一种柔性阵列压力传感器及其制备方法
1.本发明涉及压力传感器技术领域,特别是涉及一种柔性阵列压力传感器及其制备方法。
背景技术:
2.近年来,人们在智能机器人操作技术领域取得了长足的发展,但实现精细的机器人灵巧操作仍是一项极具挑战性的难题。主要原因是机器人缺少像人一样的高灵敏触觉感知,从原理上限制了环境感知与精细操作的能力与精度。
3.从现状调研来看,为获取机器人对物体的抓取、操作任务过程中的接触信息,测量方式主要包括基于机器人腕关节扭矩与动力学建模的接触力间接解算以及基于敏感材料与微电子技术的接触力直接测量两种:目前利用机器人现有的关节扭矩传感器和动力学模型处理接触问题的方法在商业机械臂中广泛应用,但存在明显的局限性,其末端接触力的解算受到机器人实时运动过程中速度与加速度的影响,无法获得准确的力与接触状态信息及参数。基于柔性敏感材料与微机电技术的力测量,根据不同的信号转换机制与结构设计,不仅可以实现力参数的获取,并可结合柔性设计,使其具备弹性与表面适应性,将其部署于机器人末端操作器以获取力感知信息,在机器人灵巧操作领域有着极大的研究价值与应用前景。因此,如何实现柔性高灵敏力觉测量,是目前力传感器结构设计与制备方法研究的重点。
4.为了实现基于柔性敏感材料的高灵敏力测量,研究学者们提出了多种柔性敏感介质的微结构设计,如微金字塔(micropyramid)、微针/微柱(microneedle/micropillar)、微穹顶(microdome)、微孔(microporous)等。然而,现有的介质微结构的制备受到制备工艺的成本限制,使得柔性高灵敏力测量难以在机器人末端操作实现广泛的应用。如微金字塔、微针/微柱和微穹顶结构需要采用光刻法制备异性硅模具,其设备成本高、制备过程复杂,增加了微结构介质在机器人灵巧操作与力觉感知领域中应用的难度。另一方面,尽管微孔结构介质的制备方法经济高效,但该结构不仅拥有较厚的尺寸,限制了传感器的小型化设计,而且其内部空隙结构的分布与尺寸无法控制,限制了传感器制备与应用的稳定性。
5.此外,目前单点检测已经不能满足机器人灵巧手指尖力感知的应用需求,为了实现对物体插、拔、旋、拧等动作的更全面力信息的感知,研究学者们提出了多种基于不同检测机理的柔性阵列式测量方案,如电阻式、压电式、光学式和电容式等。目前基于光学的阵列式力测量依赖于光学设备,难以满足小型化设计和灵活的应用部署;压电式阵列力传感器只能表征力的动态变化,无法测量力的绝对大小;基于电阻与电容测量的阵列式力传感器获得更广泛的研究,但电阻式阵列力传感器易受温度影响且迟滞效应明显,相比之下灵敏度高、响应速度快的电容式阵列力传感器在机器人操作领域有着更广阔的应用场景。然而,现有阵列力传感器随着阵列密度的提升,敏感单元的测量灵敏度急剧下降,且电路复杂、图案化电极制备工艺(如光刻、溅射、喷涂等)复杂昂贵,仍然限制了此类传感器在智能操作领域中的实际应用。
6.综上所述,现有的力传感器存在非柔性、灵敏度低、体积大、且工艺制作流程复杂、成本高、稳定性差等问题,无法有效布置于机器人灵巧手末端并实时高灵敏力觉感知。因此,为实现机器人的精细操作,要求应用于机器人灵巧手末端的力传感器必须具备柔性、高灵敏、小型化、阵列化、工艺简便化、低成本化等特点。
技术实现要素:
7.本发明的目的是提供一种柔性阵列压力传感器及其制备方法,提高了压力传感器的灵敏度同时降低了制作成本。
8.为实现上述目的,本发明提供了如下方案:
9.一种柔性阵列压力传感器,包括由上而下依次设置的上层基底、上层电极、电介质层、下层电极和下层基底;
