通信方法、电子设备以及存储介质与流程
本技术实施例涉及通信,尤其涉及一种通信方法、电子设备以及存储介质。
背景技术:
1、在智慧家庭、智慧工厂等场景中,要求电子设备具备靠近检测能力。具备靠近检测能力的电子设备可以感知靠近电子设备的对象,进而在感知到存在对象靠近电子设备时,执行相应的操作。
2、目前可以在电子设备中设置有传感器,以用于进行靠近检测。但对于未设置传感器的物体,无法进行靠近检测。
技术实现思路
1、本技术实施例提供一种通信方法、电子设备以及存储介质,可以对未设置传感器的物体进行靠近检测。
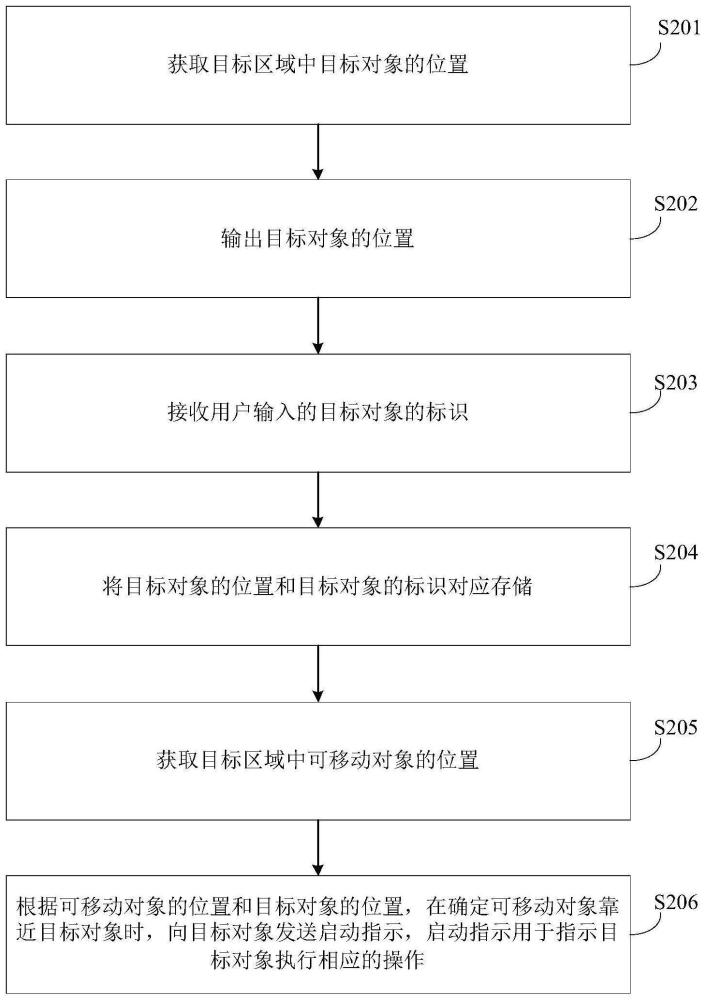
2、第一方面,本技术提供一种通信方法,执行该通信方法的执行主体可以为雷达设备或控制设备,以雷达设备为例,雷达设备可以获取目标区域中可移动对象的位置,且根据所述可移动对象的位置,以及所述目标区域中目标对象的位置,在确定所述可移动对象靠近所述目标对象时,执行目标操作,所述目标对象不具备靠近检测功能。
3、其中,当执行该通信方法的执行主体为控制设备时,雷达设备在获取目标区域中可移动对象的位置后,可以向控制设备发送目标区域中可移动对象的位置,以便控制设备可以获取可移动对象的位置。进而,控制设备可以根据所述可移动对象的位置,以及所述目标区域中目标对象的位置,在确定所述可移动对象靠近所述目标对象时,执行目标操作。
4、本技术中根据可以获取目标区域中可移动对象的位置的设备,对是否存在可移动对象靠近目标对象进行检测,间接地赋予不具备靠近检测功能具有靠近检测功能,如此可以触发执行可移动对象靠近目标对象的相应的操作。
5、在一种示例中,目标对象的位置可以为用户预先标定的。或者,在一种示例中,以雷达设备为例,雷达设备可以在获取目标区域中可移动对象的位置之前,获取所述目标对象的位置。其中,当雷达设备获取目标对象的位置后,当执行该通信方法的执行主体为控制设备时,雷达设备可以向控制设备发送目标对象的位置,以便控制设备可以获取目标对象的位置。
6、下面对雷达设备获取所述目标对象的位置的方法进行说明:
7、其一,当所述雷达设备为超宽带uwb雷达设备时,用户可以预先将uwb标签放置在所述目标对象上,或靠近所述目标对象放置,雷达设备可以发送数据帧,定位uwb标签,以获取所述目标对象的位置。在该示例中,因为uwb标签放置在所述目标对象上,或靠近所述目标对象放置,uwb标签的位置可以看作目标对象的位置,因此雷达设备通过定位uwb标签,可以以获取所述目标对象的位置。
8、在该实现方式中,雷达设备可以预先标定目标对象,得到目标对象的位置。其中,可以依靠定位uwb标签,获取目标对象的位置,实施方式简单,易实现。
9、其二,所述雷达设备可以为超宽带uwb雷达设备获取非uwb雷达设备,非uwb雷达设备如可以为超声波雷达、毫米波雷达,本技术实施例对非uwb雷达设备的类型不做限制。在该示例中,用户可以静止在目标对象处达到预设时长,雷达设备通过感知用户的位置,获取目标对象的位置。其中,雷达设备可以发射雷达信号,获取所述目标区域中用户的位置,其中,雷达设备根据所述用户的位置,若检测到所述用户的静止时长大于或等于预设时长,则将所述用户静止时的位置,作为所述目标对象的位置。
10、在该实现方式中,无需使用uwb标签,雷达设备通过感知用户的位置,即可实现标定目标对象,得到目标对象的位置,实施方式简单,易实现,且无需借助额外的uwb标签。
