应配置条件下的动态多基地声呐误差分布情况,将静态的多基地声呐系统定位方法扩展到动态系统定位,并且给出动态系统定位的误差分布图,为后续进一步对多基地声呐定位方法和误差分析研究提供了新颖有效的方案。本发明实现了多基地声呐在动态情况的探测和定位精度的仿真,填补了多基地声呐的仿真研究在这一方面的空缺。
5.本发明解决其技术问题所采用的技术方案包括如下步骤:
6.步骤1:根据多基地声呐定位模型,将多基地声呐集群化并且赋予其动态的特性,构建基于uuv集群的移动多基地声呐系统配置模型,画出移动多基地声呐集群系统的拓扑图,确定各个移动基站间的几何关系以及实际物理含义;
7.步骤2:基于移动多基地声呐系统配置模型,确定移动多基地声呐系统移动过程中基站的位置关系,利用移动发射站发射的同一束探测信号到达各个基站时的基站位置关系建立目标定位方程;通过计算得出移动多基地声呐集群定位目标的估计值;具体如下:
8.假设发射站初始时刻坐标为t(x
t
,y
t
),n个接收站初始时刻坐标为r1(x
r1
,y
r1
)、r2(x
r2
,y
r2
)、
…
、rn(x
rn
,y
rn
),r
t
为发射站发射的探测信号声波经目标反射第一次到达移动后的发射站的距离,r
σ1
,r
σ2
,
…rσn
分别为声波从发射站经目标反射后第一次到达各个接收站的距离;假如发射站在t1时刻开始发射探测信号,同时各个接收站开始接收目标回波,经过
△
t时间探测信号经目标反射后第一次到达发射站,记此刻发射站坐标为t(x
t
′
,y
t
′
),经过时间
△
t1后回波信号第一次到达接收站r1,记录接收站r1此刻坐标为r1(x1,y1),同理,记录回波信号第一次到达其它接收站坐标为r2(x2,y2),
…rn
(xn,yn);结合发射站和接收站的坐标和测量信息,根据初试时刻发射站位置和目标相对位置恒定的原则给出如下移动多基地声呐的目标定位方程:
[0009][0010]
式中:
[0011][0012]
其中v是基于uuv集群多基地声呐的航速,单位是km/s,航向角为θ,单位为rad;i=1,2,
…
,n;目标位置估计值由定位方程计算得出。
[0013]
步骤3:分析移动多基地声呐的定位方程,进一步计算得到移动多基地声呐误差分布方程;
[0014]
对目标定位方程两边进行微分得到移动多基地声呐的误差方程:
[0015][0016]
式中:
[0017][0018]kt
′
=t1dx
t
′
+t2dy
t
′
[0019]kri
=r
i1
dxi+r
i2
dyi[0020]
将误差方程(2)写为矩阵形式并利用伪逆法解得目标的定位误差估计值:
[0021]
dv=cdx+dxs[0022]
dx=(c
t
c)-1ct
[dv-dxs]
t
[0023]
式中,dv=[dr
∑1-dr
t dr
∑2-dr
t
ꢀ…ꢀ
dr
∑n-dr
t
]
t
,dx=[dx dy]
t
,dxs=[-k
r1
+k
t
′ꢀ‑kr2
+k
t
′ꢀ…ꢀ‑krn
+k
t
′
]
t
;
[0024]
故定位误差的协方差为:
[0025]
p
dx
=e[dxdx
t
]=(c
t
c)-1ct
{e[dvdv
t
]+e[dxsdx
st
]}((c
t
c)-1ct
)
t
[0026]
对于移动多基地声呐系统,其定位精度表示为:
[0027]
步骤4:利用matlab软件搭建基于uuv集群的移动多基地声呐定位误差分布的仿真环境,确定移动多基地声呐集群相关参数,对水下目标定位算法和定位误差分布进行数值仿真,得到误差分布图。
[0028]
本发明的有益效果如下:
[0029]
由于采用基于uuv集群的移动多基地声呐系统配置,将传统的由浮标或者航空吊放声呐组成的静态多基地声呐拓展到移动多基地声呐系统,并且通过分析移动系统的定位原理,给出了移动状态下多基地声呐的定位和误差分布方程,有效解决了移动状态中的多基地声呐系统目标探测和误差分析的问题,并且实现了多基地声呐在动态情况的探测和定位精度的仿真,填补了多基地声呐的仿真研究在这一方面的空缺。
附图说明
[0030]
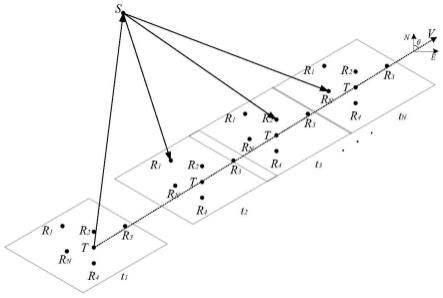
图1为本发明实施例基于uuv集群的移动多基地声呐系统配置拓扑图。
[0031]
