一种爆炸物识别方法与流程
1.本发明涉及安检技术领域,尤其涉及一种爆炸物识别方法。
背景技术:
2.随着公共安全的需求越来越高,地铁、机场等人员密集公共区域需要进行安全检查。爆炸物的种类很多,按照种类包括液体炸药、粉末状炸药和固体炸药,目前,检测爆炸物的主要技术方法有两大类:微痕量炸药探测和块体炸药探测,其中微痕量炸药探测是指对微量或痕量爆炸残留物进行取样和分析的技术。基本原理是:收集爆炸物在处理过程中总会留下气体或固体颗粒形式的残留物,搜集这些残留物并使用相关的探测技术对其进行分析,从而判断是否存在爆炸物。常见的微痕量炸药探测技术有电化学技术和激光拉曼光谱技术。
3.块体炸药探测是指探测可见数量的炸药。通常包括x、γ射线成像技术和基于核的技术。x、γ射线都是通过高能电磁波探测出物质的密度、原子序数等特征量。核技术主要包括核四极矩共振技术和中子技术。
4.双能ct技术通过对x射线的投影数据进行重建得到包含密度和原子序数的被扫描物体断层图像,通过分析这些特征数据,可以有效地识别隐藏的物体,实现对被扫描物体中危险物品的识别。但是,密度和原子序数并不是爆炸物的唯一属性。某些常见的安全物品也会出现与爆炸物的密度和原子序数相近的情况,如果不考虑爆炸物的状态差异,那么误报情况将大大增多。
技术实现要素:
5.鉴于上述的分析,本发明实施例旨在提供一种爆炸物识别方法,用以解决现有的方法无法分别识别不同状态爆炸物的问题。
6.一方面,本发明实施例提供了一种爆炸物识别方法,所述爆炸物识别方法包括:
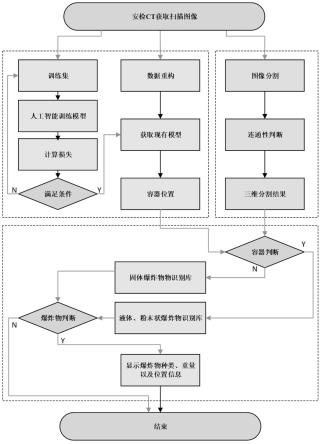
7.人工智能识别容器的边界框;
8.分割三维体数据中的三维物体,并获得每个三维物体的边界框;
9.识别爆炸物:将所述每个三维物体的边界框与所述人工智能识别出的容器的边界框进行匹配,判断三维物体是否被一个容器包裹着;如果是,则该三维物体进入液体和粉末状爆炸物识别库进行匹配;如果不是,则该三维物体进入固体爆炸物识别库进行匹配。
10.优选地,所述人工智能识别容器的边界框,包括:通过ct进行实时在线检测,获得不同角度下的三维正投影dr图像;采用人工智能模型识别dr图像,根据不同角度的识别结果进行交集运算,得到容器三维识别的边界框。
11.优选地,在所述通过ct进行实时在线检测之前,进行人工智能模型训练,包括:
12.(1)获得人工智能识别的数据
13.根据ct重建的密度和原子序数数据,进行不同角度的正投影,得到高低能的投影数据,并进行赋色,得到彩色的dr图像;
14.(2)人工智能模型训练
15.预先采集容器的ct重建数据,根据步骤(1)得到的dr图像作为训练集,采用人工智能模型进行预测,得到容器所在空间位置;计算损失函数,如果损失函数满足要求,那么可以应用当前状态下的人工智能模型进行容器识别;如果损失函数不满足要求,则修正人工智能模型,重新进行识别,直到满足条件。
16.优选地,所述分割三维体数据中的三维物体,并获得每个三维物体的边界框,包括:
17.通过双能ct扫描得到扫描件不同角度的投影数据,对投影数据进行重构,得到多个二维断层,对二维断层按序编号;
18.对每个二维断层中的二维物体进行分割,并获取每个二维断层中的每个二维物体的特征,对每个二维断层中的二维物体按序编号;
19.分析判断三维体连通,得到连通结果,完成三维物体分割,并获得每个三维物体的特征;;
20.每个三维物体的断层开始位置和结束位置定义为边界框的z1和z2;每个断层的最小矩形框取并集,得到的结果定义为[x1,y1,x2,y2];最终三维物体的边界框为[x1,y1,z1,x2,y2,z2];其中x1、y1、z1、x2、y2、z2分别三维物体的最小外接立方体的起点和终点的x、y、z坐标。
[0021]
优选地,所述图像预处理包括图像平滑、图像增强、图像区域分割和膨胀腐蚀。
[0022]
优选地,所述二维物体的特征包括密度均值、密度均方差、原子序数均值、原子序数均方差、物体面积、物体周长、区域重心横坐标、区域重心纵坐标和最小外接矩形。
[0023]
优选地,所述分析判断三维体连通,,包括:以第i个二维断层的第k个二维物体m
ik
为基础,遍历第i-1个二维断层中的每个二维物体,判断第i-1个二维断层中的每个二维物体分别与二维物体m
