一种红外高灵敏度成像探测方法和星载红外相机
1.本发明属于红外成像与探测技术领域,特别是涉及一种红外高灵敏度成像探测方法和星载红外相机。
背景技术:
2.目前,现代红外成像系统的核心器件是焦平面阵列,随着人类对遥感领域需求的不断提升,特别是对高时间分辨率、高空间分辨率、高灵敏度、高光谱分辨率的追求,进一步带动了红外焦平面器件在性能、规模、成像速度上的飞速发展。
3.近几年,随着遥感技术的发展,对弱小目标红外成像探测的需求也不断提升。为了提升对弱小目标的探测和识别能力,即提升辐射分辨能力,红外相机在光学口径上不断增加,应用于空间遥感领域的单个反射镜最大尺寸已经达到了4米,限于加工工艺和空间应用环境,难以再进行单镜尺寸的提升;而现阶段国际上一般采用的方式是利用小镜片拼接产生更大口径的望远镜来提高灵敏度,典型的设计如已发射入轨的jwst(詹姆斯韦伯望远镜),但这种方法对加工、安装、装调技术要求极高,也对后处理提出更多的要求。
4.现有红外探测器在规模急剧膨胀,当前国内外星载红外相机中,已逐渐应用了大规模的红外线阵探测器或者面阵探测器,线阵探测器规模达到了2000元以上,单个面阵探测器规模超过了1k
×
1k个像元,最高帧频已超过了50帧。国外的jwst(詹姆斯韦伯望远镜)更是采用了18片4k
×
4k的红外探测器。由此带来对探测器信息获取速度提升需求。但帧频越快,积分时间越短,而探测器量子效率一定,则信噪比的提升愈难。
5.通过上述分析,现有技术存在的问题及缺陷为:传统提高星载红外相机灵敏度的方法包括增加光学口径、筛选量子效率高的探测器、增加观测积分时间等,这些方法都存在着各方面因素的制约,对系统灵敏度的进一步提高产生限制。
6.对于增加光学口径的方法,由于运载火箭整流罩的包络限制,相机光学口径不可能无限增加,大口径光学组件受自身重力、温度场不均匀、多点支撑应力等影响会产生表面形变,导致离焦、畸变恶化,进而影响成像质量,对系统光学和支撑结构设计带来极大的困难;此外口径增大势必带来重量体积急剧增加,对平台的资源需求也迅速增加,而运载火箭对不同轨道的运载能力是有限的;另一方面,制造成本也会随着光学口径的增大而急剧增加,降低经济效益。近年来利用主动光学技术和小镜片拼接制作大口径镜头进行性能提升,但受一致性、安装精度、平台构型布局等限制,性能提升空间有限。
7.对于筛选量子效率高的传统红外探测器,虽然可以提高信噪比,然而传统红外探测器量子效率基本维持在一个常数,很难进一步提升,通过筛选只能找出噪声略低、响应率略大的探测器模块,在积分时间一定下对信噪比的提升很有限,无法满足短积分时间高帧频快速成像需求。
8.对于增加观测积分时间的方法,虽然可以提高信号强度,但同时也会累积噪声,例如探测器的暗噪声,空间粒子打在探测器上激发电子产生噪声,以及仪器自身的红外背景等,且在目标高速运动场合下,长积分时间导致帧频降低,无法实现目标在能量维度上的有
效积累。此外在光机扫描成像场合,积分时间直接受限于光机扫描成像周期,系统时空分辨率确定后,积分时间无法延长,也制约了信噪比提升的空间。
9.解决以上问题及缺陷的难度为:对弱小目标红外成像探测领域,从点源信噪比的公式可知,在应用环境(高度)传统提高星载红外相机灵敏度的方法或者手段很有限,传统探测器量子效率基本趋于一常数,通过探测器筛选只能有限提升信噪比,却难以大幅度提升信噪比,而且筛选的效能是有限的;拉长积分时间能有效提升信噪比,但应用场合存在差异,在短积分时间高帧频成像场合无法有效提升信噪比;最常用的是通过增加光学口径,提升集光能力来增强信号,以达到提高信噪比的目的。而增大口径,很难兼顾资源、安装精度、真空热环境下结构形变高精度控制等需求,信噪比也很难有数量级的提升。因此,对一个应用环境确定的红外探测系统,对信噪比有效提升,从而实现高灵敏度探测,是非常艰难的,现有技术只能少量提升且代价巨大、存在短板上限。
