一种机场中基于雷达成像标校FOD探测器零位的方法与流程
一种机场中基于雷达成像标校fod探测器零位的方法
技术领域
1.本发明涉及机场安全监测技术领域,具体涉及机场中基于雷达成像标校fod探测器零位的方法。
背景技术:
2.边灯式机场跑道外来物探测器(以下简称fod探测器)是用于辅助或代替人工巡查的方法对机场跑道出现的外来物进行全自动、全天时、全天候的探测设备。探测器对称安装于跑道两侧的边灯正前方,通过雷达和视频传感器对跑道上随机出现的外来物进行及时发现、定位和通报,大大提高了对道面外来物的检测效率,有效保障了飞行器的安全起降。
3.由于探测器的架设高度低矮,典型高度为350mm-420mm之间。单台探测器覆盖的探测半径约为70m。以一条3800m长度的跑道为例,要实现跑道的全覆盖探测,需要部署约120台探测器。而每台探测器工作时需要在0-180
°
的范围内往复进行扫描探测,因此在安装时需要对每台探测器进行零位标校,以保证每台探测器的扫描范围一致性。机场跑道中探测器部署示意图如图1所示。探测器通过内部的雷达传感器持续地对跑道道面进行扫描,将探测到的外来物的距离和角度信息转换为机场专用的ph坐标或是gps坐标,从而实现目标的精准定位。而雷达获取外来物角度信息则是通过读取发现外来物时的当前转台角度来实现。因此探测器准确零位标校不仅能够保证探测器的探测范围一致性,并且通过信息转换后能够获取更精准的外来物定位。每台探测器在出厂前都需要进行零位设置,但探测器在安装在跑道道面后,受安装角度误差的影响,实际安装后的零位与跑道水平方向会有偏差,这就会导致零位出现误差影响探测范围的一致性和目标定位的准确度。
4.另外在跑道的联络道位置安装的探测器还要负责联络道区域的探测,由于联络道位置一般为非规则设计,因此也需要一种专门针对联络道安装的探测设备的零位标校方法。探测器在联络道的安装位置如图2所示。现有的边灯式机场跑道外来物探测器安装时的零位标校主要还是通过人工目视法实现。目视法是指在探测器安装通过时肉眼来判断探测器的零位指向,将探测器的零位大致与跑道边线平行,再通过反复调整底盘的安装角度使探测器的零位指向跑道水平方向。目视标校法虽然快捷,但标校精度差且多台探测器之间的零位不一致,零位偏差普遍在-5-5
°
之间。因此导致多台探测器的探测范围不一致,存在检测盲区且对外来物的定位上会出现较大的误差。因此如何改善标校的灵活性和实用性,能够满足机场跑道外来探测器的标校精度要求是亟待解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种机场中基于雷达成像标校fod探测器零位的方法,能够满足机场跑道外来探测器的标校精度要求,包括:
6.步骤1,根据机场道路类型安装设置探测器,并相应选择参考点;
7.步骤2,设置扫描参数,控制探测雷达进行勘场扫描;获取所述机场道路的一维距离像,通过网络上传至上位机;
8.步骤3,所述上位机根据所述机场道路的一维距离像,标注所述参考点的位置;
9.步骤4,通过探测器运转所述实际零位偏差值,完成所述探测器的零位校正。
10.特别地,当所述机场道路类型为跑道时,通过目视法将探测器固定在与跑道边线水平方向;在跑道两侧对称安装所述探测器,一侧跑道的探测器选择以另一侧跑道的探测器作为参考点。
11.特别地,当所述机场道路类型为联络道时,通过目视法将探测器零度位置朝向同侧边灯角度,选择以同侧的跑道边灯作为参考点。
12.特别地,设置扫描参数,控制探测雷达进行勘场扫描包括:配置扫描参数为0-180
°
进行正反向勘场扫描。
13.特别地,当道路类型为跑道时,标注对向探测器位置包括:将雷达采集的正向一维距离像进行解析,使用标注工具将对向探测器的回波功率最大值标出,获取方位角度。
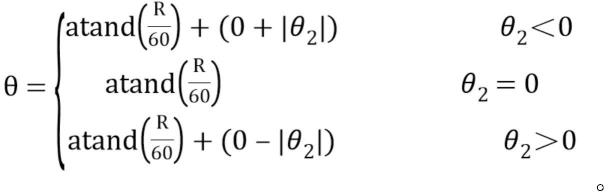
14.特别地,探测器的实际零位为θ,对向探测器的实际安装角度为90
°
;将正反向扫描的对向探测器的角度值取平均后记为θ
1。
则角度偏差θ2=90-θ1;
