一种固体粉末加样方法及系统与流程
1.本发明涉及固相原料加样技术领域,特别涉及一种固体粉末加样方法及系统。
背景技术:
2.化学、生物、环境等相关学科的实验中,有较多种实验过程需要固相原料作为反应物参与化学反应。现有方法是使用分析天平对固相原料进行手动称量,放置于称量纸或称量船后,转移至反应容器。该过程复杂、费时费力,大大增加了实验人员的工作量,实验效率低下,且容易发生实验错误,且称量数据难以追溯。
技术实现要素:
3.本发明提供了一种固体粉末加样方法及系统,其优点是实现快速、高效的固体粉末的定量称量和加样,从而提高化学、生物、环境等相关学科的实验的效率。
4.本发明的技术方案如下:
5.一种固体粉末加样方法,其特征在于,包括以下步骤:
6.s1:将至少两个微量吸头放置在吸头托架上,将实验用的试管放置在试管托架上,将装有固体粉末原料的原料瓶放置在分析天平上;所述微量吸头包括吸样管和设置在吸样管一端的连接口,所述吸头托架用于放置微量吸头,并且微量吸头放置在吸头托架上后连接口朝上,吸样管为圆柱形中空直管,吸样管内放置有与吸样管内壁贴合的滤芯;
7.s2:计算h0=m/(ρ*π*r*r)
8.其中,m为需要称取并加样的固体粉末的质量,ρ为需要加样的固体粉末的经验密度,r为吸样管内壁半径;
9.计算ha=α*h0
10.其中,α为第一步加样系数,且α取值范围为0.5-0.7;
11.s3:调整吸样管内滤芯高度,使吸样管位于滤芯以下部分的高度为ha,并用机械臂带动吸头固定座插入微量吸头的连接口中;所述吸头固定座的底部设置为锥形用于插入到微量吸头的连接口中,所述吸头固定座安装在一个机械臂上,所述吸头固定座连接有吸气管和排气管,所述吸气管和排气管均设有电磁阀;
12.s4:获取分析天平此时的读数m1,机械臂带动微量吸头移动至原料瓶中,并将吸样管的底部插入至原料瓶内的固体粉末中,排气管上的电磁阀关断,吸气管上的电磁阀开通,吸样管吸取固体粉末直至填满吸样管中滤芯以下部分后机械臂带动微量吸头离开原料瓶;
13.s5:获取此时分析天平的读数m2,机械臂带动微量吸头移动至试管上方,排气管上的电磁阀开通,吸气管上的电磁阀关断,将微量吸头中的固体粉末吹入至试管中完成加样;
14.s6:已加样的固体粉末质量ma=m1-m2,则固体粉末的实际堆积密度
15.ρa=ma/(π*r*r*ha)
16.剩余应加样固体粉末质量mb=m-ma,则剩余应加样固体粉末高度
17.hb=mb/(ρa*π*r*r);
18.s7:退去机械臂上吸头固定座上连接的微量吸头,将另一个微量吸头内的滤芯调整至距吸样管底部距离为hb,并用机械臂带动吸头固定座插入该微量吸头的连接口中,排气管上的电磁阀关断,吸气管上的电磁阀开通,吸样管吸取固体粉末直至填满吸样管中滤芯以下部分后机械臂带动微量吸头离开原料瓶;机械臂带动微量吸头移动至试管上方,排气管上的电磁阀开通,吸气管上的电磁阀关断,将微量吸头中的固体粉末吹入至试管中完成加样。
19.进一步的,在步骤s1中,初始时,滤芯置于吸样管内最顶部位置。
20.进一步的,调整滤芯位置时,通过机械臂夹取预设的滤芯推动杆从微量吸头的顶端插入推动滤芯,所述滤芯推动杆的末端具有一个推头。
21.进一步的,在步骤s1中,初始时,滤芯置于吸样管内最底部位置。
22.进一步的,调整滤芯位置时,通过机械臂上的吸头固定端拾取微量吸头,并带动微量吸头移动使得预设的顶杆从底部插入吸样管中推动滤芯,所述顶杆竖直设置。
23.进一步的,α取值0.7。
24.进一步的,在步骤s4和步骤s7中,机械臂带动微量吸头离开原料瓶时,通过预设的摄像头对吸样管的底部进行拍摄,并使用机器视觉识别吸样管的底部是否存在锥型粉末堆积结构,若有,通过机械臂带动微量吸头使吸样管的底部在原料瓶瓶口处水平移动抹除吸样管边缘及底部的固体粉末。
25.进一步的,抹除吸样管边缘及底部的固体粉末后,通过摄像头再次对吸样管的底部进行拍摄,并使用机器视觉识别吸样管的底部是否存在凹陷结构,并计算该结构体积,并将该体积累计到实际加样体积中。
