一种基于环境适应算法的时差微震震源定位方法
1.本发明提供一种基于环境适应算法的时差微震震源定位方法,属于微震定位技术领域。
背景技术:
2.微震定位指根据检波器接收到的微地震信号,推演出微地震发生位置的一种地球物理方法,在岩土工程中被广泛应用。微震定位的精度和效率与煤矿资源开采的高效性与安全性息息相关。
3.微震定位算法分为类偏移定位算法和时差定位算法,前者计算效率低所以国内外往往采用时差定位方法。时差定位方法起源于geiger于1912年提出的经典定位算法,其基本思想是将非线性方程组线性化并给出最小二乘解,但该算法受初始值影响较大。随着多学科的交流渗透,遗传算法、差分进化算法、微粒群优化算法等智能计算方法得到了迅速发展,基于此,国内外学者做了广泛研究以提高微震定位的精度和稳定性。例如,粒子群差分进化定位算法(depso)、震源扫描算法(ssa)、网格搜索-牛顿迭代法、mopso-sa混合算法、基于斯奈尔定律的布谷鸟算法等,这些较为新颖的方法进一步提高了微震定位的精度与稳定性,但同时也有着各自的缺陷。采用depso与单纯用粒子群算法进行微震定位相比,定位精度有着一定提升,但在采集信号信噪比极低时其定位精度仍然会受影响;ssa和网格搜索法有着更长的定位耗时;mopso-sa有效避免了寻优过程陷入局部极值的问题,但由于受微震信号检测通道个数影响,定位性能依然需要进一步优化。
4.另外还有改进定位目标函数的差分进化微震定位方法(de),基于传统微震p波走时定位方法,在定位目标函数中加入了误差加权系数,通过降低初至拾取精度低的微震信号道对定位误差的影响,减弱了初至拾取精度对微震定位的影响;利用差分进化算法,通过种群初始化、变异、交叉和选择等操作,求解改进的微震定位目标函数,实现微震定位。但是该方法在种群规模小的情况下,收敛速度慢且稳定性差。
技术实现要素:
5.针对上述技术问题,本发明提供一种基于环境适应算法的时差微震震源定位方法(ieam-r),达到以下两个目的:
6.(1)基于ieam-r提出一种所需种群规模更小的方法,减小反演过程的计算量,使整个流程更高效;
7.(2)加速反演算法的收敛过程,并进一步提高定位结果的准确性与稳定性。
8.本发明的方案为:
9.一种基于环境适应算法的时差微震震源定位方法,包括以下步骤:
10.(1)在微震震源待测地点的不同位置设置多个检波器,当微震事件发生时,产生的微震信号被检波器接收并传送给计算机;
11.(2)对监测得到的微震信号进行去噪处理,通过波形相关或其他检测算法提取有
效微震事件,剔除无效微震事件;
12.(3)利用时窗比法与aic结合方法进行初至到时拾取;
13.(4)构造下述目标函数,计算拾取到时与计算到时的时差,利用最优化思想求解微震震源位置:
[0014][0015][0016]di
=|e
i-e
med
|
ꢀꢀ
(3)
[0017][0018]
式中,(x0,y0,z0)为震源坐标,t0为发震时刻,n为检波器个数,ri为各道误差加权系数,t
ical
表示第i个检波器的模拟波至时间,t
iobs
表示第i个检波器的观测波至时间,ei表示第i个检波器的计算误差,e
med
表示第i个检波器的误差中值;
[0019]
(5)初始化ieam-r的参数,包括种群规模popsize、最大迭代次数mit,搜索空间范围[lb,ub]3;
[0020]
(6)产生初始种群oldpop,在搜索空间中随机生成每个个体位置坐标,并通过公式(1)计算每个个体的适应度值;种群中,每个个体的位置坐标构成一个震源位置的解(x0’
,y0’
,z0’
),其适应度值用来评估与实际震源位置的接近程度,适应度值越小,则与实际震源位置越接近;
[0021]
(7)计算当前种群的平均适应度值f
avg
;所有个体按适应度值大小升序排序后,设置序号index来将种群分为适应度优于f
avg
的部分和劣于f
avg
的部分;
[0022]
