一种苹果外部品质旋转式在线检测设备及分析方法与流程
1.本发明属于一般的图像数据处理或产生技术领域,具体为一种旋转式苹果外部品质在线检测设备。
背景技术:
2.苹果是我国水果的主要产物,是日常生活中最常见、消耗量最大的水果品种之一,面对逐年增加的消费市场和日渐细分的加工领域,对苹果的品质分级显得尤为重要,能够保证苹果相关产业生产的标准化,明确苹果产品等级,提升苹果附加值。而我国苹果分级大都依靠果农人工进行,对苹果等级判断以经验为主,仅有少部分大规模种植和集体收购的苹果能够进入工厂化分选线,导致大量苹果质量参差不齐,与出口分级标准存在差异,不利于苹果加工生产和出口贸易,与农业先进国家相比,我国苹果采后分级处理设备较少,技术水平较低,现有的通过开口大小不同的滚动筛或辊轴等结构,将不同直径大小的苹果筛入不同等级料箱中机械化分级分选仅能用于针对苹果尺寸的分级,局限性较大,且由于滚动筛机械结构的设置,苹果需下落,容易在检测中对苹果外部造成二次损伤,利用机器视觉进行苹果无损检测设备存在无法完全获取苹果表面全部信息,检测结果不具有代表性,以及造成重复检测,降低检测速度和光学检测设备使用寿命等问题。
3.因此,急需一种新型的旋转式苹果外部品质在线检测设备及与其匹配的分析方法,设计链轮链条传动安装在双链条上可以自转的果杯从而带动苹果自转检测设备,利用双相机机器视觉技术和开发的面积不变投影算法对苹果的大小、红度和缺陷类别进行在线检测,获取信息全面,检测速度快且结果具有代表性。
技术实现要素:
4.针对背景技术中存在的问题,本发明提供了一种旋转式苹果外部品质在线检测设备,其特征在于,包括:机架、电机、同步带、旋转输送装置、摩擦板、光电箱、侧挡板和落料装置,其中旋转输送装置、摩擦板、光电箱和落料装置均安装于机架的桌面上,落料装置位于旋转输送装置的出料侧,两块对称的侧挡板分别设置于旋转输送装置的两侧,用于品质检测的光电箱位于摩擦板的正上方;电机安装于机架的桌面下方,电机通过同步带与旋转输送装置的主动轴相连形成带传动;
5.旋转输送装置包括:旋转果杯、两组传动链条、四个链轮、主动轴、从动轴、从动轴支撑组件和主动轴支撑组件;其中平行设置的主动轴和从动轴分别通过主动轴支撑组件和从动轴支撑组件安装于机架上,两组传动链条平行设置,与传动链条啮合的四个链轮两两一组安装于主动轴和从动轴上,传动链条上等间距安装有可以自由旋转的旋转果杯;摩擦板的上端面与行驶至上层的旋转果杯的下沿摩擦,并带动其旋转;
6.旋转输送装置将苹果向出料侧输送并经过光电箱,光电箱包括:暗箱和两台相机、两台互成一定角度的相机安装在暗箱中,两台相机的视野中心线交点在苹果中心行进路线上。
7.链轮在主动轴上的安装方式为:主动轴中间大阶梯的左右两端分别过盈配合安装两个同角度的链轮,主动轴与主动轴支撑组件相连;主动轴支撑组件包括:主动轴轴承座、主动轴紧固件和轴安装板,主动轴轴承座的一端与主动轴轴承连接,另一端与主动轴紧固件连接,主动轴紧固件固定于轴安装板上,轴安装板固定在机架上;
8.链轮在主动轴上的安装方式为:从动轴中间大阶梯的左右两端分别过盈配合两个同角度链轮,从动轴与从动轴支撑组件相连,从动轴支撑组件包括:从动轴轴承座、从动轴紧固件和轴安装板,从动轴轴承座与从动轴通过轴承相连,从动轴轴承座采用横向安装方式,使检测出口伸出机架外便于苹果落入落料装置中,从动轴紧固件为半工字形,一端固定从动轴轴承座,一端固定在轴安装板上,轴安装板固定于机架上。
9.所述光电箱还包括:支撑立柱、相机安装夹具和灯条,支撑立柱焊接于机架上从侧挡板中档板短板的槽口伸出,暗箱的顶面设计为边形的多面体,暗箱通过四根支撑立柱支撑设置在档板正上方,均使用一块平板包围,前面和后面分别朝向苹果的入料侧和出料侧,左面和右面为相机安装面;在暗箱的顶部和前后侧面共设8组灯条槽,用于安装灯条。
