一种水下目标内孤立波载荷测量系统及测量方法与流程
1.本发明涉及船舶与海洋工程领域,尤其涉及一种水下目标内孤立波载荷测量系统及测量方法。
背景技术:
2.水下垂直运动目标作为现代潜艇的核心武器之一,其隐身性及精准性是设计过程中必须考虑的重要因素。但海洋当中频繁发生的内波现象,不仅直接影响目标的结构强度,还会使目标的出筒姿态发生偏差,甚至影响其在水中的运动过程,引发掉落“砸艇”的巨大风险。尤其在我国南海海域,海水密度层化现象显著,海底地形变化剧烈,流态格局多变,这些都为该海域内波的产生提供了天然的海洋环境条件。对于水下垂直运动目标来说,如果在水下大深度进行试验,目标就需要经过变密度层,在水平方向遭遇内波,甚至大尺度内孤立波的剪切。和均一密度流体相比,密度分层效应会在横向和垂向对运动体产生更大的剪切作用,增加了目标运动姿态的不稳定性,对目标出水姿态造成影响。
3.由于海洋内波对水下垂直运动目标的作用情况、地理条件的限制和现场实射的不可能性,数值和实验研究成为主要的研究方法和手段。目前,针对水下垂直运动目标在内波环境中的安全性研究,大多停留在数值理论研究方面,鲜少涉及到其在分层流体中的实验研究。
技术实现要素:
4.针对上述现有技术中的不足,本发明提供一种水下目标内孤立波载荷测量系统及测量方法,既可模拟目标对内孤立波诱导流场的相干特性,还可有效测量作用于目标表面上的内孤立波载荷,从而为实海域内孤立波与目标相互作用的预测提供可靠的理论依据和技术保障。
5.为了实现上述目的,本发明的技术方案如下:
6.一种水下目标内孤立波载荷测量系统,包括水下垂直运动目标模型、载荷测量系统、螺杆连接装置、支撑装置。
7.所述支撑装置包括多层面板和多根螺杆;所述面板为上下平行设置,其上设有螺杆安装孔,相邻两层面板之间通过螺杆进行连接固定。
8.所述水下垂直运动目标模型,为按照实际待测量目标进行等比例制作的模型,其顶端开孔洞;所述螺杆连接装置的一端安装于孔洞内,另一端连接支撑装置的最下层面板。
9.所述载荷测量系统包括测力天平、连接件和电脑端;所述连接件固定在支撑装置最上层的面板的中部,测力天平固定于连接件上,且与电脑端相连,电脑端采集测力天平信号。
10.优选地,所述水下垂直运动目标模型和支撑装置面板的材质为有机玻璃。
11.优选地,所述连接件的材质为铝。
12.一种水下目标内孤立波载荷测量方法,采用上述测量系统,具体如下:
13.步骤一、对测量系统进行配重
14.将水下垂直运动目标模型按相应的吃水深度置于密度分层内波水槽内,对测量系统进行配重,使测量系统处于零悬浮力状态;
15.步骤二、对测力天平进行标定
16.对测力天平分别沿水平和垂直方向按比例进行加载与卸载,获得测力天平的电信号与水平力、垂向力之间的标定关系,获得标定曲线;
17.步骤三、水下垂直运动目标模型的内孤立波载荷测量
18.将测力天平的信号置零,电脑端实时采集测力天平的电信号数据后,根据标定曲线换算成测量系统的内孤立波水平力、垂向力,即获得水下垂直运动目标模型的内孤立波载荷。
19.本发明由于采用了以上技术方案,使其具有以下有益效果:
20.本发明的实验系统由水下垂直运动目标模型、载荷测量系统、螺杆连接装置和支撑装置等组成,操作便捷,可行性高,既可模拟目标对内孤立波诱导流场的相干特性,还可有效测量作用于目标结构上的载荷,进而为实海域水下垂直运动目标的运动姿态预测提供相关参数。
附图说明
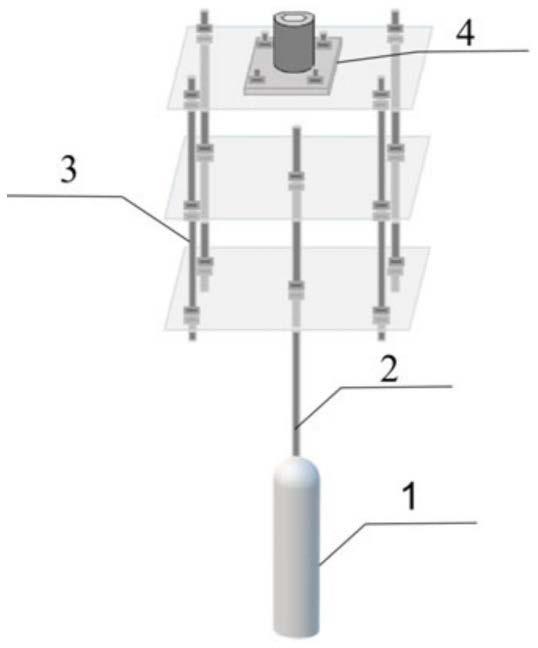
21.图1水下目标内孤立波载荷测量系统结构示意图;
22.图2水平x方向三分力天平标定曲线;
23.图3水平y方向三分力天平标定曲线;
24.图4水平z方向三分力天平标定曲线;