图2为本发明实施例三接收站的移动多基地声呐系统配置拓扑图。
[0032]
图3为本发明实施例基于uuv集群的移动多基地声呐目标定位精度gdop三维分布示意图。
[0033]
图4为本发明实施该基于uuv集群的移动多基地声呐目标定位精度gdop等高线分布示意图。
具体实施方式
[0034]
下面结合附图和实施例对本发明进一步说明。
[0035]
本发明的目的在于,提出一种基于uuv集群的移动多基地声呐目标定位算法和误差分析方法,在构建移动多基地声呐定位模型的基础上进行算法研究,给出移动多基地声呐的定位算法,然后围绕该定位算法进行定位精度的误差分析,从而为多基地声呐提供了一种新型动态状态下的目标定位和误差分析方法。
[0036]
目前对于多基地声呐水下目标定位方法,大多数都是由海上浮标和航空吊放声呐所组成的多基地声呐布控在某一片海域实施定位的,一定区域内的定位精度无法进一步提高,而本发明提出了一种基于uuv集群的移动多基地声呐目标定位和误差分析方法,将多个收发基站集群化并且可以保持一定的速度整体移动,从而构建动态的多基地声呐系统定位模型,这种方法的优点在于多基地声呐集群在运动状态中可以对目标位置完成定位,结合优势队形理论进行布局调整,利用高定位精度的定位布局进行目标的精密定位。并且给出相应配置条件下的动态多基地声呐误差分布情况,能够反映该集群声呐系统保持一定速度移动时的目标定位精度,将静态的多基地声呐系统定位方法扩展到动态系统定位,并且给出动态系统定位的误差分布图,为后续进一步对多基地声呐定位方法和误差分析研究提供了新颖有效的方案。
[0037]
为实现上述目的,基于uuv集群的移动多基地声呐目标定位算法和误差分析方法所采用的技术方案主要包括以下几个步骤:
[0038]
步骤1:在传统多基地声呐定位模型的基础上,将多基地声呐集群化并且赋予其动态的特性,确定各个移动基站间的几何关系以及实际物理含义;
[0039]
研究基于uuv集群可移动的动态多基地声呐定位算法,构建动态多基地声呐系统配置模型,画出动态多基地声呐集群系统的拓扑图,分析移动中各基站的测量信息和几何关系,为研究移动多基地声呐定位原理做准备。
[0040]
步骤2:基于移动多基地声呐的系统配置模型,把各个动态基站的测量信息与基站几何关系相融合,确定动态uuv集群的多基地声呐系统移动过程中基站的位置关系,利用移动发射站发射的同一束探测脉冲到达各个基站时的基站位置关系每个基站的测量信息,分析建立动态多基地声呐集群的目标定位原理,进一步给出目标定位方程,通过计算可以得出动态多基地声呐集群定位目标的估计值。
[0041]
步骤3:动态多基地声呐系统对水下目标,有很多因素会影响的系统的定位性能,结合传统多基地声呐系统的误差影响因素,讨论引起动态集群系统定位误差的因素,如:站址测量误差、时间和角度测量误差、集群的航行速度误差和航向角误差等,在此定位算法和误差分析模型下,研究多基地集群的航速和航向角以及其相关误差对于定位性能的影响。分析动态多基地声呐的定位方程,通过对动态多基地声呐集群的定位方程两边微分,进一
步计算给出动态多基地声呐误差分布方程;进而可以研究动态声呐集群的航速和航向角以及其引起的相关误差对于定位精度的影响情况。
[0042]
步骤4:利用matlab软件搭建基于uuv集群的动态多基地声呐定位误差分布的仿真环境,以三接受站动态多基地声呐系统配置为例,确定动态多基地声呐集群相关参数,对水下目标定位算法和定位误差分布进行数值仿真,给出误差分布图。
[0043]
以单发射站和三个接收站的动态多基地声呐系统配制模型为例,选定仿真参数:目标海域范围为x方向
±
20km,y方向
±
20km,移动声呐集群航速1节,航向角为北偏东30度,利用matlab对该配置条件的动态多基地声呐集群的定位性能进行仿真计算。
[0044]
具体实施例:
[0045]
1、在传统多基地声呐定位模型的基础上,将多基地声呐集群化并且赋予其动态的特性,进而搭建起基于uuv集群的移动多基地声呐系统配置模型,确定各个移动基站间的几何关系以及实际物理含义;
[0046]
基于uuv集群的移动多基地声呐系统配置拓扑图如图1,图中t为收发站,发射主动声探测信号照射目标,r1,r2,...rn为接收站,接收目标回波,s表示目标位置,t1为初试时刻即多基地声呐集群从此刻开始执行目标定位任务,t2…
