激光干涉仪的制作方法
1.本发明涉及激光干涉仪。
背景技术:
2.在专利文献1中公开了一种光多普勒测速仪,当从光源对被测定对象照射了光束时,利用从被测定对象反射的反射光束中产生的多普勒效应来计测被测定对象的速度。
3.具体而言,在专利文献1记载的光多普勒测速仪中,首先,对被测定对象照射从光源射出的光源光束,得到测定光束,并通过光调制器对光源光束进行调制,得到参照光束。对光调制器供给相位调制信号。在光调制器中,通过该相位调制信号对光源光束进行相位调制。
4.接着,通过光检测器来检测包括测定光束和参照光束的合成光,得到具有相位调制信号所对应的频率调制分量的光检测信号。接着,通过两个导频信号对所得到的光检测信号进行am解调,然后进行fm解调。由此,求出被测定对象的速度。
5.在这样的光多普勒测速仪中,使相位调制信号及两个导频信号与从晶体振荡器输出的正弦波信号同步。由此,能够使相位调制信号和从光检测器得到的光检测信号中的相位一致。其结果是,能够将fm解调后的解调信号所包括的失真分量抑制得较小,可以进行高精度的速度计测。
6.专利文献1:日本特开平07-151772号公报
7.在专利文献1记载的光多普勒测速仪中,使用了晶体振荡器作为基准信号的发生源。晶体振荡器具有晶体振子以及驱动晶体振子的电路。作为驱动晶体振荡器的电路,例如可以列举出包括逆变器的振荡电路。这样的振荡电路由于电路构成比较简单,因此,具有容易实现小型化的优点。另一方面,在使用振荡电路的情况下,从振荡电路取出的电压信号的相位被振荡电路所包括的电容器的静电电容、电路的寄生电容等左右。电容器的静电电容、电路的寄生电容等根据周围的温度等、环境而发生变化,因此,从振荡电路取出的电压信号的相位也发生变化。由此,作为使前述的相位调制信号、两个导频信号同步的基准的正弦波信号的相位也发生变化。其结果是,存在难以精度优良地使光检测信号的相位与相位调制信号的相位一致、被测定对象的速度的计测精度降低的技术问题。
技术实现要素:
8.本发明的应用例所涉及的激光干涉仪,其特征在于,具备:
9.激光光源,射出第一激光;
10.光调制器,具备振动元件,并使用所述振动元件对所述第一激光进行调制,生成包括调制信号的第二激光;
11.受光元件,接收第三激光以及所述第二激光,并输出受光信号,所述第三激光包括所述第一激光被测定对象物反射所生成的采样信号;以及
12.运算部,基于基准信号,从所述受光信号求出所述测定对象物的位移,
13.所述运算部具有:
14.前处理部,进行从所述受光信号提取频率调制分量的前处理,并输出前处理信号;
15.解调处理部,将正交信号混合于所述前处理信号而得到混合信号之后,进行从所述混合信号取出所述采样信号的解调处理;以及
16.正交信号生成部,基于所述基准信号的相位及所述前处理信号的振幅或者基于所述基准信号的相位及所述混合信号的振幅而生成所述正交信号。
附图说明
17.图1是示出第一实施方式所涉及的激光干涉仪的功能框图。
18.图2是示出图1所示的传感器头部的简要构成图。
19.图3是示出图2所示的光调制器的第一构成例的立体图。
20.图4是示出光调制器的第二构成例的一部分的俯视图。
21.图5是示出光调制器的第三构成例的俯视图。
22.图6是说明从垂直于振动元件的表面的方向射入入射光ki时产生多个衍射光的概念图。
23.图7是说明构成为入射光ki的前进方向与参照光l2的前进方向所成的角度为180
°
的光调制器的概念图。
24.图8是说明构成为入射光ki的前进方向与参照光l2的前进方向所成的角度为180
°
的光调制器的概念图。
25.图9是说明构成为入射光ki的前进方向与参照光l2的前进方向所成的角度为180
°
的光调制器的概念图。
26.图10是示出具有封装结构的光调制器的剖视图。
27.图11是示出单极逆变器振荡电路的构成的电路图。
28.图12是振动元件的lcr等效电路的例子。
29.图13是示出图1所示的相位量设定部设定相位量的方法的一个例子的流程图。
30.图14是示出进行基于图13所示的流程的激光干涉仪的校准之前的前处理信号s(t)、解调处理部进行解调后的相位信息(展开前的相位信息)以及信号输出部进行相位展开处理后的相位信息(展开后的相位信息)的波形的例子。
31.图15是示出进行基于图13所示的流程的激光干涉仪的校准之后的前处理信号s(t)、解调处理部进行解调后的相位信息(展开前的相位信息)以及信号输出部进行相位展开处理后的相位信息(展开后的相位信息)的波形的例子。
32.图16是示出第二实施方式所涉及的激光干涉仪的功能框图。
33.附图标记说明
[0034]1…
激光干涉仪,1a
…
激光干涉仪,2
…
激光光源,3
…
准直透镜,4
…
光分路器,6
…
1/2波长板,7
…
1/4波长板,8
…
1/4波长板,9
…
检偏振器,10
…
受光元件,12
…
光调制器,14
…
测定对象物,16
…
设置部,18
…
光路,20
…
光路,22
…
光路,24
…
光路,30
…
振动元件,30a
…
振动元件,30b
…
振动元件,31
…
基板,32
…
槽,33
…
垫片,34
…
衍射光栅,35
…
垫片,36
…
振动方向,37
…
反射镜,45
…
电路元件,50
…
光学系统,51
…
传感器头部,52
…
运算部,53
…
前处理部,54
…
振荡电路,55
…
解调处理部,55a
…
解调处理部,57
…
正交信号生成部,
57a
…
正交信号生成部,70
…
容器,72
…
容器主体,74
…
盖,76
…
接合线,120
…
光调制振子,301
…
第一电极,302
…
第二电极,303
…
衍射光栅载置部,305
…
压电基板,306
…
梳齿状电极,307
…
接地电极,311
…
正面,312
…
背面,531
…
电流电压转换器,532
…
adc,533
…
adc,534
…
第一带通滤波器,535
…
第二带通滤波器,536
…
第一延迟调整器,538
…
乘法器,539
…
第三带通滤波器,540
…
第一agc部,541
…
第二agc部,542
…
加法器,551
…
乘法器,552
…
乘法器,553
…
反相放大器,555
…
第一低通滤波器,556
…
第二低通滤波器,557
…
除法器,558
…
反正切运算器,559
…
信号输出部,560
…
混合信号振幅运算器,571
…
第四带通滤波器,572
…
希尔伯特转换滤波器,573
…
第二延迟调整器,574
…
基准信号相位运算器,577
…
绝对值运算器,578
…
第三低通滤波器,579
…
相位量设定部,579a
…
相位量设定部,580
…
加法器,581
…
余弦运算器,582
…
正弦运算器,721
…
第一凹部,722
…
第二凹部,c0…
并联电容,c1…
串联电容,c3
…
第三电容器,cd
…
第二电容器,cg
…
第一电容器,cos(θm(t))
…
余弦波信号,gnd
…
gnd端子,k-2s
…
衍射光,k-1s
…
衍射光,k
0s
…
衍射光,k
1s
…
衍射光,k
2s
…
衍射光,ki…
入射光,l1
…
出射光,l1…
串联电感,l1a
…
第一分路光,l1b
…
第二分路光,l2
…
参照光,l3
…
物体光,n
…
法线,p
…
间距,r1…
等效串联电阻,rd
…
限制电阻,rf
…
反馈电阻,s(t)
…
前处理信号,s1
…
第一信号,s2
…
第二信号,s102
…
工序,s104
…
工序,s106
…
工序,s108
…
工序,s110
…
工序,s112
…
工序,s114
…
工序,s116
…
工序,s118
…
工序,s120
…
工序,sin(θm(t))
…
正弦波信号,sa
…
振幅信号,sd
…
驱动信号,ss
…
基准信号,vcc
…
端子,x1
…
端子,x2
…
端子,y
…
端子,i
…
信号i,jp1
…
分支部,jp2
…
分支部,ps1
…
第一信号路径,ps2
…
第二信号路径,r
…
信号r,x
…
信号x、y
…
信号y,β
…
射入角,θb…
闪耀角,θs…
倾斜角度。
具体实施方式
[0035]
下面,基于附图所示的实施方式对本发明的激光干涉仪进行详细说明。
[0036]
1.第一实施方式
[0037]
首先,对第一实施方式所涉及的激光干涉仪进行说明。
[0038]
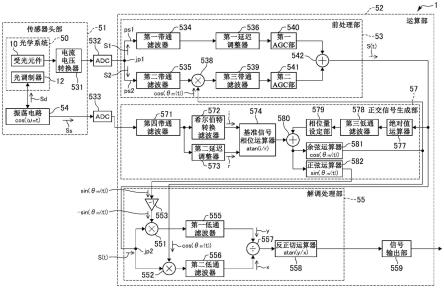
图1是示出第一实施方式所涉及的激光干涉仪的功能框图。
[0039]
图1所示的激光干涉仪1具有光学系统50、具备电流电压转换器531及振荡电路54的传感器头部51以及输入来自光学系统50的光检测信号的运算部52。
[0040]
1.1.传感器头部
[0041]
图2是示出图1所示的传感器头部51的简要构成图。
[0042]
1.1.1.光学系统
[0043]
如前所述,传感器头部51具备光学系统50。
[0044]
如图2所示,光学系统50具备激光光源2、准直透镜3、光分路器4、1/2波长板6、1/4波长板7、1/4波长板8、检偏振器9、受光元件10、移频器型的光调制器12以及配置有测定对象物14的设置部16。
[0045]