11、下面对可移动对象靠近目标对象后,控制设备、雷达设备执行的目标操作进行说明:
12、其中,当所述通信方法应用于雷达设备时,雷达设备可以向所述目标区域中的目标设备发送启动指示,所述启动指示用于指示所述目标设备执行相应的操作。在一种示例中,目标设备可以为目标对象,或者目标设备不为目标对象,但无论目标设备是否为目标对象,雷达设备均可以执行目标操作。
13、在一种示例中,当所述通信方法应用于雷达设备时,雷达设备可以响应于可移动对象靠近目标对象,向所述目标区域中的控制设备发送触发事件,所述触发事件用于表征所述可移动对象靠近所述目标对象,所述触发事件用于指示所述控制设备向所述目标设备发送所述启动指示。在该种示例中,控制设备响应于触发事件,可以向目标设备发送所述启动指示,以指示目标设备执行相应的操作。
14、在一种示例中,当所述通信方法应用于控制设备时,控制设备响应于可移动对象靠近目标对象,可以向所述目标设备发送所述启动指示,所述启动指示用于指示所述目标设备执行相应的操作。
15、本技术实施例中,当可移动对象靠近目标对象时,控制设备或雷达设备可以执行目标操作,以触发目标设备执行相应的操作,以便目标设备可以准确、及时地响应。
16、在一种可能的实现方式中,以所述通信方法应用于控制设备为例,控制设备检测可移动对象靠近目标对象的方式为:控制设备根据所述可移动对象的位置,以及所述目标区域中目标对象的位置,若所述可移动对象与所述目标对象的距离减小,且小于或等于预设距离,则确定所述可移动对象靠近所述目标对象。
17、在该可能的实现方式中,在可移动对象逐渐靠近目标对象,且可移动对象与所述目标对象的距离小于或等于预设距离时,可以确定可移动对象靠近目标对象,这样可以避免可移动对象远离所述目标对象时,误触发控制设备或雷达设备执行目标操作的问题。
18、在一种可能的实现方式中,控制设备或雷达设备在获取所述目标对象的位置之后,还可以输出目标对象的位置,便于用户对目标对象进行标识,相应的,控制设备或雷达设备在接收用户输入的所述目标对象的标识后,可以对应存储所述目标对象的标识和所述目标对象的位置。其中,目标对象的标识可以包括但不限于目标对象的名称、编号或图片等。
19、在该可能的实现方式中,控制设备或雷达设备可以将目标对象的位置和目标对象的标识相对应,以便于在可移动对象靠近目标对象时,可以根据目标对象的标识,执行准确的目标操作。
20、本技术实施例中需要借助雷达设备发射雷达信号,感知获取目标对象的位置以及可移动对象的位置,因此对象的位置的准确性,对于靠近检测的准确性至关重要。而雷达设备存在近距离盲区,本技术实施例中为了减小雷达设备的近距离盲区,可以采用如下方式获取对象的位置。下面以雷达设备获取可移动对象的位置为例进行说明:
21、雷达设备可以交替发射第一波形的雷达信号和第二波形的雷达信号,检测所述可移动对象,所述第一波形包括一个波峰,所述第二波形包括多个波峰。雷达设备发射第一波形的雷达信号时,雷达设备的近距离盲区小,如为20cm。雷达设备发射第二波形的雷达信号时,雷达设备的近距离盲区大,如为1m。其中,雷达设备交替发射第一波形的雷达信号和第二波形的雷达信号的目的在于:尽可能检测到可移动对象,以避免检测不到可移动对象。