10.所述上层基底和所述下层基底均为柔性基底;所述上层电极包括第一正方形电极阵列,所述第一正方形电极阵列包括矩阵排列的正方形电极,所述第一正方形电极阵列中各行正方形电极分别与一条引线连接;所述下层电极包括第二正方形电极阵列,所述第二正方形电极阵列包括矩阵排列的正方形电极,所述第二正方形电极阵列中各列正方形电极分别与一条引线连接;所述第二正方形电极阵列中正方形电极与所述第一正方形电极阵列中正方形电极的垂直投影重合;
11.在所述柔性阵列压力传感器使用时,当所述第一正方形电极阵列中一条引线连接激励信号时,所述第一正方形电极阵列中其他引线连接屏蔽信号;所述第一正方形电极阵列中作为激励信号的引线随时间切换。
12.可选地,所述电介质层包括介质基底层和位于所述介质基底层上阵列式分布的楔形结构,每行所述楔形结构之间的间隔为0~500μm,每行楔形结构的高度均不大于100μm,所述介质基底层的高度为100~500μm。
13.可选地,所述电介质层的材料为硅橡胶。
14.可选地,所述第一正方形电极阵列和所述第二正方形电极阵列均为4
×
4正方形电极矩阵排列的阵列。
15.可选地,所述第一正方形电极阵列和所述第二正方形电极阵列中每个正方形电极的尺寸相同,每个正方形电极的边长为1~2mm。
16.可选地,所述第一正方形电极阵列中每条引线均连接一个条形电极,所述第一正方形电极阵列中各条形电极形成第一软排线;
17.所述第二正方形电极阵列中每条引线均连接一个条形电极,所述第二正方形电极阵列中各条形电极形成第二软排线;
18.所述第一软排线和所述第二软排线中各条形电极的宽度均为1mm,各条形电极的间距均为1mm。
19.可选地,所述上层基底和所述下层基底的材质均为聚酰亚胺薄膜,厚度均为25μm。
20.可选地,所述上层基底和所述下层基底均为直径1~2英寸的圆形。
21.本发明还公开了一种柔性阵列压力传感器制备方法,用于制备所述的柔性阵列压力传感器,包括:
22.将具备上层电极图案的第一smt钢网与上层基底贴合,将具备下层电极图案的第
二smt钢网与下层基底贴合;
23.分别在所述第一smt钢网和所述第二smt钢网的孔隙处导入银浆;
24.分别对所述第一smt钢网和所述第二smt钢网上银浆进行刮涂;
25.分别对刮涂之后的上层基底和下层基底进行烘干,形成与上层基底贴合的上层电极,与下层基底贴合的下层电极;
26.采用硅橡胶制备电介质层;
27.将所述电介质层粘合在所述下层电极上,并采用设定重量的物体压在所述电介质层上设置时间;
28.取下所述设定重量的物体后,将所述上层电极粘合在所述电介质层上,并使第二正方形电极阵列中正方形电极与第一正方形电极阵列中正方形电极的垂直投影重合;
29.采用设定重量的物体压在所述上层基底上设置时间,取下所述设定重量的物体后,得到所述柔性阵列压力传感器。
30.根据本发明提供的具体实施例,本发明公开了以下技术效果:
31.本发明公开了阵列式分布的楔形结构的电介质层,其中稀疏排列的楔形结构能够显著降低电介质层的弹性模量,提高了压力传感器测量的灵敏度;另外,在上层基底布置高密度阵列分布电极作为上层电极,在下层基底布置高密度阵列分布电极作为下层电极,实现基于柔性基底的小型化阵列式高灵敏压力测量,另外,本发明制备方法简单,降低了制作成本。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
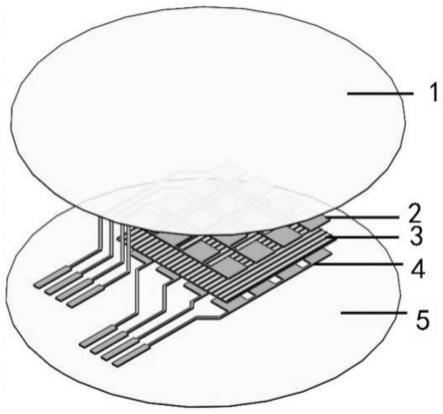
33.图1为本发明一种柔性阵列压力传感器结构示意图;
34.图2为本发明上层电极结构示意图;
35.图3为本发明下层电极结构示意图;
36.图4为本发明柔性阵列压力传感器工作原理示意图;
37.图5为基于本发明一种柔性阵列压力传感器的力测量装置结构示意图;
38.图6为本发明一种柔性阵列压力传感器中阵列信号电路原理图;
39.图7为本发明数字信号处理芯片电路原理图;