10.所述旋转果杯包括:两个果杯主体、内轴、外空心轴、锁紧螺母、筒形突出部和紧固螺钉;其中圆台形的果杯主体为高强度黑色橡胶果杯,果杯主体的小端面外一体固接有筒形突出部,沿果杯主体的轴线开有圆形通孔,果杯主体和筒形突出部通过涨紧安装在外空心轴上,从而随外空心轴一同转动;外空心轴套装在实心内轴的外侧并与实心内轴间隙配合;内轴的两端安装有防止外空心轴脱落的紧固螺钉;两个筒形突出部紧贴从而在两个果杯主体之间形成一个允许苹果放入的区域。
11.所述摩擦板上方的摩擦纹路为爬虫形状,摩擦板通过四个7形支撑件安装于机架上;7形支撑件的横条板和竖条板上分别开有用于调整位置的长条孔;从而使得摩擦板的安装高度与果杯主体相切,保证果杯在向前输送使并顺利滚动;
12.侧挡板包括:短板、长板和挡板支撑组件,其中长板和短板为一块正板使用钣金成型,短板和长板间夹角为60
°
,短板的下方通过与挡板支撑组件连接,短板接近旋转果杯,用于防止意外颠簸导致的滚动苹果的滑落;在短板靠近弯折处开长方形槽口,从而允许光电箱下方的支撑立柱穿过;挡板支撑组件包括:两个v形支撑件和两个梯形支撑件,其中两个v形支撑件一前一后焊接在对应的7形支撑件上;梯形支撑件的外侧与短板的下侧焊接,梯形支撑件的斜面与长板内侧焊接,梯形支撑件斜面与外侧面呈60
°
夹角,与短板和长板的夹角保持一致,一个 v形支撑件与所对应的梯形支撑件通过螺栓连接。
13.还提供了一种基于所述的旋转式苹果外部品质在线检测设备的分析方法,其特征在于,所述分析方法包括:
14.步骤1、计算当前苹果的平均半径和裁剪宽度;
15.所述平均半径其中(xc,yc)为中心点c的坐标, (xn,yn)为苹果轮廓线的坐标;
16.所述裁剪宽度d=v/f,其中f为相机拍摄的帧速,v为苹果的线速度;
17.步骤2、两个相机所采集到的两组图像均进行裁剪,然后合并全部裁剪图片形成全宽大图,其中每张图像裁剪的长度以苹果周长l=2πr为截取长度;
18.步骤3、计算两张全宽大图中各横行的理论长度,并按比例缩放进行长度调整;
19.步骤4、对长度调整后的两组图像均进行双相机重复区域和单相机重复区域的裁剪;
20.步骤5、合并两组图像生成苹果表面展开图。
21.在步骤1之前,先获取完整的图像,具体为:
22.将苹果放在旋转输送装置首端的旋转果杯上,苹果和果杯随着链轮链条传动向前传动到摩擦板段,果杯由于生成的摩擦力产生力矩开始旋转,带动苹果自转,在摩擦板段苹果约能转动1-2周,当完整苹果出现在相机视野内时软件触发两台相机开始获取图像,相机按照30帧每秒的速度拍摄苹果图像直至在视野内的苹果不再完整,相机停止获取图像;每个相机均采集到一组图像。
23.所述步骤2中对各行理论长度c
th
=2
×
π
×
mm124.其中,球体的苹果表面上的像素任意点m,与苹果旋转轴的实际距离为mm1:
[0025][0026][0027]
式中,r
t
为样品轮廓半径、β为co与do夹角、α为mo与co夹角、l为m点到旋转轴od的距离,h为m点到视野中心oc的距离;
[0028][0029]
式中,h为相机与苹果的垂直距离、l为相机与苹果的水平距离、d为相机与样品间距、 f为相机焦距、y
mc
为图像中的像素行数;
[0030]
最后:
[0031][0032]
式中,c
th
为该行图像理论长度、c
max
为苹果周长、n为缩放系数、w为该行图像原始像素数、w
p
该行图像理论像素数。
[0033]
在步骤5之后,进行:
[0034]