技术实现要素:
10.为了克服上述问题,本发明提供了一种红外高灵敏度成像探测方法和星载红外相机,通过对高灵敏度红外相机的设计分析,基于线性高增益红外探测器组件、光学组件、信息获取处理一体化自主模块,有效解决弱小目标成像探测需求下,为提高信噪比,光学口径不断增大进而导致成像系统体积和重量不断增加,使现有平台无法适应的问题,避免了不断重复设计和重新试验验证的问题,实现了相同信噪比下的系统小型化或相同光学口径下的系统信噪比极大提升,解决了弱小目标红外成像探测领域中为提高仪器性能,进一步增加光学口径带来的资源需求与星载平台所能提供资源的失配问题。
11.本发明所采用的技术方案是:
12.一种红外高灵敏度成像探测方法,包括以下步骤:
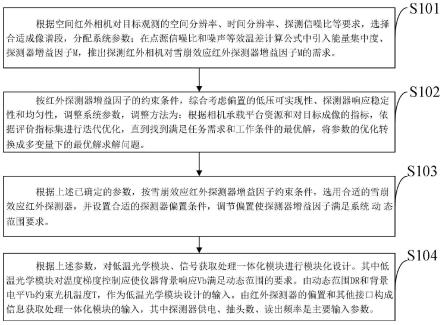
13.步骤一,根据空间红外相机对目标观测的空间分辨率、时间分辨率、探测信噪比的要求,选择成像谱段,分配系统设计参数;在点源信噪比公式中引入能量集中度ρ、探测器增益因子m,假定需要达到的信噪比为snr
sys
,推出目标探测红外相机对雪崩效应红外探测器增益因子m的需求;
[0014][0015][0016]
在噪声等效温差公式中引入增益因子m,衡量对地观测红外相机的性能,得出对红外探测器增益因子m的需求;
[0017]
[0018][0019]
式子中:
[0020]
δ:信号过程因子;τa:大气透过率,τo:光学效率,j:目标辐射强度;
[0021]
f:系统f数,ω:系统瞬时视场立体角,do:系统光学孔径;ρ:目标能量集中度;η:目标能量集中度;d
*
:非雪崩效应倍增模式探测器波段探测率,δf系统噪声等效带宽;snr:信噪比,netd:噪声等效温差;
[0022]
系统f数:f=f/d0,若定义相机空间角分辨率为θ,则有:
[0023][0024]
f是相机焦距,a为探测器面积;
[0025]
进一步,以信噪比snr和噪声等效带宽netd表示的增益因子分别为:
[0026][0027][0028]
步骤二,按红外探测器增益因子的约束条件,在倍增模式下成像探测,综合考虑偏置的低压可实现性、探测器响应稳定性和均匀性,线性模式下增益因子m一般取10-20为成像应用场合的最佳范围,若m超过20,则调整系统参数,;
[0029]
步骤三,根据上述已确定的参数,按雪崩效应红外探测器增益因子约束条件,选用合适的雪崩效应红外探测器,并设置合适的探测器偏置条件,由于偏置与探测器增益因子呈正相关,但会影响动态范围,因此调节偏置使探测器增益因子满足系统要求,兼顾动态范围的需求,对动态范围的影响在步骤二中主要涉及系统噪声的计算,而有效信号范围由下式决定:
[0030]vref
+δv≤v
sat
[0031][0032]
因此偏置电压的选择除了满足增益因子的需求外,还应满足:
[0033][0034]
式中v
ref
为偏压;av为探测器前放增益,一般为60db以上;t
int
为积分时间,c
int
为积分电容;
[0035]
步骤四,根据上述参数,对低温光学模块、信号获取处理一体化模块进行模块化设计;其中低温光学模块对反射镜/透射镜的温度梯度控制应该满足动态范围的需求,使仪器背景响应vb满足动态范围的要求;
[0036][0037]
采用普朗克公式计算仪器内部处于探测器视场里的部件的光谱辐亮度l(λ,t),单位为w/m2/sr/μm。
[0038][0039]
h为普朗克常数,6.626
×
10-34j·
s,k为玻尔兹曼常数,1.3807
×
10-23j·
k-1
,ε为发射率,λ为波长。通过对光谱辐亮度l(λ,t)在光谱[λ1,λ2]上的积分,然后与像元通过探测器杜瓦窗口向外的视场张角θ
det