22、其中,当所述可移动对象与所述雷达设备的距离小于或等于距离阈值时,发射第一波形的雷达信号,获取所述可移动对象的位置。当所述可移动对象与所述雷达设备的距离大于距离阈值时,发射第二波形的雷达信号,获取所述可移动对象的位置。
23、本技术中,雷达设备在检测可移动对象时,可以交替发射第一波形的雷达信号和第二波形的雷达信号,以确定可移动对象处于雷达设备的近端或远端。其中,当可移动对象处于雷达设备的近端(即可移动对象与所述雷达设备的距离小于或等于距离阈值)时,因为第一波形的雷达信号的近距离盲区小于第二波形的雷达信号的近距离盲区,雷达设备可以发射第一波形的雷达信号继续检测可移动对象,以减小雷达设备的近距离盲区。当可移动对象处于雷达设备的远端(可移动对象与所述雷达设备的距离大于距离阈值)时,雷达设备可以发射第二波形的雷达信号继续检测对象,第二波形的雷达信号的灵敏度高,因此可以提高雷达设备的检测灵敏度。
24、在一种可能的实现方式中,在发射所述第一波形的雷达信号获取所述可移动对象的位置时,雷达设备还获取所述可移动对象的反射信号能量,且根据所述可移动对象的反射信号能量,调整所述雷达设备的发射功率,以使所述雷达设备中的接收机不饱和或临界饱和。
25、对象距离雷达设备越近,对象的反射信号能量越高。在该可能的实现方式中,当可移动对象处于雷达设备的近端时,为了避免可移动对象距离雷达设备太近导致雷达设备的接收机饱和,可以适应性地调整雷达设备的发射功率,以使所述雷达设备中的接收机不饱和或临界饱和,这样可以保证雷达设备可以顺利感知可移动对象。
26、在一种可能的实现方式中,在雷达设备发射所述第一波形的雷达信号获取所述可移动对象的位置时,可以获取所述可移动对象的反射信号能量,和/或,反射信号相位变化量;且雷达设备可以根据所述可移动对象的反射信号能量,和/或,反射信号相位变化量,检测所述可移动对象与所述雷达设备的距离是否大于所述距离阈值。其中,当可移动对象与所述雷达设备的距离大于所述距离阈值时,雷达设备可以交替发射所述第一波形的雷达信号和所述第二波形的雷达信号。
27、在该可能的实现方式中,当可移动对象处于雷达设备的近端时,雷达设备可以根据所述可移动对象的反射信号能量,和/或,反射信号相位变化量,及时检测所述可移动对象与所述雷达设备的距离,在雷达设备的距离大于所述距离阈值时,即可移动对象处于雷达设备的远端时,雷达设备可以交替发射所述第一波形的雷达信号和所述第二波形的雷达信号,这样可以避免可移动对象在雷达设备的近端和远端反复,以便于雷达设备可以准确感知可移动对象。
28、第二方面,本技术提供一种通信方法,应用于雷达设备,在该方法中,雷达设备可以交替发射第一波形的雷达信号和第二波形的雷达信号,检测对象,所述第一波形包括一个波峰,所述第二波形包括多个波峰;当所述对象与所述雷达设备的距离小于或等于距离阈值时,发射第一波形的雷达信号,检测对象;当所述对象与所述雷达设备的距离大于距离阈值时,发射第二波形的雷达信号,检测对象。
29、在一种可能的实现方式中,所述方法还包括:在发射所述第一波形的雷达信号检测所述对象时,获取所述对象的反射信号能量;根据所述对象的反射信号能量,调整所述雷达设备的发射功率,以使所述雷达设备中的接收机不饱和或临界饱和。
30、在一种可能的实现方式中,所述方法还包括:在发射所述第一波形的雷达信号检测所述对象时,获取所述对象的反射信号能量,和/或,反射信号相位变化量;根据所述的反射信号能量,和/或,反射信号相位变化量,检测所述对象与所述雷达设备的距离是否大于所述距离阈值;若是,则交替发射所述第一波形的雷达信号和所述第二波形的雷达信号。