步骤6、对苹果表面展开图进一步进行颜色提取,分别计算提取的红色区域的像素面积和完整展开图的像素面积,计算红色区域面积占表面展开图总面积比,利用深度学习建立苹果完整面积不变展开图上表面缺陷种类判断模型,进行大小、红度和表面缺陷种类三种外部品质的分析,最后对待检测苹果进行表面缺陷种类进行预测。
[0035]
本发明的有益效果在于:
[0036]
1.采用新型旋转果杯,两个相同的圆台形高强度黑色橡胶果杯顶面相对涨紧安装
在空心外空心轴上,套在实心内轴上,并用螺母锁紧使外空心轴仅能转动不会相对内轴左右运动导致脱轨,内轴左右固定于两链条相对的带孔安装直板上,果杯在链轮链条将果杯向前传动的同时,在摩擦板的摩擦力作用下进行自转。
[0037]
2.旋转双射式检测方式,待测苹果放在旋转果杯上,运行到光电检测箱下方即摩擦板上时,旋转果杯开始自转苹果则会相对反方向旋转,光电检测箱中采用双相机拍摄获取图像,可以同时采集到苹果的果梗端和花萼端信息,实现了苹果表面信息全方位获取。
[0038]
3.面积不变投影算法,将两相机获取的图像进行裁剪拼接,再按桑逊投影的思想开发面积不变投影算法,使类球形的立体苹果按照面积不变原则展开为二维图像,避免重复检测。
附图说明
[0039]
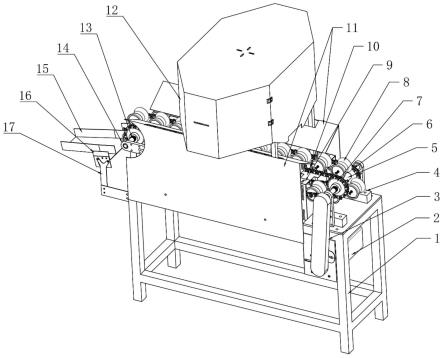
图1为本发明一种旋转式苹果外部品质在线检测设备实施例的结构示意图;
[0040]
图2为本发明的实施例中旋转输送装置结构示意图;
[0041]
图3为本发明的实施例中只显示一个旋转果杯附近的结构示意图;
[0042]
图4为本发明的实施例中过旋转果杯径面的断面图;
[0043]
图5为本发明的实施例中摩擦板、挡板及挡板支撑组件结构示意图;
[0044]
图6为本发明的实施例中光电箱中关键部件结构示意图;
[0045]
图7为本发明实施例中落料装置结构示意图;
[0046]
图8为本发明的一种旋转式苹果外部品质在线分析方法实施例中相机拍摄旋转苹果视野 (坐标固定点)的侧视图;
[0047]
图9为本发明的方法实施例中相机拍摄旋转苹果视野(坐标固定点)的斜视图;
[0048]
图10为本发明实施例中两相机的全宽大图;
[0049]
图11为本发明实施例中苹果环形表面区域对应展开原理图;
[0050]
图12为本发明实施例中某一刻两相机采集到的单个图像;
[0051]
图13为本发明实施例中苹果侧视与坐标固定点的对应图;
[0052]
图14为本发明实施例中m点不同位置的示意图;
[0053]
图15为本发明实施例中两组图像中裁剪双相机重复区域和单相机重复区域的区域示意图;
[0054]
图16为本发明实施例中的苹果表面展开图。
[0055]
其中,1-机架,2-电机,3-同步带,4-主动轴支撑件,5-主动轴,6-链条,7-链轮,8-旋转果杯,9-摩擦板,10-挡板支撑组件,11-侧挡板,12-光电箱,13-从动轴,14-从动轴支撑件, 15-落料槽,16-安装横板,17-安装支架,401-轴安装板,402-主动轴紧固件,403-主动轴轴承座,601-安装板,1401-螺母,1402-从动轴紧固件,1403-从动轴轴承座,601-安装直板,801
‑ꢀ
锁紧螺母,802-内轴,803-外空心轴,804-果杯主体,805-紧固螺钉,806-筒形突出部,1001-7 形支撑件,1002-v形支撑件,1003-梯形支撑件,1101-长板,1102-短板,901-暗箱,902-灯条, 903-相机安装夹具,904-相机,905-支撑立柱,1701-角度调节板,1702-y形支撑件,1703-长条横板。
具体实施方式
[0056]
以下结合附图对本发明作进一步的详细说明。
[0057]