激光光源2射出出射光l1(第一激光)。受光元件10将接收到的光转换为电气信号。光调制器12具备振动元件30,使出射光l1的频率发生变化,而生成包括调制信号的参照光l2(第二激光)。设置部16根据需要进行设置即可,构成为能够配置测定对象物14。射入测定对象物14的出射光l1反射为物体光l3(第三激光),该物体光l3包括作为源自于测定对象物
14的多普勒信号的采样信号。
[0046]
将从激光光源2射出的出射光l1的光路设为光路18。在光路18上,从激光光源2侧开始依次配置有准直透镜3及1/2波长板6。光路18通过光分路器4上的反射而与光路20结合。在光路20上,从光分路器4侧开始依次配置有1/4波长板8及光调制器12。此外,光路18通过透过光分路器4而与光路22结合。在光路22上,从光分路器4侧开始依次配置有1/4波长板7及设置部16。
[0047]
光路20通过透过光分路器4而与光路24结合。在光路24上,从光分路器4侧开始依次配置有检偏振器9及受光元件10。
[0048]
从激光光源2射出的出射光l1被光分路器4一分为二,其中一个经过光路20而射入光调制器12。此外,另一个经过光路22而射入测定对象物14。利用光调制器12生成的参照光l2经过光路20及光路24而射入受光元件10。通过测定对象物14上的反射而生成的物体光l3经过光路22及光路24而射入受光元件10。
[0049]
需要指出,本说明书中的“光路”是指设定于光学部件之间的、光前进的路径。
[0050]
下面,进一步对光学系统50的各部进行说明。
[0051]
1.1.1.1.激光光源
[0052]
激光光源2是射出具有可干涉性的出射光l1的激光光源。激光光源2优选使用线宽为mhz频段以下的光源。具体而言,可以列举出he-ne激光器这样的气体激光器、dfb-ld(distributed feedback-laser diode:分布反馈型激光二极管)、fbg-ld(带fiber bragg grating的laser diode:带光纤布拉格光栅的激光二极管)、vcsel(vertical cavity surface emitting laser:垂直谐振腔面发射激光二极管)、fp-ld(fabry-perot laser diode:法布里-珀罗型半导体激光二极管)这样的半导体激光元件等。
[0053]
激光光源2特别优选为半导体激光元件。由此,可以使激光光源2特别小型化。因此,能够实现激光干涉仪1的小型化。特别是,可以实现激光干涉仪1中收纳光学系统50的传感器头部51的小型化及轻量化,因此,在提高激光干涉仪1的操作性这一点上也很有用。
[0054]
1.1.1.2.准直透镜
[0055]
准直透镜3是配置在激光光源2与光分路器4之间的凸透镜。准直透镜3使从激光光源2射出的出射光l1平行化。
[0056]
需要指出,在从激光光源2射出的出射光l1充分地平行化的情况下,例如当将he-ne激光器这样的气体激光器用作激光光源2时,也可以省略准直透镜3。
[0057]
另一方面,在激光光源2为半导体激光元件的情况下,优选激光干涉仪1具备配置在激光光源2与光分路器4之间的准直透镜3。由此,能够使从半导体激光元件射出的出射光l1平行化。其结果是,出射光l1成为准直光,因此,能够抑制接收出射光l1的各种光学部件的大型化,能够实现激光干涉仪1的小型化。
[0058]
成为准直光的出射光l1穿过1/2波长板6,从而被转换为p偏振光与s偏振光的强度比例如为50:50的直线偏振光,并射入光分路器4。
[0059]
1.1.1.3.光分路器
[0060]
光分路器4是配置在激光光源2与光调制器12之间以及激光光源2与测定对象物14之间的偏振光分束器。光分路器4具有使p偏振光透过并使s偏振光反射的功能。通过该功能,光分路器4将出射光l1分成作为光分路器4上的反射光的第一分路光l1a以及作为光分
路器4的透射光的第二分路光l1b。
[0061]
作为由光分路器4反射的s偏振光的第一分路光l1a被1/4波长板8转换为圆偏振光,并射入光调制器12。射入到光调制器12的第一分路光l1a的圆偏振光接收fm[hz]的频移,并作为参照光l2进行反射。因此,参照光l2包括频率fm[hz]的调制信号。参照光l2在再次透过1/4波长板8时被转换为p偏振光。参照光l2的p偏振光透过光分路器4及检偏振器9并射入受光元件10。
[0062]
作为透过光分路器4的p偏振光的第二分路光l1b被1/4波长板7转换为圆偏振光,并射入正在移动的状态的测定对象物14。射入到测定对象物14的第二分路光l1b的圆偏振光接收fd[hz]的多普勒频移,并作为物体光l3进行反射。因此,物体光l3包括频率fd[hz]的采样信号。物体光l3在再次透过1/4波长板7时被转换为s偏振光。物体光l3的s偏振光被光分路器4反射,并透过检偏振器9射入受光元件10。
[0063]
如前所述,出射光l1具有可干涉性,因此,参照光l2及物体光l3作为干涉光射入受光元件10。
[0064]
需要指出,也可以使用非偏振光分束器来取代偏振光分束器。在这种情况下,无需1/2波长板6、1/4波长板7及1/4波长板8等,因此,能够实现部件数量的削减带来的激光干涉仪1的小型化。此外,也可以使用分束器之外的光分路器。
[0065]
1.1.1.4.检偏振器
[0066]
相互正交的s偏振光和p偏振光彼此独立,因此,只是单纯地重叠并不会出现干涉引起的拍频。于是,使s偏振光与p偏振光重叠的光波穿过相对于s偏振光及p偏振光的双方倾斜45
°
的检偏振器9。通过使用检偏振器9,能够使相互通用的分量的光透过而发生干涉。其结果是,在检偏振器9中,参照光l2与物体光l3发生干涉,生成具有|f
m-fd|[hz]的频率的干涉光。
[0067]
1.1.1.5.受光元件
[0068]
当干涉光射入受光元件10时,受光元件10输出受光信号。通过后述的方法从该受光信号解调出采样信号,从而最终能够求出测定对象物14的动作、即振动速度、位移。作为受光元件10,例如可以列举出光电二极管等。受光元件10接收干涉光,并输出光电流。
[0069]
1.1.1.6.光调制器
[0070]
图3是示出图2所示的光调制器12的第一构成例的立体图。
[0071]
1.1.1.6.1.光调制器的第一构成例的概要
[0072]
移频器型的光调制器12具有光调制振子120。图3所示的光调制振子120具备板形状的振动元件30以及支承振动元件30的基板31。
[0073]
振动元件30由通过施加电位而反复进行以在沿着面的方向上歪斜的方式进行振动的模式的材料构成。在本构成例中,振动元件30是在mhz频段的高频区域中沿振动方向36进行厚度切变振动的晶体at振子。在振动元件30的表面上形成有衍射光栅34。衍射光栅34包括具有与振动方向36交叉的分量的槽32、即沿与振动方向36交叉的方向延伸的直线状的多个槽32。
[0074]
基板31包括具有互为正反关系的正面311及背面312。在正面311上配置有振动元件30。此外,在正面311上设置有用于对振动元件30施加电位的垫片33。另一方面,在背面312上也设置有对振动元件30施加电位的垫片35。
[0075]
基板31的大小例如设为长边为0.5mm以上且10.0mm以下左右。此外,基板31的厚度例如设为0.10mm以上且2.0mm以下左右。作为一个例子,基板31的形状设为一边为1.6mm的正方形,其厚度设为0.35mm。
[0076]
振动元件30的大小例如设为长边为0.2mm以上且3.0mm以下左右。此外,振动元件30的厚度例如设为0.003mm以上且0.5mm以下左右。
[0077]
作为一个例子,振动元件30的形状设为一边为1.0mm的正方形,其厚度设为0.07mm。在这种情况下,振动元件30以基本振荡频率24mhz进行振荡。需要指出,通过改变振动元件30的厚度、或者考虑到泛音,从而可以在1mhz至1ghz的范围内对振荡频率进行调整。
[0078]
需要指出,在图3中,衍射光栅34形成于振动元件30的表面整体,但是,也可以仅形成于其表面的一部分。
[0079]
光调制器12的光调制的大小被赋予如下值:射入光调制器12的出射光l1的波数矢量和从光调制器12射出的参照光l2的波数矢量的差值波数矢量与振动元件30的振动方向36的矢量的内积。在本构成例中,振动元件30进行厚度切变振动,但是,由于该振动是面内振动,因此,即便是垂直地向振动元件30单体的表面射入光,也无法进行光调制。于是,在本构成例中,通过将衍射光栅34设置于振动元件30,从而可以利用后述的原理实现光调制。
[0080]
图3所示的衍射光栅34是闪耀衍射光栅。闪耀衍射光栅是指衍射光栅的剖面形状为阶梯状的衍射光栅。衍射光栅34的直线状的槽32设置为其延伸方向与振动方向36正交。
[0081]
如果从图1及图2所示的振荡电路54向图3所示的振动元件30供给驱动信号sd(施加交流电压),则振动元件30进行振荡。振动元件30的振荡所需的电力(驱动功率)并没有特别的限定,但是,小到0.1μw~100mw左右。因此,能够用于在不放大从振荡电路54输出的驱动信号sd的情况下,使振动元件30振荡。
[0082]
此外,以往的光调制器也有需要维持光调制器的温度的结构的情况,因此,难以使体积变小。此外,以往的光调制器由于消耗电力大,因此,具有难以实现激光干涉仪的小型化及省电化的技术问题。针对于此,在本构成例中,振动元件30的体积非常小,振荡所需的电力也小,因此,容易实现激光干涉仪1的小型化及省电化。