ik
的中心位置、面积、平均密度、平均原子序数的差异是否满足阈值要求;如果第i-1个二维断层中有满足阈值要求的二维物体,则根据中心位置差异、面积差异、平均密度差异、平均原子序数差异,对所述满足阈值要求的二维物体进行综合评分,差异越小,评分越高,综合得分最高的二维物体则为第i-1个二维断层中与二维物体m
ik
具有连通性的连通区域;如果第i-1个二维断层中没有满足阈值要求的二维物体,则遍历第i-j个二维断层中的每个二维物体,重复上述步骤;其中,i≥2,k≥1,i≥j≥2;j由小到大取值,只有当前所取值的二维断层中没有满足阈值要求的二维物体时,j才进一步取比当前值大1的值;重复上述连通性分析的所有步骤,直至每个二维断层中的每个二维物体的连通性分析完毕;具有连通性的二维物体组合形成三维物体,完成三维物体分割。
[0024]
优选地,所述匹配爆炸物的方式包括自主判断准则或采用人工智能方式判断。
[0025]
优选地,所述爆炸物识别方法还包括结果显示,如果匹配的结果为爆炸物,那么输出结果显示出爆炸物的位置以及预测的爆炸物的名称、重量、体积和密度;如果匹配结果都不是爆炸物,那么直接输出结果。
[0026]
优选地,所述爆炸物的位置可以根据获得的三维物体的边界框进行确定。
[0027]
与现有技术相比,本发明至少可实现如下有益效果:
[0028]
1、本发明针对现有的安检ct设备,使用人工智能方式识别容器,并且输出容器所在的空间位置;对三维体数据中的三维物体进行分割,并得到三维物体的边界框,将三维物
体的位置特征与人工智能识别的容器位置进行匹配;判断每个物体是否被容器包裹,如果是,那么为液体或粉末状物体,进行液体和粉末状爆炸物匹配;否则为固体,进行固体爆炸物匹配;该方法可以将液体和粉末状爆炸物与固体爆炸物分别进行识别,提高了爆炸物识别的准确性。
[0029]
2、本发明的三维物体分割方法以二维断层中的每个二维物体为连通性判断对象进行连通性判断,最终将具有连通性的二维物体组合形成三维物体,即本发明是二维区域生长。相比于现有技术中的三维区域增长法,本发明将需要区域增长的范围从三维的26个像素减小到二维的8个像素,因此,本发明的三维物体分割方法更快,进而使爆炸物识别更快。
[0030]
3、相比于现有技术的阈值法分割三维物体,由于ct图像中存在伪影现象,阈值法不能准确地将所有物体进行准确分割,而本发明是二维区域生长,可以容纳差异,减小伪影的影响,因此,本发明的三维物体分割方法对三维物体分割准确度更高,进而使爆炸物识别更准确。
[0031]
4、相比于现有技术的边界法,由于边界法需要进行一阶或者二阶微分计算以及迭代运算,而本发明无需任何迭代,因此,本发明的三维物体分割方法更快,进而使爆炸物识别更快。
[0032]
本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
[0033]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0034]
图1为本发明识别爆炸物的流程图;
[0035]
图2为本发明的三维体数据中的三维物体分割方法流程图;
[0036]
图3为采用本发明的三维体数据中的三维物体分割方法进行连通性分析后每个二维物体的编号改变前后示意图。
具体实施方式
[0037]
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
[0038]
在安全检查领域,通过双能ct技术识别爆炸物技术是通过双能ct技术计算出每个物品对应的平均电子密度和原子序数,然后与已知的爆炸物信息进行对比。判断是否为爆炸物,但是爆炸物种类较多,如果不考虑物体的状态,就使得爆炸物的误报较多。因此,识别爆炸物对应的状态是关键。
[0039]
并且,安检过程中,包裹进行ct扫描结束后,通过传输带输送到用户面前,在这个较短的过程中就需要将爆炸物识别出来。因此,对于物品必须要进行快速的三维分割和爆炸物的识别。
[0040]
由此,本发明提供了一种爆炸物识别方法,如图1所示,所述爆炸物识别方法包括:
[0041]
1、人工智能识别容器的边界框(空间位置)
[0042]
s1.1:获得人工智能识别的数据
[0043]