如图1~图7所示的本发明实施例,包括:机架1、电机2、同步带3、旋转输送装置、摩擦板 9、光电箱12、侧挡板11和落料装置,其中旋转输送装置、摩擦板9、光电箱12和落料装置均安装于机架1的桌面上,落料装置位于旋转输送装置的出料侧,两块对称的侧挡板11分别设置于旋转输送装置的两侧,用于品质检测的光电箱12位于摩擦板9的正上方;电机2安装于机架1的桌面下方,电机2通过同步带3与旋转输送装置的主动轴相连形成带传动;
[0058]
如图1~图4所示,旋转输送装置将苹果向出料侧输送并经过光电箱12,旋转输送装置包括:旋转果杯8、两组传动链条6、四个链轮7、主动轴5、从动轴13、从动轴支撑组件14和主动轴支撑组件(图中未标记);其中平行设置的主动轴5和从动轴13分别通过主动轴支撑组件和从动轴支撑组件安装于机架1上,两组传动链条6平行设置,与传动链条6啮合的四个链轮7两两一组安装于主动轴5和从动轴13上,传动链条6上等间距安装有可以自由旋转的旋转果杯8;摩擦板9 的上端面与行驶至上层的旋转果杯8的下沿摩擦,并带动其旋转。
[0059]
链轮7在主动轴5上的安装方式为:主动轴5中间大阶梯的左右两端分别过盈配合安装两个同角度的链轮7,靠安装链轮7外侧主动轴5的阶梯上攻15mm的m12的螺纹,用螺母1401锁紧固定链轮7,防止链轮轴向运动,主动轴5与主动轴支撑组件14相连,主动轴支撑组件14包括:螺母1401、轴承、主动轴轴承座403、主动轴紧固件402和轴安装板401,主动轴轴承座403一端台阶中安装轴承与主动轴13连接,竖直安装,另一端与主动轴紧固件402连接,主动轴紧固件402 固定于轴安装板401上,轴安装板401固定在机架1上。
[0060]
链轮7在主动轴5上的安装方式为:从动轴13中间大阶梯的左右两端分别过盈配合两个同角度链轮7,从动轴13与从动轴支撑组件14相连,从动轴支撑组件14包括螺母1401、轴承、从动轴轴承座1403、从动轴紧固件1402和轴安装板401,从动轴轴承座1403与从动轴13通过轴承相连,从动轴轴承座1403采用横向安装方式,使检测出口伸出机架1外便于苹果落入落料装置中,从动轴紧固件1402为半工字形,一端固定从动轴轴承座1403,一端固定在轴安装板401上,轴安装板401固定于机架1上。
[0061]
旋转果杯8等间距安装于传动链条6上的方式为:传动链条6每隔三个节距固接由一块带孔安装直板601;带孔安装直板601上开有允许旋转果杯8中的内轴802两端穿过的果杯轴安装孔,安装传动链条6时使左右两侧的安装直板601的位置一一对应。
[0062]
在本实施例中,所使用的传动链条6为08b型标准传动链条;带孔安装直板601的尺寸为宽 9mm,高13mm的;果杯轴安装孔的直径为3mm;两旋转果杯8的间距小于待检测苹果平均尺寸的1/3。
[0063]
如图3所示的旋转果杯8包括:两个果杯主体804、内轴802、外空心轴803、锁紧螺母801、筒形突出部806和紧固螺钉805;其中圆台形的果杯主体804为高强度黑色橡胶果杯,果杯主体 804的小端面外一体固接有筒形突出部806,筒形突出部806和果杯主体804的轴线共线;果杯主体804和筒形突出部806通过涨紧安装在外空心轴803上,从而随外空心轴803一同转动;外空心轴803套装在实心内轴802的外侧并与实心内轴802间隙配合;内轴802的两端安装有防止外空心轴803脱落的紧固螺钉805;两个筒形突出部806紧贴从而在两个果杯主体804之间形成一个允许苹果放入的区域;
[0064]
果杯主体804的高度为24mm,大端面圆直径为72mm,小端面圆直径为58mm,沿果杯
主体804的轴线开有直径为8mm的圆形通孔;两个果杯主体804大端面圆的距离为66mm,筒形突出部806的长度为9mm。
