阵列脉冲成像方法、装置、设备、存储介质及程序产品与流程
本发明涉及光学成像、微波成像、雷达探测、声呐、超声成像以及基于声、光、电、磁等媒介的目标探测、成像识别、无线通信,具体涉及一种阵列脉冲成像方法、装置、设备、存储介质及程序产品及其在上述各领域中的应用。
背景技术:
1、在远程目标探测中,通常采用脉冲体制实孔径相控阵雷达,探测雷达发射脉冲探测信号,接收目标回波脉冲信号,通过测量脉冲延迟获得目标的距离信息,通过发射波束指向确定目标的角度信息。为了提升目标探测能力和抗干扰能力,现代雷达越来越多的适用数字波束合成技术(digital beam forming,dbf)进行空域成像,但合成的波束数量越多,所需的硬件计算资源便越多,由于实际硬件运算资源和成本的限制,通常合成的波束数量极其有限。
2、若能够充分利用有限的硬件资源,实现更多的波束数量,使波束数量不再受到硬件计算资源的严重制约,因而需要开发一种更高效的成像算法,能够利用有限的硬件计算资源,采用高效并行算法,实现超高数量的波束合成和快速成像。
技术实现思路
1、为了解决数字阵列脉冲探测快速成像难题,本发明提供一种阵列脉冲成像方法、装置、设备、存储介质及程序产品。具体方案如下:
2、本技术的第一方面提供了一种阵列脉冲成像方法,应用于阵列脉冲成像装置、电子设备和存储介质,所述方法包括:
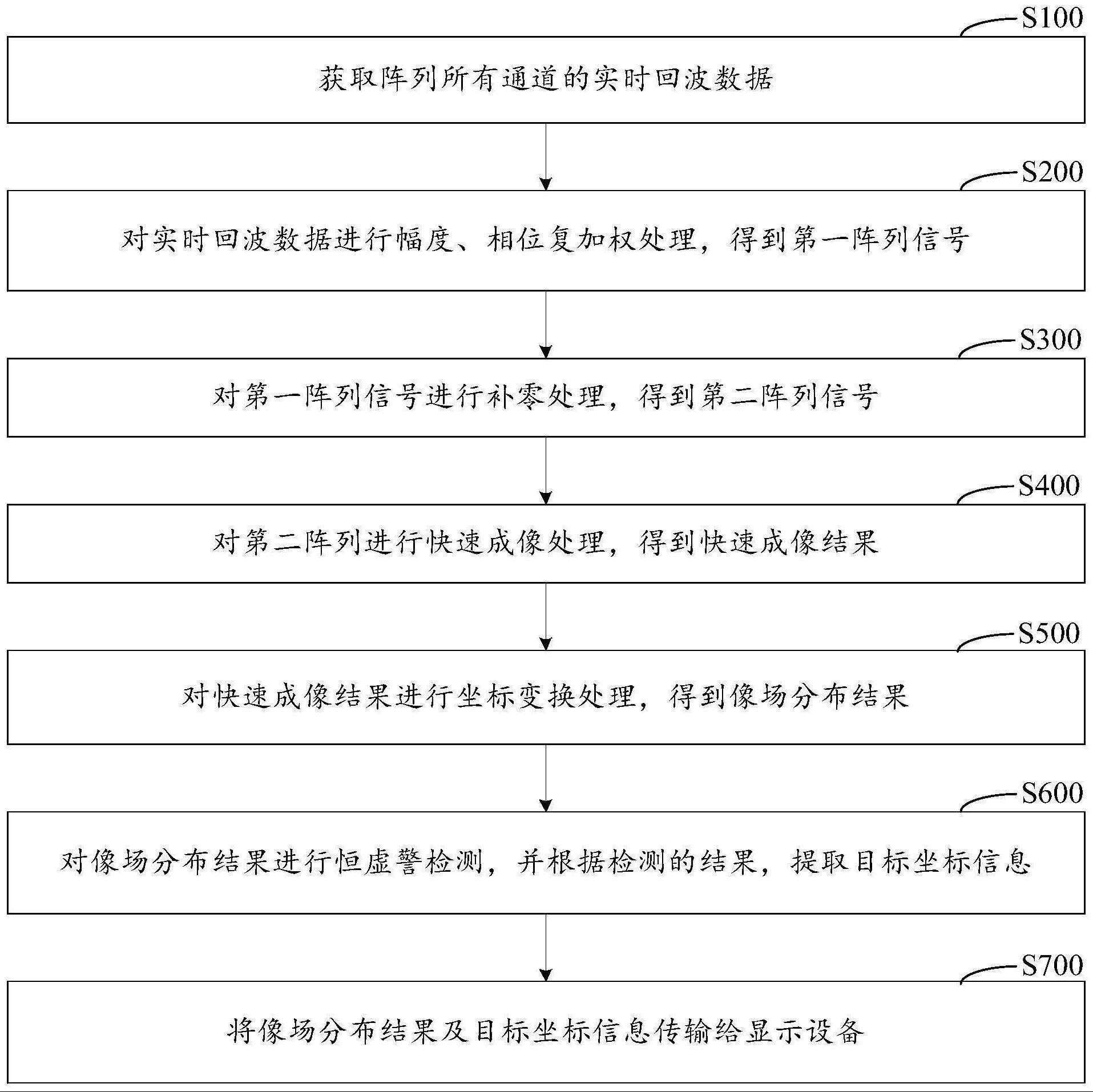
3、获取阵列所有通道的实时回波数据;
4、对所述实时回波数据进行幅度、相位复加权处理,得到第一阵列信号;
5、对所述第一阵列信号进行补零处理,得到第二阵列信号;
6、对所述第二阵列进行快速成像处理,得到快速成像结果;
7、对所述快速成像结果进行坐标变换处理,得到像场分布结果;
8、对所述像场分布结果进行恒虚警检测,并根据检测的结果,提取目标坐标信息;
9、将所述像场分布结果及所述目标坐标信息传输给显示设备。
10、其中,所述获取阵列所有通道的实时回波数据的步骤,包括:
11、对阵列所有通道接收的回波信号进行放大、变频、滤波、匹配滤波和ad变换处理,得到所述实时回波数据;所述实时回波数据包括i/q双通道信息的数字复信号。
12、其中,对所述实时回波数据进行幅度、相位复加权处理的步骤,包括:
13、根据下式对各通道的实时回波数据进行复加权处理:
14、
15、式中,s1为通道原始数据,s2为复加权后的信号,a为阵列单元幅度加权系数,φs为扫描相位加权系数,j为虚数单位,e为欧拉常数。其中,采用不同分布的幅度加权系数a,可改善成像底噪,可根据需要选择均匀分布、余弦加权、汉明窗、taylor分布、切比雪夫分布及混合加权方法。采用不同的扫描相位加权系数φs,可改变成像系统的中心视角方向,扫描相位加权系数φs可根据下式确定:
16、φs=mηxkδxsinθx0+nηykδysinθy0;