根据ct重建的密度和原子数据,进行不同角度(例如0度、45度、90度、135度、180度)的正投影,得到高低能的投影数据,并进行赋色,得到彩色的dr图像。
[0044]
其中,不同颜色代表不同的材质。示例性地,食品、塑料等有机物显示为橙色;书本、陶瓷等无机物显示为绿色;混合物也多呈现绿色,不锈钢制品、金属则显示为蓝色。
[0045]
s1.2:人工智能模型训练
[0046]
预先采集容器的ct重建数据,然后根据s1.1获得的不同角度的彩色dr图像作为训练集,经过人工智能模型(例如rcnn神经网络模型)进行预测,得到容器所在空间位置;将得到的容器所在空间位置与预先采集容器的ct重建数据进行对比,计算出损失函数,如果损失函数满足要求,那么可以应用当前状态下的人工智能模型进行容器识别;否则,修正人工智能模型,重新进行识别,直到满足条件。最终输出容器识别结果的边界框。
[0047]
s1.3:在线自动识别,获取三维空间位置信息
[0048]
ct进行实时在线检测,对三维数据进行s1.1处理,获得不同角度下的三维正投影dr图像,采用s1.2的人工智能模型进行识别,得到不同角度的识别结果,然后根据不同角度的识别结果进行交集运算,得到整个容器三维识别的边界框。
[0049]
需要说明的是,以上步骤s1.1和s1.2是为了得到准确的用于识别容器的人工智能模型,以确保s1.3在线自动识别时的准确性。在实际安检过程中,步骤s1.1和s1.2在设备调试过程中进行,进行实时在线安检时,直接进行步骤s1.3。
[0050]
2、分割三维体数据中的三维物体,并获得每个三维物体的边界框;
[0051]
s2.1:通过双能ct扫描得到扫描件不同角度(例如0到360度,每间隔1度设置一个角度)的投影数据,对投影数据进行重构和反演获得高能、低能以及密度和原子序数数据图像,得到三维体数据的多个二维断层,对二维断层按序编号。
[0052]
进一步地,得到多个二维断层后,对所述二维断层进行图像预处理,以提高图像的信噪比,使得分割结果更精确。
[0053]
具体来说,所述图像预处理包括图像平滑、图像增强、图像区域分割和膨胀腐蚀。
[0054]
s2.2:对每个二维断层中的二维物体进行分割,并获取每个二维断层中的每个二维物体的特征,对每个二维断层中的二维物体按序编号。
[0055]
具体地,对每个二维断层中的二维物体进行分割的方法可为本领域的常规方法,例如,区域增长法或边界法。
[0056]
示例性地,所述区域增长法包括:遍历每个二维断层并选取每个二维断层中的种子点,再遍历该二维断层中种子点的邻域,在邻域中,与种子点的差异小于阈值的点作为生长点进行邻域生长,从而完成每个二维断层中二维物体的分割。
[0057]
示例性地,密度图像分割种子点的差异阈值为0.1。
[0058]
所述二维物体的特征包括密度均值、密度均方差、原子序数均值、原子序数均方差、物体面积、物体周长、区域重心横坐标、区域重心纵坐标和最小外接矩形。
[0059]
s2.3:分析判断三维体连通:
[0060]
s2.3.1:以第i个二维断层的第k个二维物体m
ik
为基础,遍历第i-1个二维断层中的
每个二维物体,判断第i-1个二维断层中的每个二维物体分别与二维物体m
ik
的中心位置、面积、平均密度、平均原子序数的差异是否满足阈值要求;如果第i-1个二维断层中有满足阈值要求的二维物体,则根据中心位置差异、面积差异、平均密度差异、平均原子序数差异,对所述满足阈值要求的二维物体进行综合评分,差异越小,评分越高,综合得分最高的二维物体则为第i-1个二维断层中与二维物体m
ik
具有连通性的连通区域;如果第i-1个二维断层中没有满足阈值要求的二维物体,则遍历第i-j个二维断层中的每个二维物体,重复上述步骤;其中,i≥2,k≥1,i≥j≥2;j由小到大取值,只有当前所取值的二维断层中没有满足阈值要求的二维物体时,j才进一步取比当前值大1的值。
[0061]
需要说明的是,i≥2,即第1个二维断层不用分析其连通性,将其直接作为已有的连通区域,直接以第2个二维断层中的二维物体为基础开始分析连通性。
[0062]
示例性地,所述中心位置、面积、平均密度、平均原子序数的差异阈值分别为14、50、0.1、1。
[0063]
示例性地,所述综合评分按照式(i)进行:
[0064][0065]