[0083]
1.1.1.6.2.衍射光栅的形成方法
[0084]
衍射光栅34的形成方法并没有特别的限定,但是,作为一个例子,可以列举出如下所述的方法:通过使用了机械刻线式(刻线机)的方法来制作模具,在成膜于晶体at振子的振动元件30的表面的电极上通过纳米压印法来形成槽32。这里,设为电极上是因为:在晶体at振子的情况下,原理上,在电极上能够产生高质量的厚度切变振动。需要指出,形成槽32并不限定于电极上,也可以是非电极部的材料的表面上。此外,也可以取代纳米压印法而使用基于曝光及蚀刻的加工方法、电子束描绘光刻法、聚焦离子束加工法(fib)等。
[0085]
此外,通过抗蚀剂材料在晶体at振子的芯片上形成衍射光栅,在此也可以设置金属膜、由电介质多层膜构成的反射镜膜。通过设置金属膜、反射镜膜,能够提高衍射光栅34的反射率。
[0086]
而且,也可以在晶体at振子的芯片、晶圆上形成抗蚀剂膜,在通过蚀刻实施加工后,去除抗蚀剂膜,之后,在加工面上形成金属膜、反射镜膜。在这种情况下,由于抗蚀剂材料被去除,因此,没有抗蚀剂材料的吸湿等带来的影响,能够提高衍射光栅34的化学稳定性。此外,通过设置au、al这样的导电性高的金属膜,也能够用作驱动振动元件30的电极。
[0087]
需要指出,衍射光栅34也可以使用阳极氧化铝(多孔氧化铝)这样的技术而形成。
[0088]
1.1.1.6.3.光调制器的其它构成例
[0089]
振动元件30并不限定于晶体振子,例如也可以是si振子、声表面波(saw)器件、陶瓷振子等。
[0090]
图4是示出光调制器12的第二构成例的一部分的俯视图。图5是示出光调制器12的第三构成例的俯视图。
[0091]
图4所示的振动元件30a是使用mems技术由si基板制造的si振子。mems(micro electro mechanical systems:微机电系统)是指微电子机械系统。
[0092]
振动元件30a具备隔着间隙在同一平面上相邻的第一电极301及第二电极302、设置于第一电极301上的衍射光栅载置部303以及设置于衍射光栅载置部303上的衍射光栅34。第一电极301及第二电极302例如以静电引力作为驱动力,沿着图4的左右方向、即、沿着连接图4所示的第一电极301与第二电极302的轴而反复进行彼此接近和分离的方式来进行振动。由此,能够对衍射光栅34施加面内振动。si振子的振荡频率例如为1khz至数100mhz左右。
[0093]
图5所示的振动元件30b是利用表面波的saw器件。saw(surface acoustic wave:表面声波)是指声表面波。
[0094]
振动元件30b具备压电基板305、设置于压电基板305上的梳齿状电极306、接地电极307、衍射光栅载置部303以及衍射光栅34。如果对梳齿状电极306施加交流电压,则由于反压电效应,声表面波被激励。由此,能够对衍射光栅34施加面内振动。saw器件的振荡频率例如为数100mhz至数ghz左右。
[0095]
关于如上所述的器件,通过设置衍射光栅34,也可以和晶体at振子时同样地通过后述的原理进行光调制。
[0096]
另一方面,在振动元件30是晶体振子的情况下,能够利用晶体具有的极高的q值,生成高精度的调制信号。q值是表示谐振的峰值的锐度的指标。此外,晶体振子具有也不容易受到外部干扰的影响的优势。因此,通过使用由具备晶体振子的光调制器12所调制的调制信号,能够高精度地获取源自于测定对象物14的采样信号。
[0097]
1.1.1.6.4.振动元件的光调制
[0098]
接着,对使用振动元件30对光进行调制的原理进行说明。
[0099]
图6是对从垂直于振动元件30的表面的方向射入了入射光ki时产生多个衍射光的情况进行说明的概念图。
[0100]
如果入射光ki射入沿振动方向36正在进行厚度切变振动的衍射光栅34,则通过衍射现象,如图6所示,产生多个衍射光k
ns
。n是衍射光k
ns
的阶数,n=0、
±
1、
±
2、
…
。需要指出,在图6所示的衍射光栅34中,并非是图3所示的闪耀衍射光栅,而是作为其它的衍射光栅的例子,示出了通过凹凸的重复得到的衍射光栅。此外,在图6中,省略了衍射光k
0s
的图示。
[0101]
在图6中,入射光ki从垂直于振动元件30的表面的方向射入,但是,该射入角并没有特别的限定,也可以以相对于振动元件30的表面倾斜地射入的方式来设定射入角。在倾斜地射入的情况下,衍射光k
ns
的前进方向也与之对应地发生变化。
[0102]
需要指出,根据衍射光栅34的设计,有时不会出现
│n│
≥2的高阶光。于是,为了稳定地得到调制信号,期望设定为
│n│
=1。即,在图2的激光干涉仪1中,优选移频器型的光调
制器12被配置为
±
1阶衍射光被用作参照光l2。通过该配置,能够实现激光干涉仪1的计测的稳定化。
[0103]
另一方面,在从衍射光栅34出现了
│n│
≥2的高阶光的情况下,也可以以不是
±
1阶衍射光、而是将
±
2阶以上的任意衍射光用作参照光l2的方式来配置光调制器12。由此,由于能够利用高阶的衍射光,因此,能够实现激光干涉仪1的高频化和小型化。
[0104]
在本实施方式中,作为一个例子,以射入光调制器12的入射光ki的进入方向与从光调制器12射出的参照光l2的前进方向所成的角度为180
°
的方式构成光调制器12。下面,参照图7至图9对三个例子进行说明。
[0105]
图7至图9分别是对构成为入射光ki的前进方向与参照光l2的前进方向所成的角度为180
°
的光调制器12进行说明的概念图。
[0106]
图7所示的光调制器12除了振动元件30之外还具备反射镜37。反射镜37配置为将衍射光k
1s
反射回衍射光栅34。此时,衍射光k
1s
相对于反射镜37的射入角与反射镜37中的反射角所成的角度为180
°
。其结果是,从反射镜37射出并返回到衍射光栅34的衍射光k
1s
被衍射光栅34再次衍射,向与射入光调制器12的入射光ki的前进方向相反的方向前进。因此,通过增加反射镜37,能够满足如前所述的入射光ki的进入方向与参照光l2的前进方向所成的角度为180
°
的条件。
[0107]
此外,通过这样地经由反射镜37,由光调制器12生成的参照光l2接受两次的频率调制。因此,与使用振动元件30单体的情况相比,通过并用反射镜37可以进行更加高频的频率调制。
[0108]
在图8中,相对于图6的配置而使振动元件30倾斜。此时的倾斜角度θs被设定为满足如前所述的、入射光ki的进入方向与参照光l2的前进方向所成的角度为180
°
的条件。
[0109]
图9所示的衍射光栅34是具有闪耀角θb的闪耀衍射光栅。另外,当相对于振动元件30的表面的法线n以射入角β前进的入射光ki射入至衍射光栅34时,参照光l2相对于法线n以与闪耀角θb相同的角度返回。因此,通过使射入角β等于闪耀角θb,能够满足如前所述的、入射光ki的进入方向与参照光l2的前进方向所成的角度为180
°
的条件。在这种情况下,能够在无需使用图7所示的反射镜37、且不会如图8所示那样使振动元件30自身倾斜的情况下,满足所述条件,因此,能够实现激光干涉仪1的进一步的小型化及高频化。特别是,在闪耀衍射光栅的情况下,将满足所述条件的配置称为“利特罗配置”(littrow configuration),也具有能够特别提高衍射光的衍射效率的优点。
[0110]
需要指出,图9的间距(pitch)p是表示闪耀衍射光栅的间距,作为一个例子,间距p被设为1μm。此外,闪耀角θb例如被设为25
°
。在这种情况下,为了满足所述条件,相对于入射光ki的法线n的射入角β也为25
°
即可。
[0111]
1.1.1.6.5.封装结构
[0112]
图10是示出具有封装结构的光调制器12的剖视图。
[0113]
图10所示的光调制器12具备作为框体的容器70、收纳于容器70的光调制振子120以及构成振荡电路54的电路元件45。需要指出,容器70例如被气密密封在真空等减压气氛、或者氮、氩等惰性气体气氛中。
[0114]
如图10所示,容器70具有容器主体72和盖74。其中,容器主体72具有设置于其内部的第一凹部721以及设置于第一凹部721的内侧且比第一凹部721更深的第二凹部722。容器
主体72例如由陶瓷材料、树脂材料等构成。此外,虽然没有图示,但是,容器主体72具备设置于内表面的内部端子、设置于外表面的外部端子、连接内部端子和外部端子的布线等。
[0115]
此外,容器主体72的开口部隔着未图示的密封环、低熔点玻璃等密封部件而被盖74堵塞。盖74的构成材料可以使用能够透过激光的材料、例如玻璃材料等。
[0116]
在第一凹部721的底面上配置有光调制振子120。光调制振子120通过未图示的接合部件而被支承于第一凹部721的底面。此外,容器主体72的内部端子与光调制振子120之间例如通过接合线、接合金属等未图示的导电材料而电连接。
[0117]
在第二凹部722的底面上配置有电路元件45。电路元件45通过接合线76而与容器主体72的内部端子电连接。由此,光调制振子120与电路元件45之间也通过容器主体72具备的布线而电连接。需要指出,在电路元件45中也可以设置后述的振荡电路54之外的电路。
[0118]