40.图8为本发明开关芯片电路原理图;
41.图9为本发明一种柔性阵列压力传感器制备流程示意图。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.本发明的目的是提供一种柔性阵列压力传感器及其制备方法,提高了压力传感器的灵敏度同时降低了制作成本。
44.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
45.图1为本发明一种柔性阵列压力传感器结构示意图,如图1所示,一种柔性阵列压力传感器,其特征在于,包括由上而下依次设置的上层基底1、上层电极2、电介质层3、下层电极4和下层基底5。
46.上层基底1和下层基底5均为柔性基底;如图2所示,上层电极2包括第一正方形电极阵列,第一正方形电极阵列包括矩阵排列的正方形电极,第一正方形电极阵列中各行正方形电极分别与一条引线连接;如图3所示,下层电极4包括第二正方形电极阵列,第二正方形电极阵列包括矩阵排列的正方形电极,第二正方形电极阵列中各列正方形电极分别与一条引线连接;所述第二正方形电极阵列中正方形电极与所述第一正方形电极阵列中正方形电极的垂直投影重合。
47.第二正方形电极阵列中正方形电极与第一正方形电极阵列中正方形电极一一对应,形成多个电容器。
48.在柔性阵列压力传感器使用时,当所述第一正方形电极阵列中一条引线连接激励信号时,所述第一正方形电极阵列中其他引线连接屏蔽信号;所述第一正方形电极阵列中作为激励信号的引线随时间切换。
49.作为具体实施方式,在柔性阵列压力传感器使用时,第一正方形电极阵列中的引线通过选路开关芯片,实现一条引线连接数字电容转换芯片激励信号,其他引线连接数字电容转换芯片屏蔽信号,激励信号的引线随时间按照设定顺序切换。第二正方形电极阵列中引线分别连接数字电容转换芯片信号端用于测量被激励电容器的实时信号。第一正方形电极阵列的被激励电极与第二正方形电极阵列中的信号电极形成被测电容器,由数字电容转换芯片实现电容测量,其他被屏蔽电极形成有源屏蔽电路实现对电路杂散电容的屏蔽,提升压力传感器测量的准确性。
50.第一正方形电极阵列和第二正方形电极阵列均至少为4
×
4正方形电极矩阵排列的阵列。
51.作为具体实施方式,第一正方形电极阵列和第二正方形电极阵列均为4
×
4正方形电极矩阵排列的阵列。第一正方形电极阵列引出的四条引线实现对第一正方形电极阵列中电极的横向选路,其中一条引线通过条形电极接有源激励进行电容测量,另外三条引线连接屏蔽信号,与第一正方形电极阵列的四条引线连接的条形电极实现与选路开关的连接,选路开关的电路结构如图8所示,有源激励信号和屏蔽信号均通过数字电容转换芯片提供,并由选路开关芯片实现选路工作。
52.如图4所示,电介质层3包括介质基底层和位于介质基底层上阵列式分布的楔形结构,每行所述楔形结构之间的间隔为0~500μm,每行楔形结构的高度均不大于100μm,所述介质基底层的高度为100~500μm。
53.作为具体实施方式,每行楔形结构之间的间隔为35μm,每行楔形结构的高度为100μm,介质基底层的高度为100μm。
54.图4中d表示上层电极2与下层电极4的间距,δd表示电介质层3的变形高度,fz表
示使柔性阵列压力传感器变形的压力,图4中(a)表示压力fz施加之前,图4中(b)表示压力fz施加之后。本发明提供的柔性阵列压力传感器基于电容式工作机理,其对正压力的采集单元由上层电极2、电介质层3及下层电极4构成的三明治结构组成。由于在外力作用下,力传感器的信号采集单元会发生变化,从而引起输出的电容值发生变化,通过采集信号采集单元的电容变化量,可感测作用于力传感器上的正压力fz的大小。由于电介质层3的稀疏阵列楔形微结构明显降低了电介质的等效弹性模量,导致上层电极2与下层电极4的间距d发生显著变化,从而使信号采集单元的电容发生变化,因此通过测量电容值变化量可实现对正压力的高灵敏测量。