15.当θ2<0时,探测器的零位角度偏左;当θ2>0时,探测器零位角度偏右;θ2=0则表示探测器零位角度无偏差,则有:
[0016][0017]
特别地,当道路类型为联络道时,解析获取的雷达一维距离像,根据方位角度,距离和回波功率标注所述同侧的跑道边灯。
[0018]
特别地,获取所述探测器的实际零位偏差值包括:
[0019]
探测器的实际零位为θ,参照的同侧跑道边灯为0
°
,将正反向扫描的同侧跑道边灯的角度值取平均后记为θ1。则角度偏差θ2=0
–
θ1;
[0020]
当θ2<0时,探测器的零位角度偏左;当θ1>0时,探测器零位角度偏右;θ2=0则表示探测器零位角度无偏差;由于探测器安装在边灯正前方,两者距离记为r,因此实际零位θ为:
[0021][0022]
特别地,所述步骤4具体包括:
[0023]
控制探测器运转θ位置,通过上位机将此角度设置为零度完成探测器的零位标校工作。
[0024]
有益效果:
[0025]
1)通过本发明可以有效的解决目视标校法对探测精度的影响,并极大的改善的标校的灵活性和实用性;标校测量误差在0.4
°
以内,能够满足机场跑道外来探测器的标校精度要求;
[0026]
2)本发明可使用于各种机场道路类型,跑道和联络道都可以使用;
[0027]
3)本发明通过解析获取的雷达一维距离像,根据方位角度,距离和回波功率标注所述同侧的跑道边灯或对侧的探测器,准确性好,适用性广;
[0028]
4)本发明中可设置扫描参数,控制探测雷达进行勘场扫描,灵活性高,适用场景多;
[0029]
5)本发明中可适用多种场景计算探测器的实际零位,获知不同的角度偏移;
[0030]
6)本发明中控制探测器运转θ位置,通过上位机将此角度设置为零度完成探测器的零位标校工作,可靠性高,操作简单。
附图说明
[0031]
图1为本发明中机场跑道中探测器安装部署示意图;
[0032]
图2为本发明中机场联络道中探测器安装部署示意图;
[0033]
图3为本发明中扫描的对称探测器一维距离像的示意图;
[0034]
图4为本发明中跑道标注对向探测器的角度的示意图;
[0035]
图5为本发明中标注对向探测器偏差方向的角度示意图;
[0036]
图6为本发明中联络道安装探测器的边灯参照的示意图;
[0037]
图7为本发明中扫描的同侧边灯的一维距离像的示意图;
[0038]
图8为本发明中联络道标注同侧边灯的角度的示意图;
具体实施方式
[0039]
下面结合附图并举实施例,对本发明进行详细描述。
[0040]
本发明提供了一种机场中基于雷达成像标注探测器零位的方法,在探测器目视安装完成后,再次通过雷达成像选取参照角度进行零位校准,本说明给出了实现的原理,用于校正探测器安装时的零位误差,能够极大的提高探测器安装零位的精度,满足探测器标校的精度要求。具体实施方法如下:
[0041]
实施例1:跑道两侧对称安装的探测器标校方法
[0042]
步骤1,根据机场道路类型安装设置探测器,并相应选择参考点;
[0043]
本实施例中机场道路类型为跑道,首先通过目视法将探测器的零位大致与跑道边线水平,然后将底盘固定,此时探测器的零位大致与跑道边线水平;在跑道两侧对称安装探测器,选择对侧的探测器作为参考点。
[0044]
步骤2,探测雷达进行勘场扫描
[0045]
探测器安装完成后,扫描场景因此已经固定。由于探测器都是对称安装于跑道,并且安装位置是通过通用测量方法进行过测量;
[0046]
因此理论认为跑道两侧对称架设的两台探测器互在彼此的正90
°
。此时配置扫描参数为0-180
°
进行正反向勘场扫描。当前跑道场景的一维距离像会通过网络回传给上位机软件,扫描的一维距离像用于标注对称探测器的位置,如图3所示。
[0047]
步骤3,所述上位机根据所述机场道路的一维距离像,标注所述参考点的位置。
[0048]
将雷达采集的正向一维距离像进行解析,使用标注工具将对向探测器的回波功率最大值标出,获取方位角度。如图4所示,其中x轴表示方位角度(单位:
°
),y轴表示距离(单