[0065]
外空心轴803为外径10mm,内径8mm的钢制空心轴,长度65mm,内轴为直径7mm的钢制实心轴,长度82mm,内轴两端套有长为16mm的m7外螺纹,其中每条m7外螺纹上均安装有两个安装锁紧螺母801,以防止内轴802向左右位移导致脱出,且需保证内轴802与外空心轴803 仅能发生同轴心相对滚动;
[0066]
内轴的两端面中央攻有深度10mm的m3内螺纹,紧固螺钉805在传动链轮上带孔安装直板 601外侧,安装好的带果杯主体804和锁紧螺母801的果杯轴在带孔安装直板601内侧,用紧固螺钉805穿过安装直板601上的孔与内轴802内螺纹连接并紧固,另一端同样紧固在与之对应的在另一条传动链条6的安装直板601上,螺钉紧固后保证果杯轴与传动链同步运动,果杯侧轮胀紧安装于外空心轴上,保证其与外空心轴803同步运动。
[0067]
如图5所示的摩擦板9上方的摩擦纹路为爬虫形状,摩擦板9通过四个7形支撑件1001安装于机架1上,摩擦板9与7形支撑件1001的横条板栓接,7形支撑件1001的竖条板与机架1栓接;7 形支撑件1001的横条板和竖条板上分别开有用于调整位置的长条孔;从而使得摩擦板9的安装高度与果杯主体804相切(摩擦接触),保证果杯在向前输送使并顺利滚动;
[0068]
在本实施例中,摩擦板9的板面长500mm,宽160mm,上表面与上层果杯下部贴合,在果杯随着传动链条6向前运动时在下方提供摩擦力,使其在摩擦板上滚动前进;四个7形支撑件 1001分别分布在摩擦板面的前后左右。
[0069]
如图5所示的侧挡板11包括:短板1102,长板1101和挡板支撑组件10,其中长板1101和短板1102为一块正板使用钣金成型,短板1102和长板1101间夹角为60
°
,短板1102的下方通过与挡板支撑组件10连接,短板1102接近旋转果杯8,用于防止意外颠簸导致的滚动苹果的滑落,从而避免卡死故障;在短板1102靠近弯折处开长方形槽口,从而允许光电箱9下方的支撑立柱 905穿过;挡板支撑组件10包括:两个v形支撑件1002和两个梯形支撑件1003,其中两个v形支撑件1002一前一后焊接在对应的7形支撑件1001上;梯形支撑件1003的外侧与短板1102的下侧焊接,梯形支撑件1003的斜面与长板1101内侧焊接,梯形支撑件1003斜面与外侧面呈60
°
夹角,与短板1102和长板1101的夹角保持一致,一个v形支撑件1002与所对应的梯形支撑件1003通过螺栓连接。
[0070]
如图6所示的品质检测光电箱采用机器视觉技术对苹果进行外观品质检测,光电箱9包括:支撑立柱905、暗箱901、两台相机904、相机安装夹具903和灯条902,其中暗箱901通过四根支撑立柱905支撑设置在档板11正上方,支撑立柱905焊接于机架1上从档板短板1102的槽口伸出,暗箱901采用不透光的黑色钢板制成,暗箱901的顶面设计为8边形的多面体,均使用一块平板包围,前面和后面分别朝向苹果的入料侧和出料侧,左面和右面为相机安装面;两台互成一定角度的相机904均通过调整相机夹具903安装在暗箱901的上方,两台相机904的视野中心线交点在苹果中心行进路线上;安装时,两台相机904的视野中心所处的平面垂直于链条传动方向,并使镜头尽量正对着暗箱901内摩擦板9正上方的中间位置。在暗箱901的顶部和前后侧面共设8 组灯条槽,用于安装灯条902,为检测提供稳定均匀的光源。
[0071]
在本实施例中,位于暗箱901的前后面的平板下沿在旋转果杯8经过的处开有