55.电介质层3的材料为硅橡胶或pdms(聚二甲基硅氧烷)等弹性体,其中,硅橡胶具体选用道康宁184硅橡胶。与现有技术中不具备微结构的介质层相比,本发明提供的稀疏阵列式分布楔形微结构介质层通过降低电介质层3的等效弹性模量和填充率提高了对压力的测量灵敏度。
56.第一正方形电极阵列和第二正方形电极阵列中每个正方形电极的边长范围为1~2mm,第一正方形电极阵列和第二正方形电极阵列的尺寸至少为1
×
1cm。
57.作为具体实施方式,第一正方形电极阵列和第二正方形电极阵列中每个正方形电极尺寸均为1
×
1mm。
58.所述第一正方形电极阵列中每条引线均连接一个条形电极,所述第一正方形电极阵列中各条形电极形成第一软排线。
59.所述第二正方形电极阵列中每条引线均连接一个条形电极,所述第二正方形电极阵列中各条形电极形成第二软排线,通过第二软排线实现电容器与数字电容转换芯片信号端的连接,用于测量被激励电容器信号。
60.所述第一软排线和所述第二软排线中各条形电极的宽度均为1mm,各条形电极的间距均为1mm。
61.上层电极2与上层基底1通过制备工艺实现紧密贴合,构成上层柔性电路板;下层电极4与下层基底5通过制备工艺实现紧密贴合,构成下层柔性电路板。
62.上层基底1和下层基底5均为直径1~2英寸的圆形。
63.上层基底1和下层基底5的材质均为聚酰亚胺薄膜,厚度均为25μm,保证传感器的柔性化。本发明提供的力传感器在尽可能提升灵敏度的同时,通过紧密排布的电极与走线,有效地控制了传感器的厚度及体积,解决当前力传感器体积过大的问题,实现了力传感器(柔性阵列压力传感器)的微型化和薄膜化,从而可以灵活的部署在各类特种机械灵巧手上。
64.上层柔性电路板、下层柔性电路板及上层电极2、下层电极4的尺寸可根据实际需求进行调整。
65.如图5所示,本发明一种柔性阵列压力传感器还包括信号转换板,测量单元通过软排线与信号转换板连接,信号转换板上存在数字电容转换芯片。
66.如图5所示,以本发明提供的力传感器的上层电极及下层电极、数字信号处理芯片为数字电容转换芯片、处理器为mcu单片机为例,下层的电极与数字电容转换芯片的其中一个信号端相连,之后通过i2c协议与mcu单片机进行通讯,利用mcu单片机实时读取工作电极输出的感应信号变化量并进行处理,最终得到对应的受力值。
67.由于数字电容转换芯片的输出信号是计数次数,因此,mcu单片机需要利用特定公式将数字电容转换芯片输出计数次数转换为电容值,具体公式如下:
68.其中c
out
表示转换得到的电容值,n(pf)表示数字电容转换芯片的计数次数。
69.如图7所示,数字信号处理芯片电路中数字信号处理芯片优选为数字电容转换芯片ad7142,可对其进行两位的引脚设置改变i2c端口地址,实现不同i2c地址的力传感器并联使用,一般情况下两位地址引脚接地;如图8所示,开关芯片电路中开关芯片优选为rs2101cx6,实现对特定电容器测量,非测量电容器屏蔽的功能。
70.图6中c1-1、c1-2、
…
、c4-4为第一正方形电极阵列和第二正方形电极阵列中每对相对正方形电极形成的电容,cin1、cin2、cin3和cin4分别为第二正方形电极阵列通过引出线连接的四个条形电极,pa1、pa2、pa3和pa4分别为第一正方形电极阵列通过引出线连接的四个条形电极,u2、u3、u4和u5均为开关,分别与图8中sw1、sw2、sw3和sw4对应连接,dcs1表示屏蔽信号端,src1表示有源激励信号端。
71.图7中,cin3为信号端,dsc1为屏蔽信号端,avcc为模拟电源,agnd为模拟地,src1为有源激励,sdo/sda主设备数据输出,sdi主设备数据输入,sclk时钟,cs设备使能信号,int-中断信号,vref参考端正极,vref-参考端负极。