、探测器像元面积ad相乘,转换成入射到探测器像面上的仪器背景光功率p0,则vb的取值为
[0040][0041]
由动态范围dr和背景电平vb约束光机温度t,作为红外相机的低温光学模块设计的输入;
[0042]
由雪崩效应碲镉汞红外探测器的偏置和供电、时序、配置、信号接口构成信息获取处理一体化模块的输入,其中探测器供电、探测器抽头数、读出频率是主要输入参数。
[0043]
其中,步骤二中调整系统参数的方法为:根据相机承载平台资源和对目标成像的指标,依据评价指标集进行迭代优化,直到找到满足任务需求和工作条件的最优解,将参数的优化转换成多变量下的最优解求解问题;
[0044]
评价集选取对红外成像系统影响最大的指标,定为信噪比snr、系统噪声等效温差netd和动态范围dr;snr和netd的公式见步骤一,动态范围dr为系统有效信号幅值范围与系统噪声的比值,由于探测器是源头输出,因此可用探测器输出的信号幅值作为分子,以电子学通道增益为1时的系统耦合噪声作为分母,在各噪声分量不相关的情况下,可计为:
[0045][0046]
其中,v
sat
为探测器饱和输出电压,+3.3v-+3.6v供电探测器的典型值为2.5v;vd为探测器输出的直流本底信号,与工作偏压设置相关;vb为仪器背景的本底信号,受仪器温度场和信息获取电路影响;v
nd
为暗电流散弹噪声;v
nr
为探测器读出电路噪声;v
nt
为探测器等效负载电阻热噪声;v
np
为光生电流散弹噪声;v
nc
为信息获取电路噪声,理想情况下与探测器读出电路噪声等相比较小,一般可忽略不计;
[0047]
进一步,,读出电路噪声v
nr
包括输出级运放噪声、电源噪声、采保电路噪声、复位噪声等,与光生电流i
p
、暗电流id、增益因子m无关;式中:k为波尔兹曼常数,q为电子电量(1.6
×
10-19
库伦);td为环境温度(k),r
eq
为等效负载电阻;δf为带宽;t
int
为积分时间,c
int
为积分电容;id为暗电流,i
p
为光生电流,包括信号光电流和仪器背景光电流;f(m)为雪崩效应过剩噪声因子,定义为器件输入信噪比(没有雪崩效应时器件的信噪比)和输出信噪比的比值;则m的取值除了需要满足步骤1,还需要满足动态范围的约束:
[0048][0049]
进一步,根据上述三个主要评价指标,按任务需求分优先级进行排序,再分析这些评价指标中、涉及参数的改变对整个系统工作性能所产生的影响,找出需要优化的参数,当参数的调整超过可设计/加工/测试的边界时,适当调整m,以此类推,调整迭代参数,直到收敛到满足可制造性下的系统指标。
[0050]
进一步,分析公式中的可调参数分析,信号过程因子δ对于凝视成像型红外相机取1,对光机扫描型红外相机取0.667,大气透过率τa对于确定谱段的相机可视为确定值,在光学系统构型和镜片数量确定后,光学效率τo也是确定值,目标辐射强度j是确定值。则可优化的相机配置参数包括相机口径d0,探测器像元面积ad、噪声等效带宽δf/积分时间t
int
(对于扫描系统对于凝视系统)、光学系统f数、增益因子m、过剩噪声因子f(m)共6个参数。
[0051]
本发明还提供一种实施红外高灵敏度成像探测方法的星载红外相机,包括工作在线性倍增模式下的雪崩效应碲镉汞红外探测器模块、低温光学模块、定标模块、信号获取处理一体化模块;
[0052]
所述的低温光学模块包括反射镜或透射镜组成的光学组件、光阑组件、结构支撑、传热热管、辐射板组件、测控温组件,结构支撑和光阑组件通过传热热管连接到辐射板组件,辐射板组件对外空间辐射散热,从而使整个光学组件达到预定低温条件下的热平衡,测控温组件用于温度监控和加热补偿;
[0053]
所述的定标模块包括星上黑体、驱动电机,星上黑体同挡光板一体化设计,驱动电机用于黑体挡板的打开和关闭,挡板打开时对地观测成像,挡板关闭时,对挡板加热控温,进行黑体数据采集;