31、第三方面,本技术提供一种电子设备,包括:处理器;所述处理器,用于:获取目标区域中可移动对象的位置;根据所述可移动对象的位置,以及所述目标区域中目标对象的位置,在确定所述可移动对象靠近所述目标对象时,执行目标操作,所述目标对象不具备靠近检测功能。
32、在一种可能的实现方式中,所述处理器,还用于获取所述目标对象的位置。
33、在一种可能的实现方式中,所述电子设备还包括收发器;所述收发器,用于发送数据帧,定位uwb标签,所述uwb标签放置在所述目标对象上,或靠近所述目标对象放置。
34、所述处理器,用于根据定位所述uwb标签的结果,获取所述目标对象的位置。
35、在一种可能的实现方式中,所述电子设备还包括收发器;所述收发器,用于发射雷达信号,以及接收所述目标区域中用户反射的雷达信号。
36、所述处理器,用于根据所述用户反射的雷达信号,获取所述目标区域中用户的位置,以及根据所述用户的位置,若检测到所述用户的静止时长大于或等于预设时长,则将所述用户静止时的位置,作为所述目标对象的位置。
37、在一种可能的实现方式中,所述电子设备还包括收发器;所述收发器,用于接收来自所述目标区域中雷达设备的所述目标对象的位置,所述雷达设备用于获取所述目标对象的位置。
38、在一种可能的实现方式中,所述电子设备还包括收发器;所述收发器,用于交替发射第一波形的雷达信号和第二波形的雷达信号,检测所述可移动对象,所述第一波形包括一个波峰,所述第二波形包括多个波峰,且当所述可移动对象与所述电子设备的距离小于或等于距离阈值时,发射第一波形的雷达信号,获取所述可移动对象的位置,以及当所述可移动对象与所述电子设备的距离大于距离阈值时,发射第二波形的雷达信号,获取所述可移动对象的位置。
39、在一种可能的实现方式中,在所述收发器发射所述第一波形的雷达信号获取所述可移动对象的位置时,所述处理器,还用于获取所述可移动对象的反射信号能量;根据所述可移动对象的反射信号能量,调整所述电子设备的发射功率,以使所述电子设备中的接收机不饱和或临界饱和。
40、在一种可能的实现方式中,所述处理器,还用于获取所述可移动对象的反射信号能量,和/或,反射信号相位变化量;根据所述可移动对象的反射信号能量,和/或,反射信号相位变化量,检测所述可移动对象与所述电子设备的距离是否大于所述距离阈值;所述收发器,还用于当所述可移动对象与所述电子设备的距离大于所述距离阈值时,交替发射所述第一波形的雷达信号和所述第二波形的雷达信号。
41、第四方面,本技术实施例提供一种电子设备,该电子设备可以包括:处理器、存储器。存储器用于存储计算机可执行程序代码,程序代码包括指令;当处理器执行指令时,指令使所述电子设备执行如第一方面、第二方面中的方法。
42、第五方面,本技术实施例提供一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述第一方面、第二方面中的方法。
43、第六方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述第一方面、第二方面中的方法。
44、上述第二方面至第六方面的各可能的实现方式,其有益效果可以参见上述第一方面所带来的有益效果,在此不加赘述。
- 还没有人留言评论。精彩留言会获得点赞!