一种人工复眼成像系统
1.本发明涉及一种成像系统,特别是一种人工复眼成像系统。
背景技术:
2.复眼作为一种特殊的成像系统,由于其具有宽视场、小偏差、大景深及运动灵敏等特点,在成像系统中占有非常重要的地位。复眼结构通常利用图像传感器接收各微透镜感知的光学信息。基于微透镜的布局方式以及微透镜与图像传感器之间的匹配方式,复眼成像系统可被分为不同类型。
3.最直接的复眼成像系统是平面复眼成像系统。以德国应用光学与精密工程研究所2010年的研究为例(br
ü
ckner a,duparr
é
j,leitel r,et al.thin wafer-level camera lenses inspired by insect compound eyes[j].optics express,2010,18(24):24379-94.),其微透镜以平面阵列形式进行分布,并通过图像传感器对每个微透镜的成像结果进行了记录,最终通过对各个微透镜成像结果进行拼接得到一张超精密的图像。类似的研究还有进一步的facetvision camera(br
ü
ckner a,rster a,dunkel j,et al.ultra-slim 2d-and depth-imaging camera modules for mobile imaging[c]//moems and miniaturized systems xv.spie,2016,9760:125-133.)等等。但由于这种成像系统中微透镜以平面阵列形式分布,因此其视场受到了较大限制,并未发挥出宽视场的优势。
[0004]
传统的曲面成像系统通过多块反射镜的配合可以实现宽视场的捕捉(https://en.wikipedia.org/wiki/omnidirectional_(360-degree)_camera),但由于系统顶部反射镜的存在,这种成像系统会不可避免地缺失正前方光场信息。而基于复眼的曲面成像系统虽然有望解决该问题,却面临另一难题:如何对应匹配曲面的微透镜布局和平面分布的传感器。
[0005]
大多解决方案集中于将平面分布的传感器替换为曲面的传感阵列。2013年song等人提出可先将弹性平面微透镜阵列与光电二极管阵列进行匹配及结合,再利用流体压力将结合体统一进行弯曲变形,最终形成基于复眼的曲面成像系统(song y m,xie y,malyarchuk v,et al.digital cameras with designs inspired by the arthropod eye[j].nature,2013,497(7447):95-99.)。由于需要确保弯曲后的微透镜阵列与光电二极管阵列仍然保持着原有的对应关系,该系统对微透镜的设计,弯曲所产生的应力控制以及加工的精度提出了较高的要求。类似的,floreano等人在同年也提出首先将微透镜阵列与cmos芯片进行结合,再将结合体进行切割,最后将切割后的复眼阵列进行弯曲形成曲面成像系统(floreano d,pericet-camara r,viollet s,et al.miniature curved artificial compound eye[j].proceedings of the national academy of sciences,2013,110(23):9267-9272)。但是该成像系统难以进行成像,只能用于动态光流检测。
[0006]
直接用平面分布的传感器接受曲面布局微透镜的光场信息则是另一种思路,且该思路非常接近自然复眼结构。图1为自然复眼结构中的单个小眼结构,其包括微透镜1、晶锥
体2、感杆束3、光接受细胞4和色素细胞5。
[0007]
光纤作为一种光导材料,具有可弯折的特性。因此通过微透镜、光纤及平面分布的图像传感器之间的配合,可实现曲面光场信息向平面的转换。尽管马孟超等人先前提出过基于光纤的复眼结构(马孟超,张翼,顾磊,等.一种重叠型复眼:中国,cn113141493a.2021-07-20.),但该复眼结构存在以下局限性:
[0008]