72.作为具体实施方式,mcu(微控制单元)单片机还可以利用ttl-usb转换器,通过usart通讯将得到的电容值变化量数据发送到上位机电脑上,利用电脑串口实时读取数据,并记录正压力fz相对应的电容值变化量。并在后续通过拟合电容值变化量和对应的作用力变化量,得到电容值和力的对应关系。通过将电容值和力的对应关系存储于mcu单片机中,可以根据传感信号以及电容值和力的对应关系反求力的大小。在实际使用过程中,上位机电脑(图5中pc端)可以实时获取作用力的变化,从而反映机器人灵巧手末端的受力情况。
73.如图9所示,本发明还公开了一种柔性阵列压力传感器制备方法,用于制备本发明一种柔性阵列压力传感器,包括以下步骤:
74.步骤101:将具备上层电极图案的第一smt(surface mounted technology,表面贴装技术)钢网与上层基底贴合,将具备下层电极图案的第二smt钢网与下层基底贴合,对应图9中步骤a。
75.步骤102:分别在第一smt钢网和第二smt钢网的孔隙处导入银浆,对应图9中步骤b。
76.步骤103:分别对第一smt钢网和第二smt钢网上银浆进行刮涂,对应图9中步骤c。
77.步骤104:分别对刮涂之后的上层基底和下层基底进行烘干,形成与上层基底贴合的上层电极,与下层基底贴合的下层电极,对应图9中步骤d,具体包括分别对刮涂之后的上层基底和下层基底进行120℃鼓风烘干。
78.其中,步骤104具体包括:用刀片将粘合剂在下层电路板表面刮出一层粘合剂,作为第一粘合层。
79.步骤106:采用硅橡胶制备电介质层,对应图9中步骤e。
80.步骤107:将电介质层粘合在下层电极上,并采用设定重量的物体压在电介质层上设置时间,对应图9中步骤f-步骤h。
81.其中,步骤107具体包括:将与图案化银电路(下层电极)相同面积的楔形结构电介质层放置在第一粘合层上,使电介质层的基底部分与粘合剂充分接触。
82.用重物压实12h。
83.步骤108:取下设定重量的物体后,将上层电极粘合在电介质层上,并使第二正方形电极阵列中正方形电极与第一正方形电极阵列中正方形电极的垂直投影重合,对应图9中步骤i。
84.其中,步骤108具体包括:用刀片将粘合剂在上层电极表面刮出一层粘合剂,作为第二粘合层;倒置第二粘合层,使粘合剂与电介质层的楔形微结构接触,同时通过与上层基底相同大小的模具及定位孔,使第二正方形电极阵列与第一正方形电极阵列对准,形成电容器。上层基底与下层基底尺寸相同。
85.步骤109:采用设定重量的物体压在上层基底上设置时间,取下设定重量的物体后,得到柔性阵列压力传感器,对应图9中步骤j-步骤k。
86.其中,步骤109具体包括:
87.用10g物体压实12h,取下压实物体后,得到柔性阵列压力传感器。
88.粘合剂为卡夫特k-706有机硅密封胶;粘结电介质层和上下层柔性电路板的k-706胶常用于粘结光电行业中电子元件、金属、玻璃、塑料等材料,可以保证介质层和上下层柔性电路板之间的粘结性,提高本发明柔性阵列压力传感器的稳定性。
89.本发明提供了一种柔性阵列压力传感器及其制备方法,通过设置稀疏阵列排列的高灵敏楔形微结构电介质层,显著降低介质层等效弹性模量,实现力传感器的超高灵敏度测量。进一步通过在柔性基底布置高密度阵列分布电极作为上层电极及下层电极,实现基于柔性基底的小型化阵列式高灵敏压力测量。
90.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
91.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1