[0054]
信息获取处理一体化模块包括低噪声供电电路、可调谐探测器偏置电路、时序发生和探测器配置电路、多路信号调理和采集电路、红外背景智能化抑制电路、信息处理和传输电路。
[0055]
其中,低噪声供电电路采用源头集总、分支独立的设计方式,集中提供所有电路的供电,包括探测器的低噪声供电;每个分支根据负载情况的差异,设置大功率开关电源供电、低压差线性稳压供电、低噪声小功率供电;大功率开关电源供电经二次滤波后提供给负载。
[0056]
其中,可调谐探测器偏置电路包括精密电压参考基准、高精度电流型da转换器、多路低噪声运放;由da转换器接收输入的数字信号进行数模转换,接着经过低噪声运放进行i-v变换后输出偏置电压,提供给探测器。
[0057]
其中,时序发生和探测器配置电路以fpga为核心器件,包括大规模fpga、接口逻辑器件,用于对探测器进行时序驱动和参数配置,包括积分电容、积分时间。
[0058]
其中,多路信号调理和采集电路包括多路低噪声前置运放、多路低噪声差分运放、高精度高速ad转换器。
[0059]
其中,红外背景智能化抑制电路包括大规模fpga、精密电压参考基准、高精度电流型da转换器、高精度高速ad转换器、多路低噪声运放、第一存储器、第二存储器;fpga、高精度高速ad转换器同多路信号调理和采集电路共用;红外相机定期对星上黑体自动进行数据采集和计算,当前后两次相同温度下的定标数据,响应均值差异超过10%或图像非均匀性超过5%时,启动冷空间背景更新,并重新定标;通过高精度高速ad转换器获取冷空间仪器背景数据,并存储到第一存储器,在成像观测时,将背景数据送da转换器恢复出来,送前端进行减背景操作,残差背景送第二存储器,在数字端进行二次减法运算。
[0060]
其中,信息处理和传输电路包括大规模fpga、第三存储器、第四存储器、高速收发接口电路,fpga同多路信号调理和采集电路、红外背景智能化抑制电路共用;fpga产生相机所有时序,并获取图像数据进行非均匀性校正、几何校正、数据计算的工作,第三存储器存储中间运算过程数据,第四存储器存储程序,高速收发接口电路用于接收指令和参数,传输图像数据。
[0061]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明能够较为便捷的实现小口径下的信噪比较大的提升,最终能以较小的体积和重量的红外相机实现高灵敏度成像和探测;或者保持光学口径不变的情况下实现观测灵敏度数量级的提升。该发明能有效解决高辐射分辨率要求下的红外相机光学口径不断增大的难题,在有限资源约束下能极大提升成效效能,提升了平台的利用率,解决了成像探测性能提升与资源需求的矛盾,特别是在气象卫星、陆地观测卫星、海洋观测卫星、深空探测、小行星防御等成像探测相关领域能发挥重大作用;对观测成像红外相机而言,具有良好的扩展能力,可推广应用在星载、机载等平台,通过多平台拼接视场,进行大视场高灵敏度探测。
[0062]
将本发明的技术方案应用于基于线列红外探测器的光机扫描型红外相机中,满足数据采集要求,且获得了良好的应用效果。采用512元雪崩效应线列红外探测器,在线性倍增模式下,50mm口径的红外相机达到了150mm口径红外相机的辐射分辨率,与传统增加口径的设计方法相比,本发明的应用效果明显。应用结果表明,该方法满足了高灵敏度成像探测的需求,具备良好的扩展性,适合应用于高帧频凝视的空间红外相机中,也可应用于采用光机往复扫描的空间红外相机中,有利于遥感技术的进一步发展。
附图说明
[0063]
图1是本发明实施例提供的一种红外高灵敏度成像探测方法流程图。
[0064]
图2是本发明实施例提供的高灵敏度星载红外相机结构图。
[0065]