120mm宽, 20mm高的开口槽,利于大尺寸苹果顺利进入光电检测箱9,位于暗箱901的两侧面的平板距离暗箱顶面140mm处开有用于定位相机安装夹具903的安装长条孔,各接缝处均用胶条密封以防止漏光。
[0072]
如图7所示的落料装置包括:落料槽15、安装横板16和安装支架组件17,其中落料槽15为收口簸箕状,其内部底面及侧壁均铺上背胶的食品级发泡硅胶,用于缓冲落下的类球形果蔬,防止落料时对类球形果蔬造成磕碰损伤,安装横板16焊接于落料槽15入口底端,安装横板16 两端开孔与安装支架组件17连接;其中安装支架组件17包括:长条横板1703,y形支撑件1702 和角度调节板1701,长条横板1703固定在机架1的桌面上,y形支撑件1702的下端与长条横板 1703固接,y形支撑件1702竖直向上,上方的两只叉角均开孔,角度调节板1701与设置于其内侧的安装横板16固接,角度调节板1701的中间顶端开有一小孔用于与y形支撑件1702一只叉角固定,中间尾端开有一弧形长孔,用于与另一只叉角固定,可通过调节叉角与弧形长孔固定相对位置来调节落料装置的倾斜角度。
[0073]
工作时,电机2通过同步带3个主动轴5带动两组传动链条6同时旋转,;旋转输送装置中的旋转果杯8在旋转至层方后,一个苹果(由喂料机构或手动)从入料侧放置于两旋转果杯 8之间,随后旋转果杯8行驶至摩擦板9区域并在同摩擦板9的摩擦下转动,从而带动苹果转动;旋转的苹果输送经过光电箱12中,由进行相机904进行品质检测并同时采用分析方法进行分析,最后经落料装置落料。
[0074]
用于检测苹果的大小、红度和表面缺陷种类三种外部品质的分析方法为:
[0075]
在步骤1之前,先获取完整的图像,具体为:
[0076]
将苹果放在旋转输送装置首端的旋转果杯上,苹果和果杯随着链轮链条传动向前传动到摩擦板段,果杯由于生成的摩擦力产生力矩开始旋转,带动苹果自转,在摩擦板段苹果约能转动 1-2周,当完整苹果出现在相机视野内时软件触发两台相机开始获取图像,相机按照30帧每秒的速度拍摄苹果图像直至在视野内的苹果不再完整,相机停止获取图像;每个相机均采集到一组图像;两个相机获取的单个图像如图12所示。
[0077]
步骤1、计算当前苹果的平均半径;
[0078]
获得苹果的完整表面面积不变展开图原理为:如图8和图9所示,在苹果空间上,点a、 b、c、d、e、x和o均为空间中固定点,不会随着单个苹果自身的旋转而改变位置,图中x 点为相机的成像器件的视野中心点,o点为苹果中心点,相机视野中心点与苹果中心点的垂直距离为h,相机视野中心点与苹果中心点的水平距离为l,
[0079]
点c是相机视野中心点与苹果中心点的连线xo和苹果表面交点,即相机视野方向为图中xc所在直线方向并指向苹果中心o,点a是相机能拍摄到的苹果的上方最远端,点b是旋转苹果表面的最高点,点d是旋转苹果旋转轴上的表面点,点e是相机能拍摄到的苹果下方最下端;co为相机视野方向,do为苹果旋转轴所在直线,co与旋转轴do的夹角为θ, ae垂直于co,bo垂直于do。
[0080]
相机相对于苹果的视场角为∠axe,xc为视场中心线,苹果时刻在旋转果杯上沿着od转动,苹果表面经过这些空间定点的点也在时刻变化,获取的图像即为定格的某一时刻(如图12所示),所以每张获取的图像的中点为定格时刻苹果表面上与c点重合的点设为c1(另一相机设为 c2,后方以一相机为核心阐述原理),故所述获得苹果的完整表面面积不变展开图方法的思想为,以左相机分析,获取的图像以中心点c1截取一定宽度,该宽度为相机