(8)从适应度优于f
avg
的个体中随机选择个体i1,从适应度劣于f
avg
的个体中随机选择个体i2;
[0023]
(9)用i1与i2的差值定义带宽bw;
[0024]
(10)生成临时种群temppop,其中每个个体的位置坐标通过以下公式产生;从而使i1中的个体开发更优的潜在解,i2中的个体探索新的搜索空间;
[0025]
temppop(i)=oldpop(i)+bw*randi=1,2,...,index
ꢀꢀ
(5)
[0026]
temppop(j)=(fj/f
index
)*oldpop(j)+rand j=index,index+1,...,popsize
ꢀꢀ
(6)
[0027]
其中,temppop(i)表示临时种群中的第i个体,oldpop(i)表示当前种群中第i个体,rand是(0,1)内的随机数;
[0028]
(11)对temppop中超出搜索空间的个体进行越界处理;
[0029]
(12)通过式(1)计算temppop中所有个体的适应度值;
[0030]
(13)将temppop与oldpop合并,保留适应度更优的popsize个个体作为新的oldpop;
[0031]
(14)判断是否满足终止条件;满足则输出当前oldpop中最优个体的位置,即反演得到的震源坐标;否则重复步骤(7)-(14)。
[0032]
本发明首次将环境适应算法ieam-r应用于微震震源定位问题,取得了比已有的差分进化算法更好的效果。
附图说明
[0033]
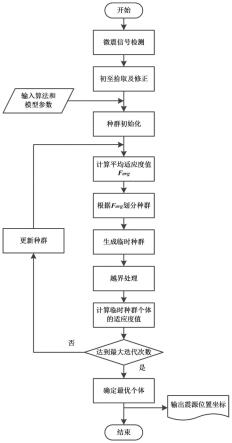
图1为本发明所述方法流程图;
[0034]
图2为实施例的ieam-r与de的进化曲线;
[0035]
图3为实施例的ieam-r与de定位结果。
具体实施方式
[0036]
由于井下监测的检波器基本在目标层深度附近,且在储层附近地层分层比较明显,因此层状速度模型比较适用于井下监测。下面结合附图和具体实施例进一步说明本发明的技术方案。
[0037]
如图1所示的流程,包括以下步骤:
[0038]
首先,采用地面稀疏观测建立五层的水平层状速度模型,在地面放置埋深1m的检波器十组,横向坐标依次为20m、50m、80m、110m、150m、180m、220m、260m、290m、320m。为验证本发明的有效性,选取已知的震源位置(220.00,1700.00)作为研究对象,并于已有的差分进化微震定位算法(de)进行对比。算法的种群规模为15。最大迭代次数为50。
[0039]
由图2可知,在迭代10次后,本发明所述方法ieam-r的收敛速度显著快于de,并保持着稳定的下降趋势。可见对于此实例,ieam-r的寻优能力更强,能根据给定的初始参数范围自动逼近真值。
[0040]
表1 ieam-r与de的10次运行结果
[0041][0042]
由表1可知,本发明所述方法ieam-r十次运行得到的x、z坐标标准差分别为0.01,
0.00,de得到的x、z坐标标准差20.88、1.41,可见在相同的种群规模下本发明所述方法ieam-r在x、z方向上的平均误差更小。
[0043]
为了更直观的对比两种算法的定位效果,图3显示了剖面图,容易看出本发明所述方法ieam-r的准确性与稳定性更高。
[0044]
以上实施例说明,应用本发明所述算法求解震源定位参数及发震时刻较传统差分进化方法更为优越,算法具有收敛速度快、定位精度高、稳定性强、初始参数设置容易的优点。这是因为ieam-r算法在迭代过程中,适应算子根据不同个体的适应度值分别应用受控适应和非受控适应两种策略,受控适应会使个体在其周围有限区域继续开发最优解,非受控适应会使得个体随机探索搜索空间中的新区域,使搜索过程更加高效,从而最终获得更准确和稳定的定位结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1