图2中:1、雪崩效应红外探测器模块/组件;2、低温光学模块;3、光学组件;4、光阑组件;5、结构支撑;6、传热热管;7、辐射板组件;8、测控温组件;9、定标模块;10、星上黑体/挡板;11、驱动电机;12、信号获取处理一体化模块;13、低噪声供电电路;14、可调谐探测器偏置电路;15、时序发生和探测器配置电路;16、多路信号调理和采集电路;17、红外背景智能化抑制电路;18、信息处理和传输电路。
具体实施方式
[0066]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0067]
针对现有技术存在的问题,本发明提供了一种红外高灵敏度成像探测方法和高灵敏度星载红外相机,下面结合附图对本发明作详细的描述。
[0068]
本发明提供的红外高灵敏度被动成像探测方法和高灵敏度星载红外相机,普通技术人员还可以采用其他的步骤实施,图2的本发明提供的高灵敏度星载红外相机仅仅是一个具体实施例而已。
[0069]
实施例1
[0070]
根据应用需求,对工作轨道h=3000km,对地观测地面分辨率r=300m,对地物探测工作波段3.20-4.20um相机进行配置参量优化,要求相机工作性能:帧频大于1帧/秒,snr≥100,dr≥1000,netd≤0.5k。
[0071]
本发明提供了一种红外高灵敏度成像探测方法,设计步骤如下。
[0072]
第一步:根据空间红外相机对目标观测的空间分辨率、时间分辨率、探测信噪比等要求,成像谱段3.50-4.20μm,分配系统设计参数,需要达到的信噪比为snr
sys
≥100,根据步骤一,可以推出红外相机对雪崩效应红外探测器增益因子m的需求为:m≥14,取m=15。
[0073]
列出的表如下:
[0074]
表1初步系统设计参数
[0075]
[0076][0077]
第二步:为了能在倍增模式下成像探测,综合考虑偏置的低压可实现性、探测器响应稳定性和均匀性,线性模式下增益因子m一般取10-20为成像应用场合的最佳范围,若m超过20,则调整系统参数,调整方法为:根据相机承载平台资源和对目标成像的指标,依据评价指标集进行迭代优化,直到找到满足任务需求和工作条件的最优解,将参数的优化转换成多变量下最优解求解问题。
[0078]
此处m取15能够满足需求,根据下式可计算出动态范围能达到1100:1,其中电子学噪声需要满足:v
nc
≤0.1mv,与探测器读出电路噪声等相比较小,可忽略不计。
[0079][0080]
经过计算比较,相机口径d0,探测器像元面积ad、噪声等效带宽δf/积分时间t
int
、光学系统f数、增益因子m、过剩噪声因子f(m)等主要参数可以保持步骤一中的设计值,不进行调整。
[0081]
步骤三,根据上述已确定的参数,按雪崩效应红外探测器增益因子约束条件,选用512
×
8的雪崩效应红外探测器,并设置探测器偏置条件v
ref
=1.15v。
[0082]
步骤四,对低温光学模块、信号获取处理一体化模块进行模块化设计。其中低温光学模块对反射镜/透射镜的温度梯度控制区间为[200k,210k],信号获取处理一体化模块输入接口为512
×
8探测器接口,探测器采用+3.3v供电,抽头数为4,读出频率10mhz,据此设计信号调理电路接口。
[0083]
实施案例2
[0084]
本发明的另一目的在于提供一种实施红外高灵敏度被动成像探测方法的星载红外相机,高灵敏度成像探测红外相机包括工作在线性倍增模式下的雪崩效应碲镉汞红外探测器模块、低温光学模块、定标模块、信号获取处理一体化模块。结合方法应用在红外相机的实施案例如下:
[0085]
1)光学口径100mm,焦距400mm的推扫型红外相机,采用512
×
8的雪崩效应碲镉汞中波红外探测器模块,增益因子为10。
[0086]