1.只能对预设的图像进行复原成像,不能对现实图像进行快速成像。这是因为:(1)由于多模光纤自身的模式散射,图像经过光纤传导后会变为散斑图,即不再是清晰图像。因此每根光纤传导的图像实际上仅仅是最终图像的一个像素;(2)所选光纤直径大,导致最终图像的单个像素尺寸较大,整体像素质量下降;(3)受限于其加工方法(普通3d打印技术的特征尺寸为0.5mm),因此光纤与光纤间的距离较远,像素化严重。
[0009]
2.该复眼结构并非一个完整的成像系统,即只能在实验室使用,难以工程化应用。这是因为:(1)前文提到过的3d打印技术的限制导致整体尺寸难以降低;(2)系统未进行集成化设计,对光纤并未进行保护处理,难以工程化应用。
[0010]
3.造价成本高。这是由于该复眼结构如前文所述尺寸较大,因此所用的cmos相机芯片较大,而芯片的大尺寸则直接提高了成本。类似的,如果选用多个单像素光电传感器,则对单像素光电传感器的数量提出了要求,也极大地提升了成本。
技术实现要素:
[0011]
针对现有技术的缺陷,本发明提供了一种人工复眼成像系统。
[0012]
一种人工复眼成像系统,包括多个微透镜和光纤,所述多个微透镜呈半球形均匀分布,所述光纤的一端与所述微透镜相连,另一端通过光纤定位器连接成像镜头,所述成像镜头使得所述微透镜所采集的图像能够聚焦到感应芯片上,所述感应芯片上均匀分布有用于接收来自光纤图像信息的图像传感器。
[0013]
进一步的,所述图像传感器为平面图像传感器;所述光纤定位器包括依次连接的曲面模板、第一转接段、平面集束段和第二转接段;所述光纤定位器还包括保护套,其套设于所述光纤定位器之外;所述曲面模板由平面圆盘和半球形圆顶组成,在半球形圆顶上分布有多个球面微通孔,所述带有微透镜的光纤固定于所述微通孔中。
[0014]
优选的,所述第一转接段为环形通孔圆柱,用于连接曲面模板与所述平面集束段;所述平面集束段内具有多个位于同一平面上均匀分布的光纤定位孔,所述光纤从所述光纤定位孔穿过;所述平面集束段的外壁上有第一外螺纹,通过所述第一外螺纹与第二转接段连接;所述第二转接段用于连接所述平面集束段与所述成像镜头,所述第二转接段具有第一内螺纹,所述平面集束段的第一外螺纹与所述第二转接段的第一内螺纹相匹配,使得所述平面集束段的第一外螺纹可以旋入第二转接段内;所述第二转接段的外壁上设置有第二外螺纹,所述第二外螺纹与保护套的第二内螺纹相匹配。
[0015]
本发明的有益效果是:本发明提出了一种新型的人工复眼成像系统,利用微透镜、光纤及图像传感器之间的优化配合,实现宽视角真实图像的实时显示。本发明解决了平面分布的图像传感器难以与曲面分布的微透镜匹配的问题,能够对现实图像进行实时采集,而非对预设图像进行还原,同时避免了复杂的图像还原程序,提高了系统的可靠性。实现了人工复眼成像系统的微型集成,该集成系统能在真实环境中使用,同时其尺寸较小,应用范
围更大;该系统所需的基本材料均为市场上常见且极为便宜材料,同时由于减小了整体尺寸,对cmos/ccd芯片的面积要求也大大减小,因此降低了成本。
附图说明
[0016]
图1为自然复眼的小眼结构图;
[0017]
图2为人工复眼的小眼结构图;
[0018]
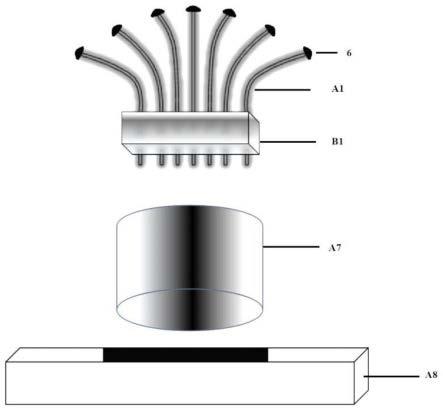
图3为成像系统的结构示意图;
[0019]
图4为光纤定位器结构图;
[0020]
图5为曲面模板的正视图;
[0021]
图6为曲面模板的俯视图;
[0022]
图7为第一转接段的结构图;
[0023]
图8为平面集束段的正视图;
[0024]
图9为平面集束段的俯视图;
[0025]
图10为第二号转接段的结构图;
[0026]
图11为保护套的结构图;
[0027]
图12为实时成像实例;
[0028]
图中:微透镜1、晶锥体2、感杆束3、光接受细胞4、色素细胞5、微透镜6、光纤核7、光纤包层8、图像传感器9、平面圆盘10、半球形圆顶11、球面微通孔12、光纤a1、曲面模板a2、第一转接段a3、平面集束段a4、第二转接段a5、保护套a6、成像镜头a7、感应芯片a8、光纤定位器b1。
具体实施方式
[0029]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明,使本发明的上述及其它目的、特征和优势将更加清晰。在全部附图中相同的附图标记指示相同的部分。并未刻意按比例绘制附图,重点在于示出本发明的主旨。
[0030]