通过采用这样的封装结构,能够使光调制振子120与电路元件45重叠,因此,能够拉近二者的物理距离,能够缩短光调制振子120与电路元件45之间的布线长度。因此,能够抑制噪声从外部进入驱动信号sd、或者反之驱动信号sd成为噪声源。此外,能够通过一个容器70来保护光调制振子120和电路元件45的双方免受外部环境的影响。因此,能够在实现传感器头部51的小型化的同时,提高激光干涉仪1的可靠性。
[0119]
需要指出,容器70的结构并不限定于图示的结构,例如,光调制振子120和电路元件45也可以具有单独的封装结构。此外,虽然没有图示,但是,在容器70中也可以收纳构成振荡电路54的其它电路要素。需要指出,容器70根据需要设置即可,也可以省略。
[0120]
1.1.2.电流电压转换器
[0121]
电流电压转换器531也被称为跨阻放大器(tia),将从受光元件10输出的光电流(受光信号)转换为电压信号,并作为光检测信号输出。
[0122]
需要指出,光学系统50也可以具备多个受光元件10。在这种情况下,通过在多个受光元件10与电流电压转换器531之间设置差动放大电路,从而能够对光电流实施差动放大处理,提高光检测信号的s/n比(信噪比)。需要指出,差动放大处理也可以对电压信号进行。
[0123]
在电流电压转换器531与运算部52之间配置有图1所示的adc532。adc532是模拟-数字转换器,以预定的采样比特数(sampling bit rate)将模拟信号转换为数字信号。
[0124]
1.1.3.振荡电路
[0125]
如图1所示,振荡电路54输出驱动信号sd,该驱动信号sd被输入至光学系统50的光调制器12。此外,振荡电路54输出基准信号ss,该基准信号ss被输入至运算部52。
[0126]
振荡电路54只要是可以使振动元件30振荡的电路则没有特别的限定,可以使用各种构成的电路。作为电路构成的一个例子,在图11中举例示出了表示单极逆变器振荡电路的构成的电路图。
[0127]
图11所示的振荡电路54具备电路元件45、反馈电阻rf、限制电阻rd、第一电容器cg、第二电容器cd以及第三电容器c3。
[0128]
电路元件45是逆变器ic。电路元件45的端子x1及端子x2是分别与电路元件45的内部的逆变器连接的端子。端子gnd与接地电位连接,端子vcc与电源电位连接。端子y是振荡输出用的端子。
[0129]
在端子x1与接地电位之间连接有第一电容器cg。此外,在端子x2与接地电位之间,相互串联地连接的限制电阻rd及第二电容器cd从端子x2侧起依次连接。而且,在端子x1与
第一电容器cg之间连接有反馈电阻rf的一端,在端子x2与限制电阻rd之间连接有反馈电阻rf的另一端。
[0130]
此外,在第一电容器cg与反馈电阻rf之间连接有振动元件30的一端,在第二电容器cd与限制电阻rd之间连接有振动元件30的另一端。由此,振动元件30成为振荡电路54的信号源。
[0131]
图12是振动元件30的lcr等效电路的例子。
[0132]
如图12所示,振动元件30的lcr等效电路由串联电容c1、串联电感l1、等效串联电阻r1以及并联电容c0构成。
[0133]
在图11所示的振荡电路54中,当将第一电容器cg的电容设为cg、将第二电容器cd的电容设为cd时,通过下面的公式(a)来给出负载电容c
l
。
[0134]
数学式1
[0135][0136]
由此,通过下面的公式(b)来给出从振荡电路54的端子y输出的振荡频率f
osc
。
[0137]
数学式2
[0138][0139]fq
是振动元件30的固有振动数。
[0140]
根据上述公式(b)可知通过适当地变更负载电容c
l
能够对从端子y输出的信号的振荡频率f
osc
进行微调。
[0141]
此外,通过下面的公式(c)来给出振动元件30的固有振动数fq与振荡电路54的振荡频率f
osc
的差δf。
[0142]
数学式3
[0143][0144]
这里,由于c1《《c0、c1《《c
l
,因此,通过下面的公式(d)近似地给出δf。
[0145]
数学式4
[0146][0147]
因此,振荡电路54的振荡频率f
osc
成为与振动元件30的固有振动数fq对应的值。
[0148]
这里,当振动元件30例如固定于容器70时,如果经由固定部而接收温度引起的膨胀应力,则固有振动数fq产生变动。此外,如果使振动元件30倾斜,则受到自重引起的重力等的影响,固有振动数fq产生变动。
[0149]
在振荡电路54中,即便是由于这样的理由从而固有振动数fq产生了变动,振荡频率f
osc
也基于上述公式(d)产生变化,使之与该变动连动。也就是说,振荡频率f
osc
始终为从固有振动数fq偏移δf的值。由此,振动元件30的振动稳定,位移振幅稳定。由于位移振幅稳定,从而光调制器12的调制特性稳定,因此,能够提高运算部52中的采样信号的解调精度。
[0150]
作为一个例子,优选δf=|f
osc-fq|≤3000[hz],更优选为600[hz]。
[0151]
如上所述,在本实施方式所涉及的激光干涉仪1中,光调制器12具备振动元件30,光调制器12使用振动元件30对第一分路光l1a进行调制。
[0152]
根据这样的构成,能够实现光调制器12的小型化及轻量化。由此,能够实现激光干涉仪1的小型化及轻量化。
[0153]
此外,激光干涉仪1具备运算部52以及振荡电路54。此外,振荡电路54将振动元件30用作其信号源,如图1所示,向运算部52输出基准信号ss。运算部52基于基准信号ss从光检测信号解调出源自于测定对象物14的采样信号。
[0154]
根据这样的构成,即便是振动元件30的固有振动数fq产生了变动,也能够使振荡电路54的振荡频率f
osc
变化为与振动元件30的固有振动数fq相应的值,因此,能够容易使振动元件30的振动稳定化。由此,能够使调制信号的温度特性与振动元件30的温度特性对应,能够使光调制器12的调制特性稳定。其结果是,能够提高运算部52中的采样信号的解调精度。
[0155]
此外,在上述的构成中,能够使从振荡电路54输出至运算部52的基准信号ss的温度特性也与振动元件30的温度特性对应。由此,调制信号的温度特性和基准信号的温度特性这双方与振动元件30的温度特性对应,因此,温度变化导致的调制信号的变动的行为与基准信号ss的变动的行为一致或近似。因此,即便是振动元件30的温度产生了变化,也能够抑制对于解调精度的影响,能够提高源自于测定对象物14的采样信号的解调精度。
[0156]
而且,由于振荡电路54的消耗电力低,因此,能够容易实现激光干涉仪1的省电化。
[0157]
此外,如前所述,优选振动元件30是晶体振子。由此,能够利用晶体具有的极高的q值,生成高精度的调制信号。其结果是,能够高精度地获取源自于测定对象物14的采样信号。
[0158]
需要指出,也可以代替振荡电路54而使用例如函数发生器、信号发生器等信号生成器。
[0159]
1.2.运算部
[0160]
运算部52进行从电流电压转换器531所输出的光检测信号解调出源自于测定对象物14的采样信号的解调处理。采样信号中例如包括相位信息及频率信息。另外,从相位信息能够获取测定对象物14的位移,从频率信息能够获取测定对象物14的速度。如果能够这样获取不同的物理量,则可以具有作为位移计、测速仪的功能,因此,能够实现激光干涉仪1的高功能化。
[0161]
运算部52根据调制处理的方式来设定其电路构成。在本实施方式所涉及的激光干涉仪1中,使用了具备振动元件30的光调制器12。振动元件30是单振动的元件,因此,在周期内振动速度会时刻发生变化。因此,调制频率也会随时间经过而发生变化,因此,无法直接使用以往的解调电路。
[0162]
以往的解调电路例如是指从光检测信号解调出采样信号的电路,该光检测信号包括使用声光调制器(aom)进行了调制的调制信号。在声光调制器中,调制频率不发生变化。因此,以往的解调电路能够从包括调制频率不发生变化的调制信号的光检测信号解调出采样信号,但是,在包括调制频率发生变化的光调制器12所调制的调制信号的情况下,无法直接进行解调。
[0163]
为此,图1所示的运算部52具有前处理部53、解调处理部55以及正交信号生成部
57。电流电压转换器531所输出的光检测信号首先在通过前处理部53之后,被引导至解调处理部55。前处理部53对光检测信号实施前处理。通过该前处理,进行从受光信号提取频率调制分量的处理,得到可以通过以往的解调电路进行解调的信号。因此,在解调处理部55中,通过公知的解调方式解调出源自于测定对象物14的采样信号。此外,在正交信号生成部57中,基于振荡电路54所输出的基准信号ss及前处理部53所输出的前处理信号s(t),生成作为正交信号的余弦波信号cos(θm(t))及正弦波信号sin(θm(t))。
[0164]
运算部52具有的上述功能例如通过具备处理器、存储器、外部接口、输入部、显示部等硬件来实现。这些构成要素通过内部总线可以相互通信。
[0165]
作为处理器,例如可以列举出fpga(field-programmable gate array:现场可编程门阵列)、cpu(central processing unit:中央处理单元)、dsp(digital signal processor:数字信号处理器)等。
[0166]