2)所述低温光学模块包括离轴三反镜片和转折平面镜、内部次镜光阑、殷钢结构支撑、双槽道传热热管、osr辐射板组件(面积1平方米)、32路测控温,结构支撑和光阑组件通过传热热管连接到辐射板组件,osr辐射板组件对外空间辐射散热,从而使整个光学组件达到200k低温条件下的热平衡,测控温组件用于温度监控和加热补偿。
[0087]
3)所述定标模块包括星上黑体、驱动电机。星上黑体同挡光板一体化设计,驱动电机用于黑体挡板的打开和关闭,挡板打开时对地观测成像,挡板关闭时,对挡板加热控温,进行黑体数据采集。黑体控温点可通过指令上注调整,默认为20℃。
[0088]
4)所述信息获取处理一体化模块包括:低噪声供电电路、可调谐探测器偏置电路、时序发生和探测器配置电路、多路信号调理和采集电路、红外背景智能化抑制电路、信息处理和传输电路。
[0089]
进一步,低噪声电路采用源头集总、分支独立的设计方式,采用dvtr2805sf、dvhf2815df对平台提供的+28v电源进行转换,集中提供相机所有电路的供电,包括探测器的低噪声供电+3.3v;每个分支根据负载情况的差异,设置大功率开关电源供电(rss0508h)、低压差线性稳压供电(rhf4913)、低噪声小功率供电(lw5101-00);大功率开关电源供电经二次滤波后提供给负载。
[0090]
进一步,可调谐探测器偏置电路包括精密电压参考基准ltc6655、高精度电流型da转换器ad5542、多路低噪声运放lm6142。由所述da转换器接收输入的数字信号进行数模转换,接着经过低噪声运放lm6142进行i-v变换后输出偏置电压,提供给探测器。
[0091]
进一步,时序发生和探测器配置电路以fpga为核心器件,包括大规模fpga、接口逻辑器件,用于对探测器进行时序驱动和参数配置,包括积分电容、积分时间等。fpga采用xilinx公司的7系列fpga xc7k325t-ff900i。
[0092]
进一步,多路信号调理和采集电路包括多路低噪声前置运放ad8042、多路低噪声差分运放ad8138、高精度高速ad转换器ad6445。
[0093]
进一步,红外背景智能化抑制电路包括大规模fpga xc7k325t-ff900i、精密电压参考基准ltc6655、高精度电流型da转换器ad5542、高精度高速ad转换器ad6445、多路低噪声运放lm6142、第一存储(3dplus公司的sdram 3dsd1g32vs2490)、第二存储器(3dplus公司的sdram 3dsd1g32vs2490)。所述fpga、高精度高速ad转换器同多路信号调理和采集电路共用。红外相机定期对星上黑体自动进行数据采集和计算,当前后两次相同温度下的定标数据,响应均值差异超过10%或图像非均匀性超过5%时,启动冷空间背景更新,并重新定标。通过高精度高速ad转换器获取冷空间仪器背景数据,并存储到第一存储器,在成像观测时,将背景数据送da转换器恢复出来,送前端进行减背景操作,残差背景送第二存储器(3dplus公司的sdram 3dsd1g32vs2490),在数字端进行二次减法运算。
[0094]
进一步,信息处理和传输电路包括大规模fpga(xc7k325t-ff900i)、第三存储器(3dplus公司的sdram 3dsd1g32vs2490)、第四存储器(3dplus的flash3dfo256m16vs4269)、高速收发接口电路(ti公司的tlk2711),所述fpga同多路信号调理和采集电路、红外背景智能化抑制电路共用。fpga产生相机所有时序,并获取图像数据进行非均匀性校正、几何校正、数据计算等工作,第三存储器存储中间运算过程数据,第四存储器存储程序,高速收发接口电路用于接收指令和参数,传输图像数据。
[0095]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1