17、其中,m、n分别为阵列单元x方向与y方向的序号,为波数,λ为波长,π为圆周率,δx、δy分别为x方向、y方向的阵列单元间距,θx0、θy0分别为中心视角方向对应的方位角和俯仰角,符号sin表示正弦函数,ηx、ηy分别为x方向、y方向的扫描属性参数,根据成像系统的特性选择不同的值,如果某一成像扫描方向的阵列单元同时接收目标信号,则选择对应的ηx或ηy的值为1;如果某一成像扫描方向的阵列单元依次发射和接收目标信号,则选择对应的ηx或ηy的值为2。
18、检测成像系统的中心视角方向与波束指向是否一致,若否,则采用扫描相位加权算法对所述实时回波数据进行相位加权处理,得到所述第一阵列信号;若是,则将所述幅度加权处理后的阵列信号确认为所述第一阵列信号。具体地,对于发射和接收时阵列单元相移不变的成像系统,所述成像系统的默认中心视角方向与发射波束指向一致,可通过扫描相位加权改变中心视角方向;若不改变默认的中心视角方向,可仅执行幅度加权处理的步骤。
19、其中,对第一阵列信号进行补零处理,包括:
20、根据下式评估满足成像分辨率要求的阵列规模:
21、
22、式中,l为满足分辨率要求的阵列规模,δ为阵列单元间距,θ为成像角度分辨率。对于二维阵列,如果行或列的单元数量小于l,则需要二维阵列信号构成的二维矩阵进行补零。对于一维阵列,如果阵列单元数量小于l,同样需要进行补零处理。
23、其中,对第二阵列信号进行快速成像处理,包括:
24、根据下式对第二阵列信号进行快速运算:
25、
26、其中:符号表示高效并行算法函数,包含一维或二维fft、ifft、非均匀fft、稀疏fft,s3为第二阵列信号(即补零后的阵列信号),p(ωx,ωy)为谱域像,ωx、ωy分别为x方向、y方向的谱域坐标。对于二维阵列,采用二维快速算法进行处理,对于一维阵列,则采用一维快速算法进行处理。
27、上述计算结果对应的ωx、ωy取值范围为:ωx∈[0,2π]、ωy∈[0,2π],进行fftshift运算后将ωx、ωx取值范围变换为:ωx∈[-π,π]、ωy∈[-π,π]:
28、p(ωx,ωy)=fftshift[p(ωx,ωy)]。
29、其中,对快速成像结果进行坐标变换获得像场分布,包括:
30、对于ifft类的高效并行算法,采用下式将像场谱域坐标转换为角度坐标:
31、
32、对于fft类的高效并行算法,采用下式将像场谱域坐标转换为角度坐标:
33、
34、式中,θx、θy分别为方位角坐标和俯仰角坐标,符号sin-1表示反正弦函数。
35、对于一维阵列,则仅对一维线阵方向的坐标进行转换即可。
36、其中,对所述像场分布结果进行恒虚警检测,并根据检测的结果,提取目标坐标信息的步骤,包括:
37、基于单元平均法对所述像场分布结果进行目标检测,对超过检测门限的待处理目标通过计算回波延时获得相应的距离坐标;
38、通过提取对应所述待处理目标的像点所在的角度坐标,获得对应所述待处理目标的方位角坐标和俯仰角坐标;所述目标坐标信息包括对应所述待处理目标的距离坐标、方位角坐标和俯仰角坐标。