作为存储器,例如可以列举出hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)、eeprom(electrically erasable programmable read-only memory:电可擦除可编程只读存储器)、rom(read-only memory:只读存储器)、ram(random access memory:随机存取存储器)等。
[0167]
作为外部接口,例如可以列举出usb(universal serial bus:通用串行总线)等数字输入输出端口、以太网(注册商标)端口等。
[0168]
作为输入部,例如可以列举出键盘、鼠标、触摸面板、触摸板等各种输入装置。作为显示部,例如可以列举出液晶显示面板、有机el(electro luminescence:电致发光)显示面板等。
[0169]
1.2.1.前处理部的构成
[0170]
图1所示的前处理部53具备第一带通滤波器534、第二带通滤波器535、第一延迟调整器536、乘法器538、第三带通滤波器539、第一agc部540、第二agc部541以及加法器542。需要指出,agc是自动增益控制(auto gain control)。
[0171]
电流电压转换器531所输出的光检测信号被分支部jp1分割为第一信号s1和第二信号s2这两个信号。在图1中,将第一信号s1的路径设为第一信号路径ps1,将第二信号s2的路径设为第二信号路径ps2。
[0172]
第一带通滤波器534、第二带通滤波器535及第三带通滤波器539分别是使指定的频带的信号选择性地透过的滤波器。
[0173]
第一延迟调整器536是利用临时地存储信号的存储器来调整信号的延迟的电路。乘法器538是生成与两个输入信号的乘积成比例的输出信号的电路。加法器542是生成与两个输入信号之和成比例的输出信号的电路。
[0174]
接着,按照第一信号s1及第二信号s2的流向对前处理部53的动作进行说明。
[0175]
第一信号s1在通过配置在第一信号路径ps1上的第一带通滤波器534之后,由第一延迟调整器536来调整群延迟。由第一延迟调整器536调整的群延迟相当于基于后述的第二带通滤波器535的第二信号s2的群延迟。通过该延迟调整,在第一信号s1通过的第一带通滤波器534与第二信号s2通过的第二带通滤波器535及第三带通滤波器539之间,能够使滤波器电路的通过导致的延迟时间一致。通过第一延迟调整器536后的第一信号s1经由第一agc部540被输入加法器542。
[0176]
第二信号s2在通过配置在第二信号路径ps2上的第二带通滤波器535之后,被输入乘法器538。在乘法器538中,使第二信号s2乘以正交信号生成部57所输出的余弦波信号cos(θm(t))。之后,第二信号s2在通过第三带通滤波器539之后,经由第二agc部541被输入加法器542。
[0177]
加法器542输出与第一信号s1和第二信号s2之和成比例的信号。
[0178]
1.2.2.前处理
[0179]
接着,对前处理部53中的前处理进行说明。需要指出,在下面的说明中,作为一个例子,考虑作为调制信号频率以正弦波状进行变化且测定对象物14的位移也是在光轴方向上以单振动进行变化的系统。这里,将em、ed、设为如下。
[0180]
数学式5
[0181]em
=am{cos(ω0t+b sinωmt+φm)+i sin(ω0t+b sinωmt+φm)}
ꢀꢀꢀꢀꢀ
(1)
[0182]
ed=ad{cos(ω0t+a sinωdt+φd)+i sin(ω0t+a sinωdt+φd)}
ꢀꢀꢀꢀꢀ
(2)
[0183]
φ=φ
m-φdꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0184]
此时,从电流电压转换器531输出的光检测信号i
pd
理论上由下式表示。
[0185]
数学式6
[0186]ipd
=《|em+ed|2》
[0187]
=《|e
m2
+e
d2
+2emed|》
[0188]
=a
m2
+a
d2
+2a
mad cos(b sinωmt-a sinωdt+φ)
ꢀꢀꢀꢀꢀ
(4)
[0189]
需要指出,em、ed、ωm、ωd、ω0、am、ad分别如下所示。
[0190]
数学式7
[0191]em
:源自于光调制器的调制信号的电场分量
[0192]
ed:源自于测定对象物的采样信号的电场分量
[0193]
源自于光调制器的调制信号的初始相位
[0194]
源自于测定对象物的采样信号的初始相位
[0195]
激光干涉计的光路相位差
[0196]
ωm:源自于光调制器的调制信号的角频率
[0197]
ωd:源自于测定对象物的采样信号的角频率
[0198]
ω0:从光源射出的出射光的角频率
[0199]am
:系数
[0200]ad
:系数
[0201]
此外,公式(4)中的《》表示时间平均。
[0202]
上述式(4)的第一项及第二项表示直流分量,第三项表示交流分量。当将该交流分量设为i
pd
·
ac
时,i
pd
·
ac
如下式所示。
[0203]
数学式8
[0204]ipd
·
ac
=2a
mad
cos(b sinωmt-a sinωdt+φ)
[0205]
=2a
mad
{cos(b sinωmt)cos(a sinωdt-φ)+sin(b sinωmt)sin(a sinωdt-φ)}
ꢀꢀꢀꢀ
(5)
[0206]
[0207][0208]
a:采样信号的相位偏移
[0209]fdmax
:采样信号的多普勒频率偏移
[0210]
fd:采样信号的频率
[0211]
b:调制信号的相位偏移
[0212]fmmax
:调制信号的多普勒频率偏移
[0213]fm
:调制信号的频率
[0214]
这里,已知有下述公式(8)及公式(9)那样的ν阶贝塞尔函数。
[0215]
数学式9
[0216]
cos{ζsin(2πfvt)}=j0(ζ)+2j2(ζ)cos(2
·
2πfvt)+2j4(ζ)cos(4
·
2πf
ν
t)+
…ꢀ
(8)
[0217]
sin{ζsin(2πf
ν
t)}=2j1(ζ)sin(1
·
2πfvt)+2j3(ζ)sin(3
·
2πf
ν
t)+
…ꢀꢀꢀꢀꢀ
(9)
[0218]
当使用上述公式(8)及公式(9)的贝塞尔函数对上述公式(5)进行级数展开时,能够如下述公式(10)那样地进行变形。
[0219]
数学式10
[0220]ipd
·
ac
=2a
mad
[{j0(b)+2j2(b)cos(2
·
ωmt)+2j4(b)cos(4
·
ωmt)+
…
}cos(a sinωdt-φ)-{2j1(b)sin(1
·
ωmt)+2j3(b)sin(3
·
ωmt)+
…
}sin(a sinωdt-φ)]
ꢀꢀꢀꢀꢀ
(10)
[0221]
其中,j0(b)、j1(b)、j2(b)、...分别是贝塞尔系数。
[0222]
如果以如上所述的方式进行变形,则理论上可以说通过带通滤波器可以提取指定的阶数对应的频带。
[0223]
为此,在前述的前处理部53中,基于该理论,按照下面的流程对光检测信号的交流分量进行前处理。
[0224]
首先,从电流电压转换器531输出的光检测信号的交流分量通过adc532而使振幅归一化。通过adc532后的信号由下述公式(10-1)表示。
[0225]
数学式11
[0226]iadc_beat
={j0(b)+2j2(b)cos(2ωmt)+2j4(b)cos(4ωmt)+
…
}cos(a sinωdt-φ)-2{j0(b)+j1(b)sin(ωmt)+j3(b)sin(3ωmt)+
…
}sin(a sinωdt-φ)
ꢀꢀꢀ
(10-1)
[0227]
然后,通过adc532后的信号被分支部jp1分割为第一信号s1和第二信号s2这两个信号。第一信号s1通过第一带通滤波器534。在第一带通滤波器534中,中心角频率被设定为ωm。由此,通过第一带通滤波器534后的第一信号s1由下面的公式表示。
[0228]
数学式12
[0229]ibpf1
=j1(b){-cos(ωmt+a sinωdt-φ)+cos(ωmt-a sinωdt+φ)}
[0230]
=-2j1(b)sin(ωmt)
·
sin(a sinωdt-φ)
ꢀꢀꢀꢀꢀ
(11)
[0231]
另一方面,第二信号s2通过第二带通滤波器535。第二带通滤波器535的中心角频率被设定为与第一带通滤波器534的中心角频率不同的值。这里,作为一个例子,将第二带通滤波器535的中心角频率设定为2ωm。由此,通过第二带通滤波器535后的第二信号s2由下面的公式表示。
[0232]
数学式13
[0233]ibpf2
=2j2(b)cos(2ωmt)
·
cos(a sinωdt-φ)
ꢀꢀꢀꢀꢀ
(12)
[0234]
在通过第二带通滤波器535后的第二信号s2上,在乘法器538中乘以后述的正交信号生成部57所输出的余弦波信号cos(θm(t))。通过乘法器538后的第二信号s2由下面的公式表示。
[0235]
数学式14
[0236]i538
=i
bpf2
*cos(θm(t))
[0237]
=2j2(b)cos(2ωmt)
·
cos(a sinωdt-φ)
·
cos(ωmt-α)
[0238]
={j2(b)cos(a sinωdt-φ)}
·
{cos(3ωmt-α)+cos(ωmt+α)}
ꢀꢀꢀꢀꢀ