其中,s0为二维物体m
ik
的面积,ρ0为二维物体m
ik
的平均密度,z0为二维物体m
ik
的平均原子序数,x0和y0分别为二维物体m
ik
的中心位置横坐标和纵坐标;s1为满足阈值要求的二维物体的面积,ρ1为满足阈值要求的二维物体的平均密度,z1为满足阈值要求的二维物体的平均原子序数,x1和y1分别为满足阈值要求的二维物体的中心位置横坐标和纵坐标,a、b、c、d为大于0的参数。
[0066]
a、b、c、d的值为加权比重,根据相应特征的差异阈值确定,例如,a为14/4,b为50/4,c为0.1/4,d为1/4,表示四者在上述差异阈值的情况下权重相同。
[0067]
本发明中,将没有满足阈值要求的二维物体的二维断层定义为误差断层,在步骤s2.3.1中,允许遍历的误差断层的层数为a,当j等于a时,如果第i-a个二维断层中还没有满足阈值要求的二维物体,则停止进一步向上遍历;其中,a≥1,例如a为1、2或3。
[0068]
也就是说,在步骤s2.3.1中,如果第i-1个二维断层中有满足阈值要求的二维物体,则对其进行综合评分,判断出连通区域;如果第i-1个二维断层中没有满足阈值要求的二维物体,则遍历第i-j个二维断层中的每个二维物体;i≥j≥2,j由小到大取值,只有当前j所取值的二维断层中没有满足阈值要求的二维物体时,j才进一步取比当前值大1的值,直到寻找到满足阈值要求的二维物体(连通区域)或j=a为止;如果当前j所取值的二维断层中存在满足阈值要求的二维物体,则结束本次遍历,如果始终没有找到满足阈值要求的二维物体,则结束本次遍历。
[0069]
进一步地,如果所遍历的二维断层中有满足阈值要求的二维物体,确定综合得分最高的二维物体后,将二维物体m
ik
的编号修改为与所述综合得分最高的二维物体相同的编号;如果所遍历的二维断层中始终没有找到满足阈值要求的二维物体,则在已经完成连通性分析的连通性区域最大编号的基础上加一,将其作为二维物体m
ik
的编号。
[0070]
需要说明的是,第1个断层中的每个二维物体可以看做是已经完成连通性分析的连通性区域。
[0071]
s2.3.2:重复步骤s2.3.1,直至每个二维断层中的每个二维物体的连通性分析完
毕;具有连通性的二维物体组合形成三维物体,完成三维物体分割。包括:
[0072]
s2.3.2.1:以第i个二维断层的第k+1个二维物体m
i(k+1)
为基础,重复步骤s2.3.1,直至第i个二维断层中的每个二维物体的连通性分析完毕;
[0073]
s2.3.2.2:以第i+1个二维断层的第k个二维物体m
(i+1)k
为基础,重复步骤s2.3.1和步骤s2.3.2.1,直至每个二维断层中的每个二维物体的连通性分析完毕。
[0074]
为了进一步清楚地说明步骤s2.1-s2.3中关于连通性的分析,以图3为例进行说明。
[0075]
s2.1:通过双能ct扫描,得到4个二维断层(图3仅显示出4个二维断层,是为了方面说明),并将4个二维断层从上向下进行序数编号,分别为1、2、3、4;
[0076]
s2.2:对每个二维断层中的二维物体进行分割,并获取每个二维断层中的每个二维物体的特征,对第1个二维断层中的二维物体进行序数编号为1、2、3、4,对第2个二维断层中的二维物体进行序数编号为1、2、3,对第3个二维断层中的二维物体进行序数编号为1、2,对第4个二维断层中的二维物体进行序数编号为1、2、3;
[0077]
s2.3:分析判断三维体连通:
[0078]
s2.3.1:先分析第2个二维断层的连通性,以第2个二维断层的第1个二维物体m
21
为基础,遍历第1个二维断层中的每个二维物体,第1个二维断层中的第1个二维物体满足阈值要求且综合得分最高,则第1个二维断层中的第1个二维物体是二维物体m
21
的连通区域,将二维物体m
21
的编号改为与第1个二维断层中的第1个二维物体的编号相同(本身编号都是1,这里不需要改动);以第2个二维断层的第2个二维物体m
22
为基础,遍历第1个二维断层中的每个二维物体,第1个二维断层中的第3个二维物体满足阈值要求且综合得分最高,则第1个二维断层中的第3个二维物体是二维物体m
22
的连通区域,将二维物体m
22
的编号改为与第1个二维断层中的第3个二维物体的编号相同,即将二维物体m