39、其中,将所述像场分布结果及所述目标坐标信息传输给显示设备的步骤之后,包括:
40、向人机交互接口传输请求指令,所述请求指令用于指示用户通过所述人机交互接口操作所述像场分布结果和/或所述目标坐标信息。
41、本技术的第二方面提供了一种阵列脉冲成像装置,包括收发阵列模块、信号处理模块和显示模块:
42、所述收发阵列模块用于处理得到阵列所有通道的实时回波数据,并将所述实时回波数据传输给信号处理模块;所述显示模块用于接收所述信号处理模块传输的像场分布结果和目标坐标信息,并对所述像场分布结果和所述目标坐标信息进行显示;
43、信号处理模块,用于执行上述任意一项所述的阵列脉冲成像方法的步骤。
44、本技术的第三方面提供了一种电子设备,包括:
45、所述电子设备包括人机交互接口、总线、存储介质、处理器、可编程逻辑器件、存储在所述存储介质上并可在所述处理器和可编程逻辑器件上运行的计算机程序,所述显示模块用于接收并显示所述像场分布结果和目标坐标信息;所述人机交互接口用于供用户操作所述像场结果和/或所述目标坐标信息;所述总线用于连接处理器、可编程逻辑器件和存储介质;所述存储介质用于存储计算机程序、固件和指令;所述处理器、可编程逻辑器件用于执行存储在存储介质上的计算机程序、固件和指令;所述计算机程序、固件和指令由所述处理器、可编程逻辑器件加载并执行以实现本技术第一方面中的阵列脉冲成像方法。
46、本技术的第四方面提供了一种计算机可读存储介质,包括:
47、其上存储有计算机程序、固件和指令,所述计算机程序、固件和指令被处理器、可编程逻辑器件执行时,实现本技术第一方面中的阵列脉冲成像方法。
48、本技术的第五方面提供了一种计算机程序产品,包括:
49、包括计算机程序、固件和指令,所述计算机程序、固件和指令被处理器或可编程逻辑器件执行时,实现本技术第一方面中的阵列脉冲成像方法。
50、另外,本发明方法具有良好的应用前景,可广泛应用于以声、光、电、磁等为媒介的目标探测及无线通信技术领域,当探测媒介为电磁波时,本技术适用于微波成像、雷达探测、无线通信、合成孔径雷达、逆合成孔径雷达;当探测媒介为声波、超声波时,本技术适用于声呐、超声成像、合成孔径声呐;当探测媒介为光时,本技术适用于光学成像、合成孔径光学成像。
51、上述的阵列脉冲成像方法的各实施例中,通过获取阵列所有通道的实时回波数据;对所述实时回波数据进行幅度、相位复加权处理,得到第一阵列信号;对所述第一阵列信号进行补零处理,得到第二阵列信号;对所述第二阵列进行快速成像处理,得到快速成像结果;对所述快速成像结果进行坐标变换处理,得到像场分布结果;对所述像场分布结果进行恒虚警检测,并根据检测的结果,提取目标坐标信息;将所述像场分布结果及所述目标坐标信息传输给显示设备,实现高效的阵列脉冲成像。本技术通过设置上述执行步骤,能够充分利用有限的硬件资源,实现更多的波束数量的合成和快速成像,使波束数量不再受到硬件计算资源的严重制约,提高了阵列脉冲成像的效率。
- 还没有人留言评论。精彩留言会获得点赞!