(13)
[0239]
上述公式(13)中的α在基准信号ss的相位偏移原本的相位时是其偏移幅度。原本的相位是指从前处理部53输出的前处理信号s(t)为仅经频率调制的信号时、或成为与之相当的信号时的相位。
[0240]
通过乘法器538后的第二信号s2通过第三带通滤波器539。第三带通滤波器539的中心角频率被设定为与第一带通滤波器534的中心角频率相同的值。这里,作为一个例子,将第三带通滤波器539的中心角频率设定为ωm。由此,通过第三带通滤波器539后的第二信号s2由下面的公式表示。
[0241]
数学式15
[0242]ibpf3
=j2(b)cos(ωmt+α)cos(a sinωdt-φ)
ꢀꢀꢀꢀꢀ
(14)
[0243]
之后,对于上述公式(11)所表示的第一信号s1,利用第一延迟调整器536来调整相位,并利用第一agc部540来调整振幅。
[0244]
此外,上述公式(14)所表示的第二信号s2也利用第二agc部541来调整振幅,使第二信号s2的振幅与第一信号s1的振幅一致。调整振幅后的第一信号s1由下述公式(14-1)表示,调整振幅后的第二信号s2由下述公式(14-2)表示。
[0245]
数学式16
[0246]iagc1
=-sin(ωmt)
·
sin(a sinωdt-φ)
ꢀꢀꢀꢀꢀ
(14-1)
[0247]iagc2
=cos(ωmt+α)cos(a sinωdt-φ)
ꢀꢀꢀꢀꢀ
(14-2)
[0248]
另外,第一信号s1及第二信号s2在加法器542中相加。将加法结果作为前处理信号s(t)。前处理信号s(t)由下述公式(15)表示。
[0249]
数学式17
[0250]
s(t)=i
agc1
+i
agc2
[0251]
=-sin(ωmt)
·
sin(a sinωdt-φ)+cos(ωmt+α)cos(a sinωdt-φ)
ꢀꢀꢀꢀ
(15)
[0252]
如上述公式(15)所示,前处理信号s(t)由包括相位的偏移幅度α的公式表示。因此,当相位的偏移幅度α为π的整数倍时,上述公式(15)由下述公式(15-1)表示。
[0253]
数学式18
[0254]
s(t)=-sin(ωmt)
·
sin(a sinωdt-φ)+cos(ωmt)cos(a sinωdt-φ)
[0255]
=cos(ωmt+a sinωdt-φ)
ꢀꢀꢀꢀꢀꢀ
(15-1)
[0256]
在本说明书中,当前处理信号s(t)可由上述公式(15-1)表示时,称为“相位一致”。另一方面,当前处理信号s(t)可由上述(15)表示且相位的偏移幅度α为π的整数倍之外的值时,称为“相位不一致”。
[0257]
当相位一致时,前处理信号s(t)可由上述公式(15-1)表示,因此,可以说是仅经频率调制的信号。在这样的前处理信号s(t)中,被提取了频率调制分量,因此,在解调处理部
55中,采样信号的解调精度得以提高。另一方面,当相位不一致时,前处理信号s(t)可以说是频率调制与振幅调制重叠的信号。在这样的前处理信号s(t)中,在解调处理部55中难以提高采样信号的解调精度。
[0258]
1.2.3.正交信号生成部的构成
[0259]
图1所示的正交信号生成部57具有第四带通滤波器571、希尔伯特转换滤波器572、第二延迟调整器573(基准信号延迟器)、基准信号相位运算器574、绝对值运算器577、第三低通滤波器578、相位量设定部579、加法器580、余弦运算器581以及正弦运算器582。
[0260]
在本实施方式中,基于基准信号ss的相位以及前处理信号s(t)的振幅,正交信号生成部57生成作为正交信号的余弦波信号cos(θm(t))及正弦波信号sin(θm(t))。在本说明书中,将生成这样的正交波形的处理称为“正交波形生成处理”。
[0261]
在振荡电路54与第四带通滤波器571之间连接有adc533。adc533是模拟-数字转换器,以预定的采样比特数将模拟信号转换为数字信号。第四带通滤波器571是选择性地使指定频带的信号透过的滤波器。
[0262]
希尔伯特转换滤波器572对基准信号ss进行希尔伯特转换处理而得到信号i。振荡电路54所输出的基准信号ss是由cos(ωmt)所表示的信号。ωm是光调制器12的调制信号的角频率,t是时间。希尔伯特转换处理进行使该基准信号ss的相位偏移π/2的处理。
[0263]
第二延迟调整器573是利用暂时地存储信号的存储器对信号的延迟进行调整的电路,使基准信号ss产生与通过希尔伯特转换处理所产生的延迟同等的延迟。由此得到信号r。
[0264]
基准信号相位运算器574根据希尔伯特转换滤波器572所输出的信号i以及第二延迟调整器573所输出的信号r计算出基准信号ss的相位。具体而言,对信号i/信号r的比进行反正切运算、即atan(i/r)的运算。
[0265]
绝对值运算器577计算出前处理部53所输出的前处理信号s(t)的绝对值。第三低通滤波器578是针对绝对值运算器577所输出的前处理信号s(t)的绝对值,滤除高频的频带的信号的滤波器。
[0266]
相位量设定部579具有针对第三低通滤波器578所输出的信号获取包络线的功能、获取包络线的最大值及最小值(包络线的振幅)的功能以及输出相位量a的功能。
[0267]
加法器580输出和来自基准信号相位运算器574的输出与来自相位量设定部579的输出之和成比例的信号。余弦运算器581基于加法器580所输出的信号生成余弦波信号cos(θm(t))。正弦运算器582基于加法器580所输出的信号生成正弦波信号sin(θm(t))。
[0268]
1.2.4.正交波形生成处理
[0269]
在正交波形生成处理中,首先,将adc533所输出的基准信号ss输入第四带通滤波器571。在第四带通滤波器571中,中心角频率被设定为ωm。第四带通滤波器571所输出的基准信号ss被一分为二,其中一个被输入希尔伯特转换滤波器572,另一个被输入第二延迟调整器573。
[0270]
希尔伯特转换滤波器572使基准信号ss的相位偏移π/2,以生成信号i。第二延迟调整器573使基准信号ss延迟,以生成信号r。信号i及信号r被输入基准信号相位运算器574。
[0271]
基准信号相位运算器574进行atan(i/r)的运算,获取基准信号ss的相位。运算结果atan(i/r)被输入加法器580。
[0272]
另一方面,绝对值运算器577获取前处理信号s(t)的绝对值。由此,能够将前处理信号s(t)的负侧的波形转换为正侧进行合成。来自绝对值运算器577的信号被输入第三低通滤波器578。
[0273]
第三低通滤波器578滤除高频的频带的信号。由此,能够容易且高精度地获取相位量设定部579中的包络线。来自第三低通滤波器578的信号被输入相位量设定部579。
[0274]
相位量设定部579基于来自第三低通滤波器578的信号,设定在加法器580中应对运算结果atan(i/r)相加的相位量a。也就是说,正交信号生成部57对基准信号ss的相位进行调整。关于设定方法将在后面描述。
[0275]
在加法器580中,计算出来自基准信号相位运算器574的输出与来自相位量设定部579的输出之和。这里,将和设为β。β为a+atan(i/r)。另外,余弦运算器581生成余弦波信号cos(θm(t)),正弦运算器582生成正弦波信号sin(θm(t))。余弦波信号cos(θm(t))被输入乘法器538及后述的解调处理部55,正弦波信号sin(θm(t))被输入解调处理部55。需要指出,θm(t)为ωmt-β。
[0276]
1.2.5.相位量设定方法
[0277]
在相位量设定部579中,当相位不一致时,设定通过加法器580相加的相位量a,以使前述的振幅调制的影响变得极小。由此,在余弦运算器581及正弦运算器582中,生成基于相位量a的余弦波信号cos(θm(t))及正弦波信号sin(θm(t))。由此,该余弦波信号cos(θm(t))经由乘法器538而被反映在前处理信号s(t)中,降低前处理信号s(t)中的振幅调制的影响。另外,最终的结果是能够使相位一致。此外,当相位一致时的余弦波信号cos(θm(t))及正弦波信号sin(θm(t))被输入解调处理部55时,能够高精度地针对前处理信号s(t)进行解调处理。
[0278]
图13是示出图1所示的相位量设定部579设定相位量的方法的一个例子的流程图。图13所示的相位量的设定优选使用以单一的频率进行振动的标准样品作为测定对象物14来进行。由此,相位量设定部579能够更加准确地求出在加法器580中应相加的相位量a。在图13所示的相位量的设定方法中,在使相位量a的值一点点产生变化的同时,对前处理信号s(t)的振幅进行反复评价。另外,将振幅成为预定值以下时的相位量a作为最佳值保存于存储器。另外,在求出最佳的相位量a之后,通过使相位量a固定,可以对各种测定对象物14进行高精度的计测。
[0279]
因此,例如在通过激光干涉仪1进行测定对象物14的计测之前时等,使用前述的标准样品进行图13所示的相位量设定方法。由此,能够自动地校准激光干涉仪1。作为标准样品,例如可以列举出压电元件、晶体振子等。
[0280]
在图13所示的工序s102中,首先,对符号函数sgn及相位量a进行初始化。具体而言,将值1输入符号函数sgn,将值a0输入相位量a。值a0为任意值。
[0281]