22
的编号改为3;以第2个二维断层的第3个二维物体m
23
为基础,遍历第1个二维断层中的每个二维物体,第1个二维断层没有满足阈值要求的二维物体,而且第1个二维断层中的二维物体的最大编号为4,则将二维物体m
23
的编号改为5;第2个二维断层的连通性分析完毕。
[0079]
再分析第3个二维断层的连通性,以第3个二维断层的第1个二维物体m
31
为基础,遍历第2个二维断层中的每个二维物体,第2个二维断层中没有满足阈值要求的二维物体,则遍历第1个二维断层中的每个二维物体,第1个二维断层中的第2个二维物体满足阈值要求且综合得分最高,即第1个二维断层中的第2个二维物体是二维物体m
31
的连通区域,将二维物体m
31
的编号改为与第1个二维断层中的第2个二维物体的编号相同,即将二维物体m
31
的编号改为2;以第3个二维断层的第2个二维物体m
32
为基础,遍历第2个二维断层中的每个二维物体,第2个二维断层中的编号为5的二维物体满足阈值要求且综合得分最高,即第2个二维断层中的编号为5的二维物体是二维物体m
32
的连通区域,二维物体m
32
的编号改为5;第3个二维断层的连通性分析完毕。
[0080]
再分析第4个二维断层的连通性,以第4个二维断层的第1个二维物体m
41
为基础,遍历第3个二维断层中的每个二维物体,第3个二维断层中没有满足阈值要求的二维物体,则遍历第2个二维断层中的每个二维物体,第2个二维断层中也没有满足阈值要求的二维物体,则遍历第1个二维断层中的每个二维物体,第1个二维断层中也没有满足阈值要求的二维物体,确定始终都没有找到满足阈值要求的二维物体,并且之前找到的连通区域的最大
编号为5,则将二维物体m
41
的编号改为6;以第4个二维断层的第2个二维物体m
42
为基础,遍历第3个二维断层中的每个二维物体,第3个二维断层中没有满足阈值要求的二维物体,则遍历第2个二维断层中的每个二维物体,第2个二维断层中也没有满足阈值要求的二维物体,则遍历第1个二维断层中的每个二维物体,第1个二维断层中也没有满足阈值要求的二维物体,确定始终都没有找到满足阈值要求的二维物体,并且之前找到的连通区域的最大编号为6,则将二维物体m
42
的编号改为7;以第4个二维断层的第3个二维物体m
43
为基础,遍历第3个二维断层中的每个二维物体,第3个二维断层中编号为5的二维物体满足阈值要求且综合得分最高,则将二维物体m
43
的编号改为5。即,完成所有二维断层的所有二维物体的连通性分析。
[0081]
现有技术中,三维物体的分割通常采用三维区域生长法、阈值法或边界法,这些方法要么耗时长、要么三维物体分割结果不准确。
[0082]
本发明的上述三维物体分割方法以二维断层中的每个二维物体为连通性判断对象进行连通性判断,最终将具有连通性的二维物体组合形成三维物体,即本发明是二维区域生长。相比于现有技术中的三维区域增长法,本发明将需要区域增长的范围从三维的26个像素减小到二维的8个像素,因此,本发明的三维物体分割方法更快,进而使爆炸物识别更快。相比于现有技术的阈值法分割三维物体,由于ct图像中存在伪影现象,阈值法不能准确地将所有物体进行准确分割,而本发明是二维区域生长,可以容纳差异,减小伪影的影响,因此,本发明的三维物体分割方法对三维物体分割准确度更高,进而使爆炸物识别更准确。相比于现有技术的边界法,由于边界法需要进行一阶或者二阶微分计算以及迭代运算,而本发明无需任何迭代,因此,本发明的三维物体分割方法更快,进而使爆炸物识别更快。
[0083]
s2.4得到每个三维物体的特征,包括空间位置、体积、平均密度、平均原子序数、密度均方差、原子序数均方差等。对应三维物体的特征如下:
[0084][0085][0086][0087][0088][0089]
其中,si表示三维物体的第i个像素对应的面积,voxel表示像素对应的像素尺寸,ρi和zi分别表示像素对应的密度值和原子序数值;v、ρ
mean
、z
mean
、σ
ρ
、σz分别表示三维物体对
应的体积、平均密度、平均原子序数、密度均方差、原子序数均方差。
[0090]
为了快速获得均方差特征,密度均方差、原子序数均方差可以简写为σ
ρsimple
和σ
zsimple
:
[0091][0092][0093]
其中,s