tn依次是目标反射回波到达各个接收站的时间,该声呐集群航向角为θ(北偏东0-360度为正),航速为v。
[0047]
2、基于移动多基地声呐的系统配置模型,把各个动态基站的测量信息与基站几何关系相融合,以发射站发射的同一个声波到达移动的各个基站的位置关系建立目标定位方程;
[0048]
假设各基站初始时刻坐标为t(x
t
,y
t
),r1(x
r1
,y
r1
),r2(x
r2
,y
r2
),
…rn
(x
rn
,y
rn
),r
t
为发射站发射的探测信号声波经目标反射第一次到达移动后发射站的距离,r
σ1
,r
σ2
,
…rσn
分别为声波从发射站经目标反射后第一次到达各个接收站的距离。假如发射基站在t1时刻开始发射探测信号,同时各个基站开始接收目标回波,经过
△
t探测信号经目标反射后第一次到达t站,记此刻发射站坐标为t(x
t
′
,y
t
′
),经过时间
△
t1后回波信号第一次到达接收站r1,记录其此刻坐标为r1(x1,y1),同理,记录回波信号第一次到达其它接收基站坐标为r2(x2,y2),
…rn
(xn,yn)。在该过程中探测信号都是由初试的发射站到目标反射后依次到达各个移动中的基站,结合上述发射站和接收站的坐标和测量信息,根据初试时刻发射站位置和目标相对位置恒定的原则可以给出如下移动多基地声呐的目标定位方程:
[0049][0050]
式中:
[0051][0052]
其中v是基于uuv集群多基地声呐的航速,单位是km/s,航向角为θ,单位为rad。目
标位置估计值可以由定位方程计算得出。
[0053]
3、动态多基地声呐系统对水下目标,有很多因素会影响的系统的定位性能,如:站址测量误差、时间和角度测量误差、集群的航行速度误差和航向角误差等,通过分析动态多基地声呐的定位方程,进一步计算给出动态多基地声呐误差分布方程;
[0054]
影响移动多基地声呐系统定位误差的因素有很多,比如:各个基站测量信息、集群系统航速和航向角、站址布局、不同海深的声速不同以及复杂的海洋环境等,在此定位算法和误差分析模型下,我们可以研究多基地集群的航速和航向角以及其相关误差对于定位性能的影响。通过对目标定位方程两边进行微分即可得到移动多基地声呐的误差方程:
[0055][0056]
式中:
[0057][0058]kt
′
=t1dx
t
′
+t2dy
t
′
[0059]kri
=r
i1
dxi+r
i2
dyi[0060]
其中i=1,
…
,n,将上述误差方程写为矩阵形式并利用伪逆法即可解得目标的定位误差估计值:
[0061]
dv=cdx+dxs[0062]
dx=(c
t
c)-1ct
[dv-dxs]
t
[0063]
故定位误差的协方差为:
[0064]
p
dx
=e[dxdx
t
]=(c
t
c)-1ct
{e[dvdv
t
]+e[dxsdx
st
]}((c
t
c)-1ct
)
t
[0065]
对于该移动多基地声呐系统,其定位精度可以表示为:
[0066]
4、利用matlab软件搭建基于uuv集群的动态多基地声呐定位误差分布仿真环境,以三接受站动态多基地声呐系统配置为例,确定动态多基地声呐集群相关参数,对水下目标定位算法和定位误差分布进行数值仿真,给出误差分布图。
[0067]
以三接收站的移动多基地声呐系统为例,monte-carlo模拟100次。仿真参数如下:目标海域范围x方向
±
20km,y方向
±
20km,水中声速vc=1.5km/s,时间测量误差和站址测量误差分别为σ
τ
=1ms,σs=5m,uuv集群航速误差和航向角误差分别为σv=0.001km/s和σ
τ
=0.001rad,初始时刻发射站和接收站坐标为:t站坐标(0,0)km,r1站坐标(-5.196,-3)km,r2站坐标(5.196,-3)km,r3站坐标(0,6)km,该三接收站移动多基地声呐系统配置模型如图2所示。
[0068]
根据以上基于uuv集群的移动多基地声呐定位原理和误差计算原理,利用matlab
进行三接收站的移动多基地声呐定位算法以及误差数值仿真建模,该移动多基地声呐定位误差的三维gdop分布情况如图3所示,图4是等高线gdop分布图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1