在工序s104中,经由绝对值运算器577及第三低通滤波器578获取前处理信号s(t)的包络线。作为包络线的获取方法,例如可以列举出使用低通滤波器的方法、使用希尔伯特转换的方法等。另外,在工序s104中,获取包络线的最大值及最小值,且将最大值与最小值之差ds0保存于存储器。该差ds0相当于前处理信号s(t)的振幅。
[0282]
在工序s106中,通过a+sgn*δa
→
a这样的公式,在相位量设定部579中对相位量a进行更新并设定为输出值。该公式意指:根据符号函数sgn可取的两个值、即1或-1,相对于
相位量a的当前值加上或减去微小量δa,从而成为新的相位量a。微小量δa只要是小于相位量a的量即可,并没有特别的限定。更新后的相位量a输出至加法器580。由此,在正交信号生成部57中,基于相位量设定部579所设定的新的相位量a对基准信号ss的相位进行调整,生成正交的两个信号、即余弦波信号cos(θm(t))及正弦波信号sin(θm(t))。然后,在前处理部53中,基于余弦波信号cos(θm(t))生成新的前处理信号s(t)。
[0283]
在工序s108中,关于新的前处理信号s(t),与工序s104同样地获取包络线的最大值与最小值之差并保存于存储器。在工序s108中,将该差设为ds1。
[0284]
在工序s110中,判断差ds1是否为预定值以下。预定值是指例如当前处理信号s(t)被视为仅经频率调制的信号时的、包络线的最大值与最小值之差。因此,如果差ds1为预定值以下,则能够判断为当前的相位量a为最佳。因此,结束该流程。另一方面,当差ds1大于预定值时,则能够判断为当前的相位量a并非最佳,因此,转移至工序s112。
[0285]
在工序s112中,获取进行了几次工序s110中的判断、即获取其次数。另外,判断所获取的次数是否为预定次数以上。预定次数是指:例如如前所述,在使相位量a的值一点点产生变化的同时对前处理信号s(t)的振幅进行反复评价时,能够求出最佳的相位量a时的反复次数的实际值,特别是能够采用该实际值中的最大值。作为反复次数的具体例,可以列举出更新相位量a的次数等。
[0286]
当所获取的次数为预定次数以上时,能够判断为难以求出最佳的相位量a,因此,转移至工序s114。在工序s114中,相位量设定部579发出错误。在这种情况下,在前述的显示部上显示发生了错误,只要促使用户进行例如变更标准样品等应对即可。发出错误后,结束流程。
[0287]
另一方面,当所获取的次数小于预定次数时,转移至工序s116。
[0288]
在工序s116中,判断差ds0》差ds1是否成立。当成立时,能够判断为在新的前处理信号s(t)中降低了振幅调制的影响。此外,能够判断为在工序s102中进行初始化后的符号函数sgn的值恰当。在这种情况下,转移至工序s118。在工序s118中,将差ds1的当前值输入差ds0。然后,返回工序s106。在第二次的工序s106中,再次通过a+sgn*δa
→
a这样的公式对相位量a进行更新。关于该公式中的符号函数sgn,由于已进行了其是恰当值的判断,所以保持不变。然后,在前处理部53中,生成反映了更新后的相位量a的新的前处理信号s(t)。
[0289]
在第二次的工序s108中,关于新的前处理信号s(t),获取包络线的最大值与最小值之差并保存于存储器。在第二次的工序s108中获取的差ds1小于第一次的工序s108中获取的差ds1。因此,关于新的前处理信号s(t),振幅调制的影响进一步减小,接近于仅经频率调制的信号。
[0290]
另一方面,在工序s116中,当差ds0》差ds1不成立时,也就是说,当差ds0≤差ds1时,能够判断为没有确认到在新的前处理信号s(t)中降低了振幅调制的影响。此外,能够判断为在工序s102中初始化后的符号函数sgn的值不恰当。在这种情况下,转移至工序s120。
[0291]
在工序s120中,将符号函数sgn设为与当前值相反。也就是说,将当前值乘以-1所得的值输入新的符号函数sgn。之后,转移至工序s118。
[0292]
根据图13所示的流程,只要没有发出错误,则反复进行相位量a的更新、前处理信号s(t)的更新以及差ds0的更新,直至差ds1成为预定值以下。其结果是,在相位量设定部579中进行相位量a的调整,且生成作为基于该调整的正交信号的余弦波信号cos(θm(t))及
正弦波信号sin(θm(t)),直至前处理信号s(t)被视为仅经频率调制的信号。
[0293]
通过将这样生成的余弦波信号cos(θm(t))输入前处理部53,从而能够使前处理信号s(t)接近原本的相位。其结果是,能够进行激光干涉仪1的校准。另外,在校准后,使用所得到的最佳的相位量a进行测定对象物14的计测即可。由此,能够提高从光检测信号解调出采样信号的精度,能够高精度地进行测定对象物14的计测。
[0294]
需要指出,激光干涉仪1的校准可以以任何定时、频率进行。
[0295]
1.2.6.解调处理部的构成
[0296]
解调处理部55进行从前处理信号s(t)解调出源自于测定对象物14的采样信号的解调处理。作为解调处理,并没有特别的限定,但是,可以列举出公知的正交检波法。正交检波法是通过对输入信号进行从外部混合彼此正交的信号的操作来进行解调处理的方法。
[0297]
图1所示的解调处理部55是具备乘法器551、乘法器552、反相放大器553、第一低通滤波器555、第二低通滤波器556、除法器557、反正切运算器558以及信号输出部559的数字电路。
[0298]
乘法器551、552是生成与两个输入信号的乘积成比例的输出信号的电路。反相放大器553是生成增益为-1倍、振幅不发生变化、且使输入信号的相位反相后的输出信号的电路。第一低通滤波器555及第二低通滤波器556分别是滤除高频的频带的信号的滤波器。
[0299]
除法器557是生成与两个输入信号的商成比例的输出信号的电路。反正切运算器558是输出输入信号的反正切的电路。信号输出部559根据反正切运算器558所获取的相位计算出相位作为源自于测定对象物14的信息。此外,信号输出部559通过相位展开处理进行在相邻的两点处具有2π的相位跳变时的相位连接。另外,根据所得到的相位信息计算出测定对象物14的位移。由此,位移计得以实现。此外,能够根据位移求出测定对象物14的速度。由此,测速仪得以实现。
[0300]
需要指出,解调处理部55并不限定于数字电路,也可以是模拟电路。在模拟电路中也可以包括f/v转换器电路、δσ计数器电路。
[0301]
此外,在上述的解调处理部55中,也可以计算出源自于测定对象物14的频率信息。基于频率信息,能够计算出测定对象物14的速度。
[0302]
1.2.7.解调处理
[0303]
在解调处理中,首先,通过分支部jp2将前处理信号s(t)一分为二。对于分割后的其中一个信号,在乘法器551中,经由反相放大器553对正弦运算器582所输出的正弦波信号sin(θm(t))进行乘法运算。也就是说,在乘法器551中,在前处理信号s(t)中混合使正弦波信号sin(θm(t))的相位反相后得到的信号-sin(θm(t))。对于分割后的另一个信号,在乘法器552中,乘以余弦运算器581所输出的余弦波信号cos(θm(t))。也就是说,在乘法器552中,在前处理信号s(t)中混合余弦波信号cos(θm(t))。
[0304]
通过了乘法器551的信号通过第一低通滤波器555,之后,作为信号y而被输入除法器557。通过了乘法器552的信号通过第二低通滤波器556,之后,作为信号x而被输入除法器557。需要指出,在本说明书中,将信号x、y合起来称为“混合信号”。在除法器557中,进行信号y除以信号x的除法运算,使其输出y/x通过反正切运算器558以求出运算结果atan(y/x)。由此,求出采样信号的相位信息。
[0305]
之后,通过将运算结果atan(y/x)输入信号输出部559,从而输出测定对象物14的
位移、速度。
[0306]
图14是表示进行基于图13所示的流程的激光干涉仪1的校准之前的前处理信号s(t)、解调处理部55进行解调后的相位信息(展开前的相位信息)以及信号输出部559进行相位展开处理后的相位信息(展开后的相位信息)的波形的例子。
[0307]
如图14所示,进行校准之前的前处理信号s(t)的波形的振幅大幅变化,成为频率调制与振幅调制重叠的信号。因此,前处理信号s(t)的包络线的振幅也变大。因此,在图14所示的展开前的相位信息中,在箭头所示的部位产生不规则的波形,展开后的相位信息的波形成为不连续的波形。在这种情况下,难以根据展开后的相位信息精度优良地求出测定对象物14的位移。
[0308]
图15是表示进行了基于图13所示的流程的激光干涉仪1的校准之后的前处理信号s(t)、解调处理部55进行解调后的相位信息(展开前的相位信息)以及信号输出部559进行相位展开处理后的相位信息(展开后的相位信息)的波形的例子。
[0309]
如图15所示,进行了校准之后的前处理信号s(t)的波形的振幅的变化小,几乎成为仅经频率调制的信号。因此,前处理信号s(t)的包络线的振幅也变小。因此,在图15所示的展开前的相位信息中,未产生不规则的波形。此外,图15所示的展开后的相位信息的波形成为连续的波形。在这种情况下,能够精度优良地根据展开后的相位信息求出测定对象物14的位移。
[0310]
1.2.8.第一实施方式的效果