k,i
、ρ
k,i
、z
k,i
分别表示第k(k=1-k)层切片中第i个像素对应的面积、密度、原子序数。
[0094]
s2.5获得三维数据分割每个物体的边界框。
[0095]
每个三维物体的断层开始位置和结束位置定义为边界框的z1和z2,每个断层的最小矩形框取并集,得到的结果定义为[x1,y1,x2,y2];最终三维物体的边界框的边界框为[x1,y1,z1,x2,y2,z2]。其中x1、y1、z1、x2、y2、z2分别三维物体的最小外接立方体的起点和终点的x、y、z坐标。
[0096]
3、识别爆炸物
[0097]
s3.1将三维数据分割中得到每个三维物体的边界框与人工智能识别出的容器的边界框进行匹配,判断每个三维物体是否被一个容器包裹着;如果是,则该三维物体进入液体和粉末状爆炸物识别库进行匹配;如果不是,则该三维物体进入固体爆炸物识别库进行匹配。
[0098]
需要说明的是,所述“包裹着”是指三维物体的边界框小于且紧挨着容器的边界框。由于液体和粉末状物质具有流动性,其一定是装在容器中,且与容器内壁相接触,因此,三维物体的边界框小于且紧挨着容器的边界框时,可以判定该三维物体为液体或粉末状,将其进入液体和粉末状爆炸物识别库进行匹配;反之,则三维物体为固体,将其进入固体爆炸物识别库进行匹配。
[0099]
值得注意的是,本发明的“固体”是指不具有流动性且在容器中无法完全与容器内壁接触的块状固体。本发明的“容器”是指能够盛装液体或粉末物质的器皿,例如,瓶、罐等。
[0100]
本发明中,所述匹配爆炸物的方式可以为自主判断准则或采用人工智能方式判断。
[0101]
示例性地,自主判断准则包括:根据特征,自主判断,密度偏差小于某数,原子序数偏差小于某数等,则判定为匹配成功;反之,则匹配不成功。
[0102]
示例性地,采用人工智能方式判断包括:根据特征,采用人工智能的方式进行判断,具体如下:
[0103]
根据步骤s2.3得到的特征值,进行爆炸物数据的特征分类:
[0104]
(1)输入:选择的特征变量,以及对应的爆炸物属性。
[0105]
(2)根据特征和属性,采用不同的分类方法,例如svm,k-nn,获得分类模型。
[0106]
(3)计算结果,如果结果满足要求,那么该模型可以应用当前状态下的人工智能模
型进行物质特征识别;否则,修正模型,重新进行识别,直到满足条件。
[0107]
(4)输出:对应物体的属性。
[0108]
该匹配方式是通过人工智能的方式自动进行对比,最终把每个物体都与数据库中爆炸物进行对比,得到每个物体的匹配结果。
[0109]
s3.2结果显示
[0110]
如果匹配的结果为爆炸物,那么在渲染结果上显示出爆炸物的位置,以及在信息框内显示预测的爆炸物名称、重量、体积、密度等信息。如果一个包裹内物体的匹配结果都不是爆炸物,那么直接输出渲染结果。
[0111]
其中,爆炸物的位置可以根据s2.4的结果直接输出。
[0112]
与现有技术相比,本发明至少可实现如下有益效果:本发明针对现有的安检ct设备,使用人工智能方式识别容器,并且输出容器所在的空间位置;使用快速三维分割技术,输出特征,将三维物体的位置特征与人工智能识别的容器位置进行匹配;判断每个物体是否被容器包裹,如果是,那么为液体或粉末状物体,进行液体和粉末状爆炸物匹配;否则为固体,进行固体爆炸物匹配;该方法可以快速将液体和粉末状爆炸物与固体爆炸物分别进行识别,提高了爆炸物识别的准确性。
[0113]
下面通过具体实施例进一步说明本发明的爆炸物识别方法。
[0114]
实施例1
[0115]
s1.1:根据ct重建的密度和原子数据,进行不同角度(包括0度、45度、90度、135度、180度)的正投影,得到高低能的投影数据,并进行赋色,得到彩色的dr图像。
[0116]
其中,不同颜色代表不同的材质。示例性地,食品、塑料等有机物显示为橙色;书本、陶瓷等无机物显示为绿色;混合物也呈现绿色,不锈钢制品、金属则显示为蓝色。
[0117]
s1.2:预先采集容器的ct重建数据,然后根据获得的不同角度的彩色dr图像作为训练集,经过人工智能模型(例如rcnn神经网络模型)进行预测,得到容器所在空间位置;将得到的容器所在空间位置与预先采集容器的ct重建数据进行对比,计算出损失函数,如果损失函数满足要求,那么可以应用当前状态下的人工智能模型进行容器识别;否则,修正人工智能模型,重新进行识别,直到满足条件。最终输出容器识别结果的边界框。