获取两张图像间隔时长中苹果经过b点的宽度,将截取的长条图像拼接为一张大图,再按照苹果类球形特点,计算出苹果赤道面(上下宽度为一帧)周长,以大图中心为中心将大图截取为长为苹果的周长,此时图像上包含了苹果左半边加旋转一周苹果上经过的区域,由于苹果表面为曲面,故相机在获取两帧间隔时间中,苹果上经过旋转轴顶点d的点不会改变,而苹果上经过位置的区域,由于旋转半径即到od的距离逐渐变长,所以宽度逐渐变大,经过空间中固定b点的宽度最大,所以每张图像截取的长条图像宽度为最大宽度时,只有经过b点的苹果区域宽度正确,其他点均有重复截取,所以截取的长条拼接起来即所有时刻经过空间中相同点的宽度累积起来,即为拼接的展开图像的行坐标对应空间中的固定点,设b对应的行为b1所在的行(另一相机为b2),其他点类似,此时每一个行对应的长度都为苹果的周长;
[0081]
具体计算方法为:以单相机为例,首先由电机的转速计算出旋转传输装置的速度(本实施例中为匀速),即滚轮的线速度,即苹果的线速度v,由d=v/f计算某个相机获取相邻两张图像时间中苹果旋转经过空间最高点b点的宽度,图9所示,其中f为相机拍摄的帧速;
[0082]
然后从某个相机的一组图像中全部照片进行处理预裁剪,并获得所有的单独相片轮廓中,计算当前苹果的平均半径其中(xc,yc)为中心点c的坐标, (xn,yn)为苹果轮廓线的坐标。
[0083]
步骤2、两个相机所采集到的两组图像均进行裁剪,然后合并全部裁剪图片形成全宽大图;
[0084]
对两个相机的一组图像中全部照片中每张图像以为c1(另一相机设c2)为中点,裁剪宽度为d的区域进行裁剪;
[0085]
将所有裁剪下来的区域进行拼接为一张完整的大图,取拼接的大图中心,以此为中心,以苹果周长l=2πr为截取长度,截取拼接好的全宽大图,如图10所示的全宽大图为两相机角度拍摄的苹果转一周的展开图;图中,点c1是某一相机视野中心点与苹果中心点的连线和苹果表面交点,点a1是该相机能拍摄到的苹果的上方最远端,点b1是旋转苹果表面的最高点,点 d1是旋转苹果旋转轴上的表面点,点e1是该相机能拍摄到的苹果下方最下端。同理,点c2是另一相机视野中心点与苹果中心点的连线和苹果表面交点,点a1是该相机能拍摄到的苹果的上方最远端,点b1是旋转苹果表面的最高点,点d1是旋转苹果旋转轴上的表面点,点e1是该相机能拍摄到的苹果下方最下端(图12、图15和图16中的标记含义相同)。
[0086]
步骤3、计算两张全宽大图中各横行的理论长度,并按比例缩放进行长度调整;
[0087]
除了b1或b2点所在的行的长度正确外其余行均存在重复,所以为保证苹果展开的面积不变,计算出每行(本实施例中以一像素为一行)图像的理论长度;并根据长度缩放系数对每行图像进行缩放;原理为:由于苹果的外观可以近似成球形,展开图中的每行像素都反映了苹果表面上垂直于旋转轴的一个环形区域图像,如图11和图13所示,苹果表面的环形区域经过旋转拍摄后在展开图上即为一定宽度的一行像素;且球形的外表面不同位置的细环可看作球体中垂直于旋转轴不同位置的切面圆的圆环,故圆环周长ch计算公式为:
[0088][0089]
式中,θ为该圆环上点与球心连线和旋转轴的夹角、r为当前苹果的平均半径、r为
圆环半径、ch为圆环周长,由公式可知,环周长从苹果左右两极点向中心以正弦规律增加,并在苹果赤道面达到最大,由于展开图中每行像素的长度反映了苹果样品垂直于旋转轴的切面圆周长,因此行长度也应按照正弦规律变化,从两极点向赤道面增大,这与前述投影方式中能够保证面积不变的桑逊投影图各经线均为正弦规律变化的特性一致,将展开图上的每行像素的长度按照该行所在的苹果表面切面圆周长的长度进行变换后,可得到图像表现的面积比例与真实值相同的一行像素,推广到所有像素行即可得到各处面积比例与球体表面真实面积比例相同的全表面展开图。
[0090]