位:m),z轴表示场景回波功率(单位:dbm)。以图4为例,”x 88.17
°”
是测量的对向探测器的角度值。使用相同方法将雷达的反向一维距离像中的对向探测器的角度值标出。
[0049]
步骤4,通过探测器运转所述实际零位偏差值,完成所述探测器的零位校正;
[0050]
探测器的实际零位为θ,对向探测器的实际安装角度为90
°
;将正反向扫描的对向探测器的角度值取平均后记为θ
1。
则角度偏差θ2=90-θ1。
[0051]
当θ2<0时,探测器的零位角度偏左;当θ2>0时,探测器零位角度偏右;θ2=0则表示探测器零位角度无偏差。则有:
[0052][0053]
偏差如图5所示。
[0054]
随后,控制探测器运转θ位置,通过上位机将此角度设置为零度完成探测器的零位标校工作。
[0055]
实施例2:联络道安装的探测器零位标校方法
[0056]
步骤1,根据机场道路类型安装设置探测器,并相应选择参考点;
[0057]
本实施例中机场道路类型为联络道,
[0058]
通过目视法将探测器零度位置朝向同侧60m边灯角度,安装方法首先通过目视法将探测器的零位大致与联络道边线水平,然后将底盘固定,此时探测器的零位大致与联络道边线水平;由于联络道安装的探测器没有对称参考的探测器,因此将同侧60m位置的跑道边灯(边灯典型安装距离为60m)作为参考点。如图6所示。
[0059]
步骤2,探测雷达进行勘场扫描
[0060]
勘场扫描方法同2、2);获取勘场扫描的一维距离像如图7所示。
[0061]
此时配置扫描参数为0-180
°
进行正反向勘场扫描。当前联络道场景的一维距离像会通过网络回传给上位机软件,扫描的一维距离像用于标注同侧边灯的位置,如图7所示。
[0062]
步骤3,所述上位机根据所述机场道路的一维距离像,标注所述参考点即同侧边灯的位置
[0063]
解析获取的雷达一维距离像,其中x轴表示方位角度(单位:
°
),y轴表示距离(单位:m),z轴表示场景回波功率(单位:dbm)。如图8所示。
[0064]
步骤4,通过探测器运转所述实际零位偏差值,完成所述探测器的零位校正;
[0065]
探测器的实际零位为θ,参照的同侧跑道边灯为0
°
,将正反向扫描的同侧跑道边灯的角度值取平均后记为θ
1。
则角度偏差θ2=0
–
θ1。
[0066]
当θ2<0时,探测器的零位角度偏左;当θ1>0时,探测器零位角度偏右;θ2=0则表示探测器零位角度无偏差。由于探测器安装在边灯正前方,两者距离记为r,因此实际零位θ为:
[0067][0068]
控制探测器运转θ位置,通过上位机将此角度设置为零度完成探测器的零位标校工作。
[0069]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
[0070]
对于本领域技术人员而言,显然本发明实施例不限于上述示范性实施例的细节,而且在不背离本发明实施例的精神或基本特征的情况下,能够以其他的具体形式实现本发明实施例。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明实施例的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本发明实施例内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。此外,显然“包括”一词不排除其他单元或步骤,单数不排除复数。系统、装置或终端权利要求中陈述的多个单元、模块或装置也可以由同一个单元、模块或装置通过软件或者硬件来实现。第一,第二等词语用来表示名称,而并不表示任何特定的顺序。
[0071]
最后应说明的是,以上实施方式仅用以说明本发明实施例的技术方案而非限制,尽管参照以上较佳实施方式对本发明实施例进行了详细说明,本领域的普通技术人员应当理解,可以对本发明实施例的技术方案进行修改或等同替换都不应脱离本发明实施例的技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1