[0118]
s1.3:安检ct设备进行实时在线扫描过程后,对三维数据进行s1.1处理,获得不同角度下的三维正投影dr图像,采用s1.2的人工智能模型进行识别,得到不同角度的识别结果,然后根据不同角度的识别结果进行交集运算,得到整个容器三维识别的边界框。
[0119]
s2.1:通过双能ct扫描得到扫描件不同角度(例如0到360度,每间隔1度设置一个角度)的投影数据,对投影数据进行重构和反演获得高能、低能以及密度和原子序数数据图像,得到三维体数据的多个二维断层,对二维断层按序编号。
[0120]
进一步地,得到多个二维断层后,对所述二维断层进行图像预处理,以提高图像的信噪比,使得分割结果更精确。
[0121]
具体来说,所述图像预处理包括图像平滑、图像增强、图像区域分割和膨胀腐蚀。
[0122]
s2.2:对每个二维断层中的二维物体进行分割,并获取每个二维断层中的每个二维物体的特征,对每个二维断层中的二维物体按序编号。
[0123]
具体地,对每个二维断层中的二维物体进行分割的方法可为本领域的常规方法,例如,区域增长法或边界法。
[0124]
示例性地,所述区域增长法包括:遍历每个二维断层并选取每个二维断层中的种子点,再遍历该二维断层中种子点的邻域,在邻域中,与种子点的差异小于阈值的点作为生长点进行邻域生长,从而完成每个二维断层中二维物体的分割。
[0125]
示例性地,密度图像分割种子点的差异阈值为0.1。
[0126]
所述二维物体的特征包括密度均值、密度均方差、原子序数均值、原子序数均方差、物体面积、物体周长、区域重心横坐标、区域重心纵坐标和最小外接矩形。
[0127]
s2.3:分析判断三维体连通:
[0128]
s2.3.1:以第i个二维断层的第k个二维物体m
ik
为基础,遍历第i-1个二维断层中的每个二维物体,判断第i-1个二维断层中的每个二维物体分别与二维物体m
ik
的中心位置、面积、平均密度、平均原子序数的差异是否满足阈值要求;如果第i-1个二维断层中有满足阈值要求的二维物体,则根据中心位置差异、面积差异、平均密度差异、平均原子序数差异,对所述满足阈值要求的二维物体进行综合评分,差异越小,评分越高,综合得分最高的二维物体则为第i-1个二维断层中与二维物体m
ik
具有连通性的连通区域;如果第i-1个二维断层中没有满足阈值要求的二维物体,则遍历第i-j个二维断层中的每个二维物体,重复上述步骤;其中,i≥2,k≥1,i≥j≥2;j由小到大取值,只有当前所取值的二维断层中没有满足阈值要求的二维物体时,j才进一步取比当前值大1的值。
[0129]
需要说明的是,i≥2,即第1个二维断层不用分析其连通性,直接以第2个二维断层中的二维物体为基础开始分析连通性。
[0130]
示例性地,所述中心位置、面积、平均密度、平均原子序数的差异阈值分别为14、50、0.1、1。
[0131]
示例性地,所述综合评分按照式(i)进行:
[0132][0133]
其中,s0为二维物体m
ik
的面积,ρ0为二维物体m
ik
的平均密度,z0为二维物体m
ik
的平均原子序数,x0和y0分别为二维物体m
ik
的中心位置横坐标和纵坐标;s1为满足阈值要求的二维物体的面积,ρ1为满足阈值要求的二维物体的平均密度,z1为满足阈值要求的二维物体的平均原子序数,x1和y1分别为满足阈值要求的二维物体的中心位置横坐标和纵坐标,a、b、c、d为大于0的参数。
[0134]
a、b、c、d的值为加权比重,根据相应特征的差异阈值确定,例如,a为14/4,b为50/4,c为0.1/4,d为1/4,表示四者在上述差异阈值的情况下权重相同。
[0135]
本发明中,将没有满足阈值要求的二维物体的二维断层定义为误差断层,在步骤s2.3.1中,允许遍历的误差断层的层数为a,当j等于a时,如果第i-a个二维断层中还没有满足阈值要求的二维物体,则停止进一步向上遍历;其中,a≥1(例如a=3)。
[0136]