25.图5目标内孤立波水平载荷时历测量结果及理论值对比;
26.图6目标内孤立波垂向载荷时历测量结果及理论值对比。
27.图中:1水下垂直运动目标模型;2螺杆连接装置;3支撑装置;4载荷测量系统。
具体实施方式
28.以下结合附图和技术方案,进一步说明本发明的具体实施方式。
29.如图1所示,本发明实施例的一种水下目标内孤立波载荷测量系统,包括水下垂直运动目标模型1、载荷测量系统4、螺杆连接装置2、支撑装置3;螺杆链接装置2连接水下垂直运动目标模型1和支撑装置3;载荷测量设备安装在支撑装置3上。具体结构如下:
30.支撑装置3包括三层方形有机玻璃面板和四根螺杆,面板四角设有螺杆安装孔,通过螺杆将三层有机玻璃面板连为一体。
31.载荷测量系统4包括三分力测力天平、连接件和电脑端,测力天平通过连接件安装在最上层的有机玻璃面板上,电脑端采集测力天平的电信号。
32.水下垂直运动目标模型1为按照实际待测量目标进行等比例制作的模型,顶端开1个直径3cm的圆柱形孔洞,1根细螺杆分别置于目标内部的圆柱形孔洞中。采用这种方法设计的测力系统,一方面可以测量目标受力,另一方面可以模拟目标对内孤立波诱导流场的相干特性。
33.具体测量过程如下:
34.在实验前,首先对测量系统进行配重和对测力天平进行标定,在配重时使平台模型处于零悬浮力状态,然后分别沿水平和垂直方向按比例加载与卸载,获得测力天平的电信号与水平力、垂向力之间的标定关系,获得标定曲线。在测力天平采集数据之前将其信号置零,以减少装置自重以及模型安装误差对测力信号的影响;在内孤立波作用下,水下垂直运动目标模型将其受力传递给测力天平,通过电脑端进行数据采集;在采集得到测力天平的电信号数据后,根据标定曲线将电信号转化为模型受力,获得目标模型水平、纵向及垂向力时历。
35.本实施例中,测力天平可同时测量目标水平力、纵向力及垂向力,各个方向力的量程分别为水平力0-0.15kg,纵向力0-0.15kg,垂向力0-0.18kg,测量精度高于0.1%。在图2~4中,给出了研制天平的标定曲线,由图可知,测力天平的测量信号与相应力之间具有良好的线性关系。水平x方向标定关系为:加载y=1275.4x+1.645,卸载y=1259x-1.806;水平y方向标定关系为:加载y=1105x-2.3038,卸载y=1112.2x-6.7214;垂向z方向标定关系为:加载y=786.07x+0.5879,卸载y=1396.2+1.22。
36.本实施例中,将实际海洋密度层化结构简化均匀的两层流体,假设上下层流体均为不可压缩的无旋的理想流体,记h1和h2分别为流体处于静平衡状态时上下层流体的深度,则总水深h=h1+h2。实验模拟在0.35*h上层流体厚度情况,h=100m,共做了8个工况的测量实验。在实验中,沿水槽横向作用在目标上的水平力x与纵向力y相比相当小,因此在随后的计算中水平x方向的力忽略不计,目标内孤立波水平载荷计算只涉及到水平y方向的力,内孤立波理论模型采用ekdv模型。
37.目标内孤立波水平载荷时历测量结果如图5所示。结果表明,在一定深度下,目标理论计算和采用本发明测量所得的水平荷载时历特性基本上完全匹配,只是峰值和谷值处的值略有不同,这是由于理论计算中没有考虑能量耗散所导致的。目标内孤立波垂向载荷时历测量结果如图6所示,图中可看出,在先导孤立子到达模型中心轴之前,垂直力随时间的推移而增大,其峰值出现在内孤立波穿过目标模型时,然后减小,垂向载荷随时间的变化趋势基本一致,验证了所提水下目标内孤立波载荷测量系统及方法是合理的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1