小眼是复眼的基本单元,最终的复眼成像就是通过对各个小眼成像结果的集成实现的。自然复眼的小眼结构如图1所示,其由微透镜1、晶锥体2、感杆束3、光接受细胞4及色素细胞5组成。类似的,如图2所示,本发明的小眼结构由微透镜6、光纤核7、光纤包层8及图像传感器9组成。光纤包层8包裹光纤核7,光纤核7与光纤包层8共同组成了光纤a1,微透镜6通过光纤a1连接图像传感器9。
[0031]
其中:微透镜6模仿自然复眼的微透镜1及晶锥体2,用于收集局部光场信息;光纤核7模仿自然复眼的感杆束3,用于传输光场信息;光纤包层8模仿自然复眼的色素细胞5,用于防止相邻小眼的光信号干扰;图像传感器9模仿自然复眼的光接受细胞4,用于最终记录光场信息。
[0032]
参阅图3,本发明的人工复眼成像系统包括多个微透镜6和光纤a1,多个微透镜6呈半球形均匀分布,多个微透镜6例如可以是100、200、300等数量的微透镜,微透镜数目越多越有助于提高成像质量。光纤a1的一端与微透镜6相连,另一端(出口端面)穿入光纤定位器b1,且将光信号照射于成像镜头a7上,通过成像镜头a7使得微透镜6所采集的图像能够聚焦
到感应芯片a8上。感应芯片a8可以是cmos、ccd等平面状芯片,cmos/ccd芯片a8上均匀分布有图像传感器9,图像传感器9采用平面图像传感器,用于接收来自光纤a1的图像信息。
[0033]
本发明的成像系统由微透镜6、光纤a1,光纤定位器b1、成像镜头a7及cmos/ccd芯片a8组成。其中,成像镜头a7用于:1.使光纤出口端面所成的像能够清晰地聚焦到cmos、ccd芯片a8上;2.能够降低光纤直径对成像分辨率的影响,即在相同的光纤直径下允许分布更多的光纤。cmos/ccd芯片a8上均匀分布了图像传感器9,用于接收来自光纤的图像信息。
[0034]
下面对系统各个组成部分分别做详细介绍。
[0035]
微透镜6
[0036]
由于单个小眼的成像被视为最终成像结果的一个像素,因此应尽量减少其所包含的光场范围以提高单个像素的有效数据信息,进而提高整体成像的分辨率及清晰度。而减少单个小眼的光场范围又是通过对微透镜进行精细化设计实现的。具体来说,通过分析微透镜的形状、关键尺寸及折射率对光场接受范围的影响,可最终确定微透镜的形状及材料。
[0037]
光纤a1
[0038]
在材料方面,相较于石英光纤,塑料光纤具有更好的弯折性,即更不易在装配和使用过程中被折断,因此选用的光纤为塑料光纤。在尺寸方面,由于市场常见的塑料光纤na值均为0.5,对应的接受角为60
°
;因此如前文所述,为了减小单像素尺寸进而提高图像分辨率,光纤尺寸应越小越好。
[0039]
光纤定位器b1
[0040]
为了获得宽视场的光场信息,光纤带微透镜6的一端应以一定规律呈曲面分布(光线入口端面);为了利用平面分布的传感器对光场进行记录,光纤另一端则应按照对应位置进行集束,且所有光纤的出口端面应位于同一平面。因此需要对光纤进行定位。
[0041]
如图4所示,光纤定位器b1包括曲面模板a2、第一转接段a3、平面集束段a4和第二转接段a5,除此之外,光纤定位器b1还可以包括保护套a6,其套设于光纤定位器b1之外,在成像系统工作时取下。通过各部件之间的配合实现光纤的定位。
[0042]
参阅图5与图6,其为曲面模板a2的正视图及俯视图,该曲面模板a2用于固定光纤带微透镜6的一端。该曲面模板a2主要由平面圆盘10和半球形圆顶11组成,在半球形圆顶11上按照一定规律分布了多个球面微通孔12,在该实施例中球面微通孔12为271个。带有微透镜6的光纤a1固定于微通孔12中,平面圆盘10目的是连接该曲面模板与其他配件,其为环形结构,内径与半球形圆顶11的内壁直径相同。半球形圆顶11的内外径根据加工方式的最小关键尺寸决定。球面微通孔12的直径略大于(20-50um)光纤a1直径。
[0043]
如图7所示,第一转接段a3用于连接曲面模板a2与平面集束段a4,并实现系统密封,避免光纤a1直接裸露于环境中。第一转接段a3的结构可以为环形通孔圆柱。
[0044]