基于以上原理,计算时先将像素行所在苹果表面圆环的周长视为该行的理论长度,苹果样品进行检测时旋转经过图像采集区域,通过暗箱侧面倾斜安装的相机获取图像,相机安装位置与角度的改变将影响图像中苹果样品的角度,也将直接影响每行像素的理论长度,结合图像获取方式和相机方位,通过将苹果表面上每一像素的实际位置转变为在展开图中的图像坐标,完成对所有像素行理论长度的计算。
[0091]
因此对各行理论长度的计算具体为:
[0092]
如图13所示,球体的苹果表面上的像素任意点m,与相机视野中心点c的实际距离为 mm2,与苹果旋转轴的实际距离为mm1,由于外表面展开图以c点所在环形区域为图像中心行,则在展开图中m点与c点之间的像素距离y
mc
即反映了真实的mc两点间垂直距离,根据y
mc
的大小,结合相机的焦距f、相机与样品间的距离即可计算得到球体苹果表面上的像素任意点 m与co的真实距离mm2,具体计算为:
[0093][0094]
式中,h为相机与苹果的垂直距离、l为相机与苹果的水平距离、d为相机与样品间距、 f为相机焦距、y
mc
为图像中的像素行数。
[0095]
已知mm2,过m点做垂直于旋转轴的切面圆,切面圆以mm1为半径,切面圆周长即为展开图上m点所在行的理论长度c
th
。当m点位于样品上不同区域时,与直线co的垂直距离和方向均不同,如图13所示;
[0096]
如图14所示,根据点m所在的不同位置,计算mm1时的公式也有不同,依照平面几何原理,结合已得到的苹果样品半径,可计算得到切面圆的周长作为该行图像的理论长度,具体计算公式为:
[0097]cth
=2
×
π
×
mm1[0098]
其中:
[0099][0100]
[0101]
式中,r
t
为样品轮廓半径,β为co与do夹角,α为mo与co夹角,l为m点到旋转轴od的距离,h为m点到视野中心oc的距离。
[0102]
由于苹果旋转过程中最远离旋转轴的点所在切面圆半径最大,即为苹果半径,故此时切面圆周长即为苹果周长,即矩形的拼接展开图的长度,进行投影变换该行的理论长度最大,为 c
max
。
[0103]
根据展开图上每一行图像的坐标,通过上述计算得到该行图像在苹果表面上的实际位置以及该行图像的理论长度c
th
,并将该理论长度与最大理论长度作比,该比值为展开图上该行图像的长度缩放系数n,将缩放系数乘以展开图上该行像素长度即为该行像素经过投影变换后应当达到的理论像素行长度w
p
,具体计算为:
[0104][0105]
式中,c
th
为该行图像理论长度、c
max
为苹果周长、n为缩放系数、w为该行图像原始像素数、w
p
该行图像理论像素数。
[0106]
步骤3、对变换长度后的两组图像均进行双相机重复区域和单相机重复区域的裁剪,如图 15所示;
[0107]
在苹果旋转一周经过的对应苹果上的区域旋转到d点上方时会再次被拍到并截取拼接,故在桑逊投影图中将重复该片区域在d点下方的投影删去,即投影图上的d1(另一相机为d2);同理右相机获取的所有图像也同样处理,但由于两相机会有重复拍摄区域,故设定以最高点b 点为分界点,即投影图上的b1(另一相机为b2)行为界;
[0108]
步骤4、合并两组图像生成苹果表面展开图,如图16所示;
[0109]
步骤5、对苹果表面展开图进一步进行颜色提取,分别计算提取的红色区域的像素面积和完整展开图的像素面积,计算红色区域面积占表面展开图总面积比,利用深度学习建立苹果完整面积不变展开图上表面缺陷种类判断模型,进行大小、红度和表面缺陷种类三种外部品质的分析,最后对待检测苹果进行表面缺陷种类进行预测,将检测结果显示在电脑的显示界面上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1