一种基于螺旋航线的无人机机载雷达扫描方法与流程
1.本发明涉及无人机机载激光雷达领域,具体为一种基于螺旋航线的无人机机载雷达扫描方法。
背景技术:
2.测绘激光雷达是将激光遥感、光学技术、全球导航卫星系统(global navigation satellite system,gnss)及惯性导航(ins)等技术集成为一体的新型测绘传感器,较于传统测绘设备而言,激光扫描具有穿透性强、灵活性高、解算时间短、精度高等优势,通常可将其搭载在飞行器上。采用无人机搭载测绘激光雷达,可快速对地面进行扫描,解算时无需空中三角点加密过程,能够高效获取海量地面三维坐标点,通过对此类数据进行二次生产,可获得数字高程模型(dem)、数字表面模型(dsm)及真彩点云等关键测绘数据,从而快速获取大范围、高密度的地表三维点云数据,为此无人机搭载测绘激光雷达已被广泛应用到自然资源调查监测、电网巡线、公路勘测、应急测绘等领域。
3.通常利用无人机搭载激光雷达进行项目作业时,常使用“弓”形航线、“井”形航线对测区内的地物进行扫描,采用“弓”形航线可快速获取地面地物的点云数据,但会由于航线重叠率及机载激光雷达扫描角度固化的影响,导致存在一定的扫描盲区及地物细节丢失的问题。而采用“井”字形航线虽可弥补“弓”形航线的缺点,但其存在作业效率低、点云冗余等问题,为此,亟需一种既能较完整表达地物细节又能提高作业效率的航线方法。
技术实现要素:
4.鉴于现有技术中所存在的问题,本发明公开了一种基于螺旋航线的无人机机载雷达扫描方法,以提供一种顾及地物精细化扫描并提高作业效率的机载激光雷达飞行路线的航线法,其可有效解决传统航线法存在的扫描盲区和飞行效率低下等问题。
5.本技术方案包括以下步骤:步骤1,飞行作业前期准备根据已有测区相关资料对已有的无人机及机载雷达设备的性能进行评估,判断飞行环境能够满足无人机飞行条件;步骤2,航线规划设置设置相关航线参数;其中的航线设置采用螺旋航线;步骤3,点云数据处理结合点云数据,对目标区域进行扫描航飞作业得到激光雷达点云成果图。
6.作为本发明的一种优选技术方案,所述步骤1中,要评估的飞行条件有海拔、气象条件、禁飞区,以确保飞行环境安全并符合规章制度。
7.作为本发明的一种优选技术方案,所述步骤2中,与无人机有关的参数有:航线高度、航线重叠度和无人机飞行速度,参数设定好后,无人机即可按照设定参数进行航行扫描。
8.作为本发明的一种优选技术方案,所述航线高度结合地形条件,激光雷达的综合性能、点云密度和精度的要求进行判断,其中激光雷达综合性能中的工作功率与机载雷达最大飞行作业高度、最大测距范围的关系可采用如下公式进行表达:f=a*e
bx
式中f为机载雷达工作频率,其单位为khz;a和b为指数系数;x为最大飞行作业高度,其单位为m;而本公式中的最大测距范围的单位为m。通过上述公式即可得到机载雷达的工作频率。
9.作为本发明的一种优选技术方案,所述航线重叠度大于50%,以确保扫描信息的完整。
10.作为本发明的一种优选技术方案,所述步骤2中,航线设置中拐点的个数计算公式如下:式中,n为拐点个数,l为航线长,d为航线间隔。通过该公式即可得到扫描航线中拐点的数量。
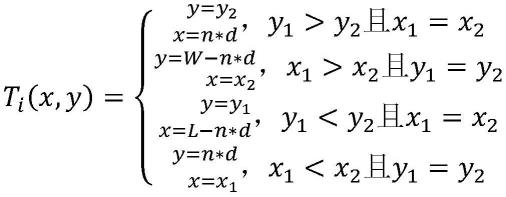
11.作为本发明的一种优选技术方案,为求下一个拐点坐标ti,现设下一个拐点未知坐标为ti(x,y),未知拐点t前两个拐点坐标分别为t1(x1,y1)、t2(x2,y2),设初始点为a点,以a点作为原点,其后续三个拐点分别为b、c、d,则b、c、d坐标分别为b(0,w)、c(l,w)、d(l,0),其中w为航线宽度,拐点坐标计算公式如下:式中i与n均为整数,i≥4,n≥1;将各点坐标代入拐点坐标计算公式即可得到下一个拐点坐标,并不断将未知点转换成已知点进而不断迭代得到各拐点坐标,最后将各拐点坐标进行连线,就可得到螺旋航线。
12.本发明的有益效果:本发明通过采用螺旋航线法一定程度上解决了“弓”形航线法存在的扫描盲区导致地物细节丢失的问题,同时相较于“井”形航线具有更高的作业效率,且点云大幅精简,效率更高。
附图说明
13.图1为机载激光雷达工作示意图;
14.图2为“弓”形航线示意图;
15.图3为“井”形航线示意图;
16.图4为本发明螺旋航线示意图;
17.图5为本发明螺旋航线参数示意图。
具体实施方式
18.实施例1
19.机载激光雷达工作原理是根据激光脉冲信号从发射到返回到传感器的传播时间以确定激光扫描仪到地物点的距离。为获取地面点三维坐标需要机载雷达所携带的ins提供3个重要的姿态参数:倾滚角(ω)、倾斜角方向角(σ),结合gnss提供的激光扫描仪中心点坐标(x0,y0,z0),再结合激光扫描仪中心点位置到地面点距离d,并将上述参数代入三维坐标计算公式即可得到地物点三维坐标(x,y,z),三维坐标计算公式如下,为姿态参数的转换矩阵:机载雷达的工作示意图如图1所示,从图中可看出,机载雷达的有效测量范围呈现为圆锥形,在无人机飞行过程中,激光雷达会沿着飞行路线对地面信息进行扫描,从而获取地面各地物的三维坐标信息。由于机载雷达扫描特性的原因,机载雷达与航线垂直的地物面会存在一定的扫描盲区,为此采用如图2所示的“弓”形航线时,会丢失与航向垂直的地物空间信息,因此若想获取较完整的地面空间信息,则需要采用如图3所示的“井”形航线对测区进行扫描,但此类方法作业效率较低。
