一种基于全机落震试验加速度获取部件过载的方法与流程
1.本技术属于飞机落震试验领域,特别涉及一种基于全机落震试验加速度获取部件过载的方法。
背景技术:
2.全机落震试验中,通过在试验机各部件处安装加速度传感器来测量该处的动态响应时间历程,然后通过数据处理加速度获取部件的过载。落震试验属于冲击过程,会激起机体高阶弹性模态响应,并且加速度测量数据也会叠加高频干扰信号;而部件或机载设备设计中关注的过载仅与机体刚体模态和低阶弹性模态相关。因此如何对加速度数据进行处理以获取部件的过载,是全机落震试验中需要解决的问题。
技术实现要素:
3.本技术的目的是提供了一种基于全机落震试验加速度获取部件过载的方法,以解决现有技术中加速度数据会激起高阶弹性模态数据、叠加高频干扰信号而导致难以处理的问题。
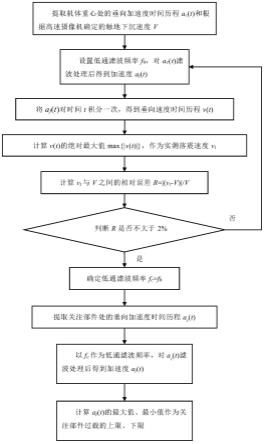
4.本技术的技术方案是:一种基于全机落震试验加速度获取部件过载的方法,包括:进行全机落震试验,获取飞机重心处的垂向加速度时间历程ac(t)和触地下沉速度;设置低通滤波频率f0,对ac(t)进行低通滤波处理,得到加速度af(t);将af(t)对时间t积分一次,得到垂向速度时间历程v(t);根据v(t)计算实测落震速度v
t
;计算v
t
与v之间的相对误差r;判断相对误差r是否不大于2%,若是,则确定低通滤波频率fc=f0,继续进行下一步骤;若否,则重新设置低通滤波频率f0,并重复获取相对误差r,直至相对误差r不大于2%;提取关注部件处的垂向加速度时间历程ai(t);以fc作为低通滤波频率,对ai(t)滤波处理后得到加速度aj(t);计算aj(t)的最大值max{aj(t)}作为关注部件过载的上限gu、最小值min{aj(t)}作为关注部件过载的下限g
l
。
5.优选地,采用数值积分法对af(t)的时间t进行积分。
6.优选地,以v(t)的绝对最大值作为实测落震速度v
t
。
7.本技术的一种基于全机落震试验加速度获取部件过载的方法,通过先获取全机落震试验中的垂向加速度时间历程和触地下沉速度,对垂向加速度时间历程进行滤波后得到加速度,对加速度进行积分后得到垂向速度时间历程,而后将垂向速度时间历程的绝对最大值最为实测落震速度,通过判断实测落震速度与触地下沉速度之间的相对误差是否大于2%,来判断是否为所需的滤波频率,若是,则提取关注部件处的垂向加速度时间历程,进行低通滤波后即可得到关注部件的过载大小,为舰载机结构和机载设备的设计提供输入,方法简单稳定,能够有效地去除高阶弹性模态和高频干扰信号的影响。
附图说明
8.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易
见地,下面描述的附图仅仅是本技术的一些实施例。
9.图1为本技术整体流程示意图;
10.图2为本技术飞机重心处的垂向加速度时间历程示意图;
11.图3为本技术低通滤波后飞机重心处的垂向加速度时间历程示意图;
12.图4为本技术飞机重心处的垂向速度时间历程;
13.图5为本技术飞机平尾处的垂向加速度时间历程;
14.图6为本技术低通滤波后飞机平尾处的垂向加速度时间历程。
具体实施方式
15.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
16.一种基于全机落震试验加速度获取部件过载的方法,包括如下步骤:
17.步骤s100,进行全机落震试验,获取飞机重心处的垂向加速度时间历程ac(t)和触地下沉速度v。
18.步骤s200,设置低通滤波频率f0,对ac(t)进行低通滤波处理,得到加速度af(t)。
19.步骤s300,将af(t)对时间t积分一次,得到垂向速度时间历程v(t),即v
t
=max{|v(t)|}。
20.步骤s400,根据v(t)计算实测落震速度v
t
。
21.步骤s500,计算v
t
与v之间的相对误差r:r=|(vt-v)|/v。
22.步骤s600,判断相对误差r是否不大于2%,若是,则确定低通滤波频率fc=f0,继续进行下一步骤。若否,则重复步骤s200-s600,重新设置低通滤波频率f0,并重复获取相对误差r,直至相对误差r不大于2%。
23.步骤s700,提取关注部件处的垂向加速度时间历程ai(t)。
24.步骤s800,以fc作为低通滤波频率,对ai(t)滤波处理后得到加速度aj(t)。
25.步骤s900,计算aj(t)的最大值max{aj(t)}作为关注部件过载的上限gu、最小值min{aj(t)}作为关注部件过载的下限g
l
,即gu=max{aj(t)}、g
l
=min{aj(t)}。
26.本技术通过先获取全机落震试验中的垂向加速度时间历程和触地下沉速度,对垂向加速度时间历程进行滤波后得到加速度,对加速度进行积分后得到垂向速度时间历程,而后将垂向速度时间历程的绝对最大值最为实测落震速度,通过判断实测落震速度与触地下沉速度之间的相对误差是否大于2%,来判断是否为所需的滤波频率,若是,则提取关注部件处的垂向加速度时间历程,进行低通滤波后即可得到关注部件的过载大小,为舰载机结构和机载设备的设计提供输入,方法简单稳定,能够有效地去除高阶弹性模态和高频干扰信号的影响。
27.作为一种具体实施方式,以下以一个具体实例进行说明:
28.步骤一:
29.提取全机落震试验中飞机重心处的垂向加速度时间历程ac(t),见图2。根据高速摄像机确定的触地下沉速度v=3.5m/s。
30.步骤二:
31.设置低通滤波频率f0=15hz,对ac(t)进行低通滤波,这里采用巴特沃斯型滤波器,
处理后得到加速度af(t),见图3。
32.步骤三:
33.采用数值积分法,这里采用梯形积分公式,将af(t)对时间t积分一次,得到垂向速度时间历程v(t),见图4。
34.步骤四:
35.计算v(t)的绝对最大值作为实测落震速度v
t
,由图4可知v
t
=3.687m/s。
36.步骤五:
37.计算v
t
与v之间的相对误差:r=|(v
t-v)|/v=5.34%。
38.步骤六:
39.判断相对误差r是大于2%,需要重复步骤二~步骤六,直至得到满足需要的滤波频率。表1统计了迭代过程中的不同低通滤波频率f0对应的实测落震速度v
t
和相对误差r。可见,当f0=5hz时,相对误差r=0.15%,不大于2%,满足要求。因此,确定低通滤波频率fc=5hz。
40.表1迭代过程参数数值
41.迭代次序f0hzv
t
m/sr1153.6875.34%2103.6424.06%353.5050.15%
42.步骤七:
43.提取平尾处的垂向加速度时间历程ai(t),见图5。
44.步骤八:
45.以5hz作为低通滤波频率,对ai(t)滤波处理后得到加速度aj(t),见图6。
46.步骤九:
47.计算aj(t)的最大值max{aj(t)}、最小值min{aj(t)}作为关注部件过载的上限gu、下限g
l
。由图6可知,gu=2.848g、g
l
=-1.405g。
48.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1