26.进一步的,在步骤s4和步骤s7中,机械臂带动微量吸头离开原料瓶时,通过预设的摄像头对吸样管的底部进行拍摄,并使用机器视觉识别吸样管的底部是否存在锥型粉末堆积结构,并计算锥型粉末堆积结构的体积,并将该体积累计到实际加样体积中。
27.一种固体粉末加样系统,包括工作平台以及至少一个机械臂,工作平台上放置有吸头托架、试管托架以及分析天平,吸头托架上放置至少两个微量吸头,试管托架放置试管,分析天平上放置原料瓶,分析天平一侧设置有摄像头,吸头托架、试管托架以及分析天平均在机械臂的操作范围内,机械臂上安装有吸头固定座以及滤芯推进杆;所述固体粉末加样系统用于执行所述的固体粉末加样方法。
28.综上所述,本发明的有益效果有:
29.1.本发明中,通过微量吸头来吸取定量的固体粉末,定量数值通过滤芯的位置决定,可以灵活调整所需要的定量数值,具有很好的适用性,固体粉末原料通过电磁阀控制吸取和加样,整个过程控制简单,易于高效操作,从而利于提高化学、生物、环境等相关学科的实验的效率;
30.2.本发明中固体粉末的加样通过两步实现,从而减小由于固体粉末堆积密度不同所带来的加样误差,第二步加样时,根据第一步加样所获得固体粉末的实际堆积密度调整所要加样的量,从而使得两次加样量的总和尽可能的靠近目标值,从而在提高定量加样效率的同时,提高定量加样的准确性;
31.3.在取样时,通过摄像头拍摄吸样管底部,并使用机器视觉识别吸样管的底部是否存在锥型粉末堆积结构,在存在上述情况时对多余的固体粉末进行抹除,进一步提高加
样的准确性。
附图说明
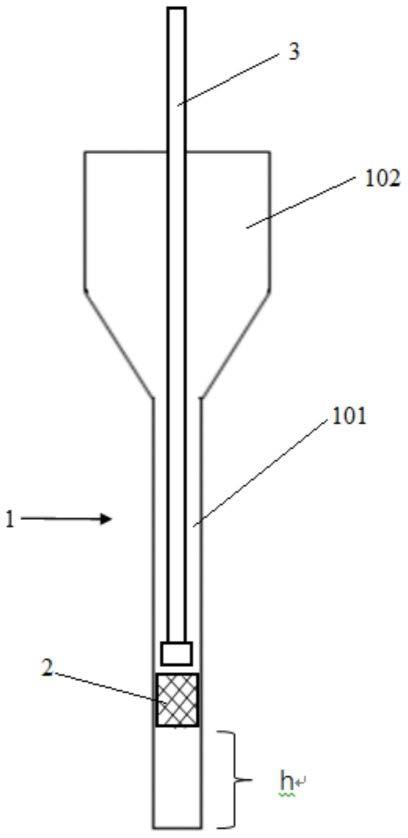
32.图1是本发明中微量吸头的结构示意图;
33.图2是本发明中微量吸头与吸头固定座连接的示意图。
34.图中,1、微量吸头;101、吸样管;102、连接口;2、滤芯;3、滤芯推进杆;5、吸头固定座;6、三通;7、排气管;8、吸气管;9、电磁阀。
具体实施方式
35.下面结合附图详细说明本发明的具体实施方式。
36.实施例一:一种固体粉末加样方法,包括以下步骤:
37.s1:将至少两个微量吸头1放置在吸头托架上,将实验用的试管放置在试管托架上,将装有固体粉末原料的原料瓶放置在分析天平上。如图1所示,所述微量吸头1包括吸样管101和设置在吸样管101一端的连接口102,所述吸头托架用于放置微量吸头1,并且微量吸头1放置在吸头托架上后连接口102朝上,吸样管101为圆柱形中空直管,吸样管101内放置有与吸样管101内壁贴合的滤芯 2。
38.在本实施例中,吸头托架、试管托架以及分析天平放置在同一个工作台上。
39.s2:计算h0=m/(ρ*π*r*r)
40.其中,m为需要称取并加样的固体粉末的质量,ρ为需要加样的固体粉末的经验密度,经验密度为该固体粉末在常规状态下的密度经验值,通常可查阅参考书获得,r为吸样管101内壁半径。
41.h0值表示的是,在固体粉末的密度为经验密度时,通过吸样管101采样所需的物料高度。通常,由于固体粉末易被挤压等特性,固体粉末的实际密度与经验密度不等。
42.计算ha=α*h0
43.其中,α为第一步加样系数,且α取值范围为0.5-0.7;在本实施例中,α取值0.7,则ha=0.7*h0。
44.s3:调整吸样管101内滤芯2高度,使吸样管101位于滤芯2以下部分的高度为ha,并用机械臂带动吸头固定座5插入微量吸头1的连接口102中。调整滤芯2位置时,通过机械臂夹取预设的滤芯2推动杆从微量吸头1的顶端插入推动滤芯2,所述滤芯2推动杆的末端具有一个推头。因此,初始时,滤芯2置于吸样管101内最顶部位置。滤芯2推动杆固定在机械臂上或者在机械臂上设置用于夹持滤芯2推动杆的夹爪。
45.如图2所示,所述吸头固定座5的底部设置为锥形用于插入到微量吸头1 的连接口102中,所述吸头固定座5安装在一个机械臂上,所述吸头固定座5 连接有吸气管8和排气管7,吸头固定座5、吸气管8和排气管7之间通过三通 6连接,所述吸气管8和排气管7均设有电磁阀9;吸气管8用于连接负压装置,排气管7用于连接压缩气体。