如图8及图9所示,其为平面集束段a4的正视图及俯视图,该平面集束段a4用于将光纤a1的另一端面按照一种排布规律进行紧凑化排布。该平面集束段a4内具有多个位于同一平面上均匀分布的光纤定位孔13,光纤定位孔13的数量与球面微通孔12的数量相同,例如分布271个微通孔,各个光纤定位孔13的位置对应球面微通孔12位置,且直径略大于(20-50um)光纤a1直径,因此光纤a1穿过光纤定位孔13后将按照光纤定位孔13的分布方式进行分布。该平面集束段a4外壁上有第一外螺纹14(例如约10厘米长的外螺纹),通过第一外螺纹14可以与第二转接段a5连接。
[0045]
参阅图10及11,第二转接段a5用于连接平面集束段a4与成像镜头a7,且第二转接段a5连接成像镜头a7端直径与成像镜头a7直径相同。第二转接段a5具有第一内螺纹15,平面集束段a4的第一外螺纹14与第二转接段a5的第一内螺纹15相匹配,使得平面集束段a4的第一外螺纹14可以旋入第二转接段a5内,从而实现平面集束段a4与第二转接段a5的连接。进一步的,在第二转接段a5外壁上可以设置有第二外螺纹16,第二外螺纹16与保护套a6的第二内螺纹17相匹配,这样通过第二外螺纹16与第二内螺纹17可以将保护套a6套于微透镜6、第一转接段a3以及平面集束段a4之外。
[0046]
保护套a6用于在相机非工作状态下保护相机的脆弱部位,如微透镜6。该保护套a6的一端封闭,另一端设有第二内螺纹17,中间为空心结构。当相机不工作时,可将保护套a6与第二转接段a5进行螺纹连接,此时成像部分均被保护套a6包裹,可有效减少环境对相机的损耗。
[0047]
下面结合附图对系统的装配与成像过程做介绍。
[0048]
步骤1,使光纤a1与微透镜6组合。
[0049]
微透镜6是透明材质,如玻璃,可固化透明液体等,光纤a1的一端与微透镜6连接,例如可以通过胶接的方式实现二者间的连接,光纤与透镜的连接在其他技术中已有介绍,本发明不再赘述。
[0050]
步骤2,进行光纤a1的定位。具体包括以下步骤:
[0051]
a.在曲面模板a2及平面集束段a4上标序号,确认二者通孔对应关系;
[0052]
b.将光纤a1不带微透镜的一头从外向内插入曲面模板a2的中心位置通孔,再穿过第一转接段a3,最后通过平面集束段a4中的光纤定位孔13,并在曲面模板a2内侧中心位置微通孔12处涂抹少量uv胶并固化该部位胶水以固定光纤a1;
[0053]
c.在曲面模板a2及平面集束段a4的从中心向边缘的第一圈的初始位置重复上述b步骤;
[0054]
d.在曲面模板a2及平面集束段a4的从中心向边缘的第一圈的其他序号位置依次对应重复b步骤;
[0055]
e.在曲面模板a2及平面集束段a4从内向外的其他圈按顺序依次对应重复上述步骤;
[0056]
f.在平面集束段a4出口位置涂抹uv胶并固化该部位胶水以固定光纤;
[0057]
g.平齐切断平面集束段a4出口位置的多余光纤,形成光纤出口平面,并对该光纤端面进行打磨;
[0058]
h.将a2、a3及a4通过胶水连接,a4与a5通过内外螺纹装配连接;
[0059]
i.在相机不工作时,a6与a5通过内外螺纹装配连接。
[0060]
步骤3.成像系统的集成。具体包括:
[0061]
a.a5与a7通过胶水连接;
[0062]
b.a7与a8通过螺纹实现调焦。
[0063]
步骤4.实时成像。
[0064]
通过软件使得cmos/ccd芯片a8开始工作,此时便可实时成像现实图像。实时成像实例(月亮)如图12所示。
[0065]
本发明解决了平面分布的图像传感器难以与曲面分布的微透镜匹配的问题,能够
对现实图像进行实时采集,而非对预设图像进行还原,同时避免了复杂的图像还原程序,提高了系统的可靠性。实现了人工复眼成像系统的微型集成,该集成系统能在真实环境中使用,同时其尺寸较小,应用范围更大;该系统所需的基本材料均为市场上常见且极为便宜材料,同时由于减小了整体尺寸,对cmos/ccd芯片的面积要求也大大减小,因此降低了成本。
[0066]
在以上的描述中阐述了很多具体细节以便于充分理解本发明。但是以上描述仅是本发明的较佳实施例而已,本发明能够以很多不同于在此描述的其它方式来实施,因此本发明不受上面公开的具体实施的限制。同时任何熟悉本领域技术人员在不脱离本发明技术方案范围情况下,都可利用上述揭示的方法和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1