20.如图4、图5所示,本发明公开了一种基于螺旋航线的无人机机载雷达扫描方法,采用的技术方案是,包括以下步骤:
21.步骤1,飞行前期准备首先进行测区初勘,对测区周边地形进行初步勘测,收集周围地形地貌信息及测区附近重要设备和交通信息,为无人机起飞、降落、航线规划提供资料;其次进行飞行环境勘察,在飞行前需根据已有测区相关资料对已有的无人机及机载雷达设备的性能进行评估,判断飞行环境能够满足无人机飞行条件,主要需要评估如下条件:1)海拔:无人机飞行作业高度应大于测区内地物最高高度;2)气象条件:地面的风向决定无人机起飞和降落的方向,空中的风向对飞行平台的稳定性影响很大,因此需对风向风力进行评估,为保证精度尽量在风力较小时进行飞行作业;3)禁飞区:在无人机作业前,需查询当前作业区域是否为禁飞区同时需要对项目作业区域进行空域申请,得到批准后方可起飞作业。评估完成后,进行设备检校:在进行飞行作业前,需对各设备进行检查如航测相机和机载雷达的性能检测,无人机电池的电量及各部件间的连接是否正常。
22.步骤2,航线规划设置在确定项目作业范围后,为最大限度获取地面空间信息,需设置相关的参数,其中与无人机有关的参数有:航线高度、航线重叠度和无人机飞行速度;1)飞行作业高度的确定:飞行作业高度应充分考虑测区范围内的地形条件,顾及激光雷达的综合性能,如激光有效测量范围、最大扫描角度和激光点频等,同时还需综合考虑点云密度和精度的要求,其中激光雷达的工作功率与机载雷达最大飞行作业高度、最大
测距范围的关系可采用如下公式进行表达:f=a*e
bx
式中f为机载雷达工作频率(单位:khz),e为指数函数,a和b为指数系数,x为最大飞行作业高度(单位:m)、最大测距范围(单位:m);式中的指数系数a和b根据不同的反射率具有不同的值,具体如表1所示:表1指数系数a和b取值表2)航向重叠度的确定:为最大限度获取地物空间几何信息降低扫描盲区,航向旁重叠度设置大于50%,同时机载雷达上会配备航测相机,该相机可为后续的点云赋色及生成dom提供影像资料;3)飞行速度的确定:飞行速度应顾及所使用的机载激光雷达的性能、飞行高度、项目对精度的需求、项目区域地形起伏情况及无人机性能等参数确定;此外,在整个作业过程中,飞行速度应保持一致;同时按照国家现有规范,在同一航线内,无人机爬升及降落速率不应超过10m/s;4)航线设置:在确定测区范围后,采用螺旋航线对作业区域进行全覆盖,如图5所示,其中航线宽为w,长为l,航线间隔为d,则整个航线的拐点个数n为:为求下一个拐点坐标ti,现设下一个拐点未知坐标为ti(x,y),未知拐点t前两个拐点坐标分别为t1(x1,y1)、t2(x2,y2),设初始点为a点,以a点作为原点,其后续三个拐点分别为b、c、d,则b、c、d坐标分别为b(0,w)、c(l,w)、d(l,0),其中w为航线宽度,拐点坐标计算公式如下:式中i与n均为整数,i≥4,n≥1;将各点坐标代入拐点坐标计算公式即可得到下一个拐点坐标,并不断将未知点转换成已知点进而不断迭代得到各拐点坐标,最后将各拐点坐标进行连线,就可得到螺旋航线。
23.步骤3,点云数据处理当前机载雷达定位的方式主要有gnss ppk(post processed kinematic)和rtk(real-time kinematic)两种定位方式,rtk定位需要基准站与移动站建立实时通讯,而ppk
则是采用事后数据处理,基准站与接收机间无需建立实时通讯,为此机载激光雷达常用gnss ppk进行定位。采用gnss ppk定位方式外业主要工作有:将基准站架设在已知点上,严格对中整平,设置基准站接收机采样率为1s,若在作业过程中基准站因倾斜、关机或者遮挡出现卫星失锁的情况,则需要重新初始化,开启静态模式5min后再启动无人机。内业主要工作为:采用软件拷贝gnss接收机采集的静态数据及惯导数据,随后建立测量工程对应的坐标系统,并设置相应参数,具体包括参考椭球、基准转换模型、似大地水准面模型、投影参数等;输入基准站在当前坐标系下的坐标,并设为固定基准,然后进行基线处理,便可解算出各个流动站观测点的空间三维坐标成果,同时需检查无人机飞行轨迹是否有异常,最后对滤波进行设置从而得到处理完毕后的点云数据,表1为“弓”形航线、“井”形航线和螺旋航线法对同一区域进行扫描所需的航线长度及航飞作业时间,并统计某区域内的点云个数,结果如表2所示:表2各航线法对同一区域扫描的航线长度与作业时间从中可看出,螺旋航线较于“井”形作业效率提高了47%,同时在与“弓”形航线拥有相近的航线长度、航飞作业时间和作业效率的同时,能够获得比“弓”形航线更加完善、准确的地物信息。
24.上述虽然对本发明的具体实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本发明的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1