46.吸头固定座5和滤芯2推动杆可由同一个机械臂驱动,或各由一个单独的机械臂驱动。所述微量吸头1、分析天平以及试管均在机械臂的操作范围内。
47.s4:获取分析天平此时的读数m1,机械臂带动微量吸头1移动至原料瓶中,并将吸样管101的底部插入至原料瓶内的固体粉末中,排气管7上的电磁阀9 关断,吸气管8上的电
磁阀9开通,吸样管101吸取固体粉末直至填满吸样管 101中滤芯2以下部分后机械臂带动微量吸头1离开原料瓶;机械臂带动微量吸头1离开原料瓶时,通过预设的摄像头对吸样管101的底部进行拍摄,并使用机器视觉识别吸样管101的底部是否存在锥型粉末堆积结构,若有,通过机械臂带动微量吸头1使吸样管101的底部在原料瓶瓶口处水平移动抹除吸样管101边缘及底部的固体粉末。
48.s5:获取此时分析天平的读数m2,机械臂带动微量吸头1移动至试管上方,排气管7上的电磁阀9开通,吸气管8上的电磁阀9关断,将微量吸头1中的固体粉末吹入至试管中完成第一步加样。
49.s6:已加样的固体粉末质量ma=m1-m2,则固体粉末的实际堆积密度
50.ρa=ma/(π*r*r*ha)
51.剩余应加样固体粉末质量mb=m-ma,则剩余应加样固体粉末高度
52.hb=mb/(ρa*π*r*r);
53.s7:退去机械臂上吸头固定座5上连接的微量吸头1,将另一个微量吸头1 内的滤芯2调整至距吸样管101底部距离为hb,并用机械臂带动吸头固定座5 插入该微量吸头1的连接口102中,排气管7上的电磁阀9关断,吸气管8上的电磁阀9开通,吸样管101吸取固体粉末直至填满吸样管101中滤芯2以下部分后机械臂带动微量吸头1离开原料瓶;机械臂带动微量吸头1离开原料瓶时,通过预设的摄像头对吸样管101的底部进行拍摄,并使用机器视觉识别吸样管101 的底部是否存在锥型粉末堆积结构,若有,通过机械臂带动微量吸头1使吸样管 101的底部在原料瓶瓶口处水平移动抹除吸样管101边缘及底部的固体粉末。
54.机械臂带动微量吸头1移动至试管上方,排气管7上的电磁阀9开通,吸气管8上的电磁阀9关断,将微量吸头1中的固体粉末吹入至试管中完成加样。
55.实施例二:一种固体粉末加样方法,与实施例一不同的是,在本实施例中,调整滤芯位置时,通过机械臂上的吸头固定端拾取微量吸头,并带动微量吸头移动使得预设的顶杆从底部插入吸样管中推动滤芯,所述顶杆竖直设置在工作台上。
56.因此,初始时,滤芯置于吸样管内最底部位置。
57.实施例三:一种固体粉末加样方法,与实施例一不同的是,在本实施例中,抹除吸样管边缘及底部的固体粉末后,通过摄像头再次对吸样管的底部进行拍摄,并使用机器视觉识别吸样管的底部是否存在凹陷结构,并计算该结构体积,并将该体积累计到实际加样体积中。
58.实施例四:一种固体粉末加样方法,与实施例一不同的是,在本实施例中,在步骤s4和步骤s7中,机械臂带动微量吸头离开原料瓶时,通过预设的摄像头对吸样管的底部进行拍摄,并使用机器视觉识别吸样管的底部是否存在锥型粉末堆积结构,并计算锥型粉末堆积结构的体积,并将该体积累计到实际加样体积中。
59.实施例五,一种固体粉末加样系统,包括工作平台以及至少一个机械臂,工作平台上放置有吸头托架、试管托架以及分析天平,吸头托架上放置至少两个微量吸头,试管托架放置试管,分析天平上放置原料瓶,分析天平一侧设置有摄像头,吸头托架、试管托架以及分析天平均在机械臂的操作范围内,机械臂上安装有吸头固定座以及滤芯推进杆;所述固体粉末加样系统用于执行实施例一中所述的固体粉末加样方法。
60.以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员
来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1