也就是说,在步骤s2.3.1中,如果第i-1个二维断层中有满足阈值要求的二维物体,则对其进行综合评分,判断出连通区域;如果第i-1个二维断层中没有满足阈值要求的二维物体,则遍历第i-j个二维断层中的每个二维物体;i≥j≥2,j由小到大取值,只有当前j所取值的二维断层中没有满足阈值要求的二维物体时,j才进一步取比当前值大1的值,直到寻找到满足阈值要求的二维物体(连通区域)或j=a为止;如果当前j所取值的二维断层中存在满足阈值要求的二维物体,则停止遍历。
[0137]
进一步地,如果所遍历的二维断层中有满足阈值要求的二维物体,确定综合得分最高的二维物体后,将二维物体m
ik
的编号修改为与所述综合得分最高的二维物体相同的编号;如果所遍历的二维断层中始终没有找到满足阈值要求的二维物体,则在已经完成连通性分析的连通性区域最大编号的基础上加一,将其作为二维物体m
ik
的编号。
[0138]
需要说明的是,第1个断层中的每个二维物体可以看作是已经完成连通性分析的连通性区域。
[0139]
s2.3.2:重复步骤s2.3.1,直至每个二维断层中的每个二维物体的连通性分析完毕;具有连通性的二维物体组合形成三维物体,完成三维物体分割。包括:
[0140]
s2.3.2.1:以第i个二维断层的第k+1个二维物体m
i(k+1)
为基础,重复步骤s2.3.1,直至第i个二维断层中的每个二维物体的连通性分析完毕;
[0141]
s2.3.2.2:以第i+1个二维断层的第k个二维物体m
(i+1)k
为基础,重复步骤s2.3.1和步骤s2.3.2.1,直至每个二维断层中的每个二维物体的连通性分析完毕。
[0142]
s2.4:得到每个三维物体的特征,包括空间位置、体积、平均密度、平均原子序数、密度均方差、原子序数均方差等。
[0143]
s2.5获得三维数据分割每个物体的边界框:每个三维物体的断层开始位置和结束位置定义为边界框的z1和z2,每个断层的最小矩形框取并集,得到的结果定义为[x1,y1,x2,y2];最终三维物体的边界框的边界框为[x1,y1,z1,x2,y2,z2]。其中x1、y1、z1、x2、y2、z2分别三维物体的最小外接立方体的起点和终点的x、y、z坐标。
[0144]
s3.1:将三维数据分割中得到每个三维物体的边界框与人工智能识别出的容器的边界框进行匹配,判断每个三维物体是否被一个容器包裹着;如果是,则该三维物体进入液体和粉末状爆炸物识别库进行匹配;如果不是,则该三维物体进入固体爆炸物识别库进行匹配。
[0145]
s3.2:结果显示
[0146]
如果匹配的结果为爆炸物,那么在渲染结果上显示出爆炸物的位置,以及在信息框内显示预测的爆炸物名称、重量、体积、密度等信息。如果一个包裹内物体的匹配结果都不是爆炸物,那么直接输出渲染结果。
[0147]
其中,爆炸物的位置可以根据s2.5的结果直接输出。
[0148]
该实施例中,在2.4ghz的电脑上,对一个512*512*343的三维体数据进行三维物体分割,三维物体分割完成时间为5s,分割出11种三维物体。
[0149]
对比例1
[0150]
对与实施例1相同的扫描件进行扫描,不同的是,采用现有技术中的三维区域生长法对扫描件的三维体数据中的三维物体进行分割,在2.4ghz的电脑上,对于一个512*512*343的三维体数据,区域生长大约需要50s的时间完成。
[0151]
对比例2
[0152]
对与实施例1相同的扫描件进行扫描,不同的是,采用现有技术中的阈值法对扫描件的三维体数据中的三维物体进行分割,在2.4ghz的电脑上,对于一个512*512*343的三维体数据,阈值法只能分割出6种三维物体。
[0153]
对比例3
[0154]
对与实施例1相同的扫描件进行扫描,不同的是,采用现有技术中的边界法对扫描
件的三维体数据中的三维物体进行分割,在2.4ghz的电脑上,对于一个512*512*343的三维体数据,边界法用时45s。
[0155]
从实施例1与对比例1、3的结果对比可以看出,本发明的方法相对于现有的三维区域生长法和边界法,本发明的方法可以更快速地完成三维物体分割,进而更快地识别出爆炸物;从实施例1与对比例2的结果对比可以看出,本发明的方法相对于现有的阈值法,本发明分割三维物体的精确度更高,进而使爆炸物的识别精确度更高。
[0156]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1