[0311]
如上所述,本实施方式所涉及的激光干涉仪1具备激光光源2、光调制器12、受光元件10以及运算部52。激光光源2射出出射光l1(第一激光)。光调制器12具备振动元件30,使用振动元件30对出射光l1进行调制,生成包括调制信号的参照光l2(第二激光)。受光元件10接收包括出射光l1被测定对象物14反射所生成的采样信号的物体光l3(第三激光)以及参照光l2,并输出受光信号。运算部52基于基准信号ss,根据受光信号求出测定对象物14的位移。
[0312]
此外,运算部52具有前处理部53、解调处理部55以及正交信号生成部57。前处理部53进行从受光信号提取频率调制分量的前处理,并输出前处理信号s(t)。解调处理部55在前处理信号s(t)中混合正交信号而得到信号x、y(混合信号)之后,进行从信号x、y取出采样信号的解调处理。另外,在本实施方式中,正交信号生成部57基于基准信号ss的相位以及前处理信号s(t)的振幅,生成前述的正交信号。
[0313]
在这样的构成中,正交信号生成部57基于前处理信号s(t)的振幅对基准信号ss的相位进行调整。另外,通过将作为调整后的信号的余弦波信号cos(θm(t))输入前处理部53,从而能够使前处理信号s(t)接近仅经频率调制的信号,能够提高从受光信号解调出源自于测定对象物14的采样信号的精度。也就是说,能够为了可以进行高精度的解调处理而对激光干涉仪1进行校准。其结果是,即便是在使用了振荡电路54所输出的基准信号ss的情况下,也能够实现可以高精度地计测测定对象物14的位移、速度的激光干涉仪1。由此,能够容易实现激光干涉仪1的小型化、轻量化及低成本化。
[0314]
此外,正交信号生成部57具有根据前处理信号s(t)的振幅来设定正交信号的相位的相位量设定部579。
[0315]
如前所述,相位量设定部579具有设定在加法器580中应相加的相位量a的功能。另
外,正交信号生成部57基于相位量a对基准信号ss的相位进行调整,生成正交信号、即余弦波信号cos(θm(t))及正弦波信号sin(θm(t))。该正交信号在解调处理部55中混合于前处理信号s(t)。通过恰当地设定相位量a,能够在前处理信号s(t)和正交信号中使相位一致。其结果是,在解调处理部55中,能够高精度地针对前处理信号s(t)进行解调处理。
[0316]
相位量设定部579对正交信号的相位进行设定,以使前处理信号s(t)的振幅的最大值与前处理信号s(t)的振幅的最小值之差成为预定值以下。
[0317]
由此,为使前处理信号s(t)成为仅经频率调制的信号或与之相当的信号,能够在相位量设定部579中高效地找出最佳的相位量a。
[0318]
正交信号生成部57具有希尔伯特转换滤波器572、第二延迟调整器573(基准信号延迟器)以及基准信号相位运算器574。希尔伯特转换滤波器572对基准信号ss进行希尔伯特转换处理,而得到信号i。第二延迟调整器573使基准信号ss产生延迟,而得到信号r。基准信号相位运算器574对信号i/信号r的比进行反正切运算,而得到基准信号ss的相位。
[0319]
根据这样的构成,无需进行基准信号ss的样本化(采样),能够瞬间得到基准信号ss的相位。因此,在具有这样的相位量设定部579的正交信号生成部57中,能够在短时间内将基准信号ss的相位反映于正交信号。其结果是,在相位量设定部579中,能够迅速地找出最佳的相位量a。
[0320]
2.第二实施方式
[0321]
接着,对第二实施方式所涉及的激光干涉仪进行说明。
[0322]
图16是示出第二实施方式所涉及的激光干涉仪的功能框图。
[0323]
下面,对第二实施方式进行说明,但是,在下面的说明中,以与第一实施方式的不同点为中心进行说明,关于同样的事项则省略其说明。需要指出,在图16中,对于和第一实施方式同样的构成标注了相同的附图标记。
[0324]
在前述的第一实施方式中,基于基准信号ss的相位以及从前处理信号s(t)的包络线获取的前处理信号s(t)的振幅,正交信号生成部57生成正交信号。针对于此,在本实施方式中,基于基准信号ss的相位以及信号x、y(混合信号)的振幅,正交信号生成部57a生成正交信号。
[0325]
2.1.解调处理部
[0326]
图16所示的解调处理部55a除了增加了混合信号振幅运算器560之外,均与图1所示的解调处理部55相同。
[0327]
混合信号振幅运算器560是对于信号x和信号y这样的两个输入信号进行2(x2+y2)
1/2
的运算并输出运算结果的电路。该运算结果相当于“混合信号的振幅”。在本说明书中,将从混合信号振幅运算器560输出的信号称为“振幅信号sa”。
[0328]
2.2.正交信号生成部
[0329]
图16所示的正交信号生成部57a除了省略了绝对值运算器577及第三低通滤波器578、且向相位量设定部579a输入混合信号振幅运算器560所输出的振幅信号sa之外,均与图1所示的正交信号生成部57相同。
[0330]
相位量设定部579a具有针对振幅信号sa获取最大值及最小值的功能以及输出相位量a的功能。因此,相位量设定部579a的相位量设定方法除了将图13所示的“前处理信号s(t)的包络线”替换为“振幅信号sa”之外,均与图13所示的方法相同。
[0331]
2.3.第二实施方式的效果
[0332]
本实施方式所涉及的激光干涉仪1a与第一实施方式同样地具备激光光源2、光调制器12、受光元件10以及运算部52。其中,如图16所示,运算部52具有前处理部53、解调处理部55a以及正交信号生成部57a。前处理部53进行从受光信号提取频率调制分量的前处理,并输出前处理信号s(t)。解调处理部55a在将正交信号混合于前处理信号s(t)而得到信号x、y(混合信号)之后,进行从信号x、y取出采样信号的解调处理。正交信号生成部57a基于基准信号ss的相位以及信号x、y的振幅生成正交信号。
[0333]
在这样的构成中,正交信号生成部57a基于振幅信号sa对基准信号ss的相位进行调整。另外,通过将作为调整后的信号的余弦波信号cos(θm(t))输入前处理部53,能够使前处理信号s(t)接近仅经频率调制的信号,能够提高从受光信号解调出源自于测定对象物14的采样信号的精度。由此,能够对激光干涉仪1a进行校准。其结果是,即便是在使用了振荡电路54所输出的基准信号ss的情况下,也能够实现可以高精度地计测测定对象物14的位移、速度的激光干涉仪1a。由此,能够容易实现激光干涉仪1a的小型化、轻量化及低成本化。
[0334]
此外,正交信号生成部57a具有根据信号x、y(混合信号)的振幅来设定正交信号的相位的相位量设定部579a。
[0335]
相位量设定部579a与相位量设定部579同样地具有设定在加法器580中应相加的相位量a的功能。另外,正交信号生成部57a与正交信号生成部57同样地基于相位量a对基准信号ss的相位进行调整,生成正交信号、即余弦波信号cos(θm(t))及正弦波信号sin(θm(t))。该正交信号在解调处理部55中被混合于前处理信号s(t)。通过恰当地设定相位量a,能够在前处理信号s(t)和正交信号中使相位一致。其结果是,在解调处理部55中,能够高精度地针对前处理信号s(t)进行解调处理。
[0336]
相位量设定部579a设定正交信号的相位,以使信号x、y(混合信号)的振幅的最大值与信号x、y(混合信号)的振幅的最小值之差成为预定值以下。
[0337]
由此,为使前处理信号s(t)成为仅经频率调制的信号或与之相当的信号,能够在相位量设定部579a中高效地找出最佳的相位量a。
[0338]
此外,图16所示的解调处理部55a具有得到信号x、y(混合信号)的振幅的混合信号振幅运算器560。
[0339]
根据这样的构成,能够在无需得到前处理信号s(t)的包络线的情况下,得到前处理信号s(t)的振幅。也就是说,能够省略第一实施方式中的绝对值运算器577、第三低通滤波器578。由此,能够使正交信号生成部57a的构成简化。
[0340]
在如上所述的第二实施方式中,也可以获得与第一实施方式同样的效果。
[0341]
以上,基于图示的实施方式对本发明的激光干涉仪进行了说明,但是,本发明的激光干涉仪并不限定于上述实施方式,各部的构成能够替换为具有同样的功能的任意的构成。此外,也可以在所述实施方式所涉及的激光干涉仪中增加其它的任意的构成物。而且,本发明的激光干涉仪也可以组合包括上述实施方式的两个激光干涉仪。此外,本发明的激光干涉仪具有的各功能部也可以分割为多个要素,还可以是多个功能部合并为一个功能部。
[0342]
本发明的激光干涉仪除了前述的位移计、测速仪之外,例如也可以适用于振动计、倾斜计、距离计(测长器)等。此外,作为本发明的激光干涉仪的用途,可以列举出可以实现
距离计测、3d成像、分光等的光梳干涉计测技术、实现角速度传感器、角加速度传感器等光纤陀螺仪。
[0343]
此外,激光光源、光调制器以及受光元件中的两个以上也可以载置于同一个基板上。由此,能够在容易实现光学系统的小型化及轻量化的同时,提高组装容易性。
[0344]
此外,上述各实施方式具有所谓的迈克尔逊型干涉光学系统,但是,本发明的激光干涉仪也可以应用于具有其它方式的干涉光学系统、例如马赫-曾德尔型干涉光学系统的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1