一种采煤机动基座初始对准方法
1.本发明涉及采煤机基座的定位领域,具体为一种采煤机动基座初始对准方法,应用于采煤机惯导里程计定位定姿。
背景技术:
2.煤炭是中国的主要能源,目前在一次能源中占比超过50%,在未来一段时间内,煤炭仍是主要的能源资源。随着矿业的发展,煤矿事故频繁发生,国家快速构建安全、高效、清洁、可持续的现代能源体系,作为其重要内容的煤炭开采智能化已成为煤炭工业发展的需求和必然方向。煤矿开采技术趋于无人化、智能化。
3.长期以来,我国煤矿开采经历了炮采、普采、高档普采和综采,开采效率逐步提高。但煤矿井工开采环境复杂,伴随着我国煤矿开采规模的不断扩大、开采深度的日渐增加,安全生产的问题也日益突出。因此,为了解决我国煤矿安全事故频发问题,同时进一步提高煤炭生产效率,降低煤炭生产成本,必须要大力发展自动化、智能化、无人化开采技术,并通过研发新技术来提高煤矿综采工作面生产设备的自动化与智能化水平,进而实现智能开采与智慧矿山的远期目标。目前井下煤炭开采的主要方式为综采,即综合机械化采煤,工作面是煤矿生产过程中最前沿、最危险也最复杂的工作地点,工作面上包含数量众多的生产设备,其中直接用来煤炭生产的机械设备为:采煤机、液压支架和刮板输送机,简称工作面“三机”。由煤矿工人对“三机”进行单独操控仅能实现工作面生产过程的机械化及局部的自动化。要实现综采工作面的高度自动化与智能化,首先要实现工作面生产设备工作状态的智能化感知。“三机”之间存在相互约束的关系。事实上,缺少以实时、精确的采煤机运行姿态信息为基础的智能化感知能力一直是阻碍综采工作面智能化发展的重要因素。
4.惯性导航在采煤机上的应用已成为无人和智能采煤的重要采矿技术之一,用于采煤机的快速有效自主定位。惯性导航已经在采煤机定位技术上成为了不可或缺的一环。受煤矿特殊环境的影响,采煤机采煤时环境恶劣,伴随大量噪声且为晃动基座,无法使用外部信息,例如gps等。对于惯性导航系统,初始对准是确定初始值,例如初始时刻的姿态矩阵。在初始对准中,利用惯性元件的输出信息,选择适当的滤波方法进行初始对准。而当前惯性导航系统随着时间的增加误差累积越来越大,初始对准的精度直接影响着定位精度。
5.因此,亟待研究一种精确度高的晃动基座的初始对准方法,以解决上述问题。
技术实现要素:
6.本发明为了解决当前国内采煤机在井下的工作环境特殊,采煤机晃动基座初始对准无法借助外界信息进行修正、定位精度不足、稳定性较差的问题,提供了一种采煤机动基座初始对准方法。
7.传统的初始对准过程一般包含两个阶段,一个是粗对准阶段,一个是精对准阶段。要想获得精确的精对准,必须在有一定精度的粗对准情况下才能进行。通过滤波模型估计失准角,粗对准是必不可免的。而在载体运动的情况下,难以获得粗略的初始姿态矩阵,那
么实现精对准就是一项非常困难的课题。一些研究所提出的新对准方法是以惯性坐标系作为参考基准,基本原理是:以陀螺测量输出跟踪惯性坐标系的变化,将加速度计输出在惯性系中投影,当滤除运载体对地加速度影响后,可“观测”到地球自转引起重力加速度g在惯性系中缓慢漂移旋转,g的漂移是在以地球自转轴为主轴的一个锥面内,如图2,最终可从g的漂移图中确定出地理北向。
8.本发明是通过如下技术方案来实现的:一种采煤机动基座初始对准方法,综采工作面上设置有采煤机、刮板输送机与液压支架,采煤机骑行在刮板输送机上,刮板输送机沿工作面截割方向放置,置于液压支架前,液压支架通过液压缸推动刮板输送机移动,向前推进;捷联惯导系统安装在采煤机内部,里程计与采煤机齿轨轮轴连接;通过惯导解算采煤机位姿信息,卡尔曼滤波融合惯导与里程计单位时间内位置信息,利用闭关反馈的方式校正惯导与里程计的误差参数,输出采煤机的位姿,具体包括如下步骤:
9.(1)引入以下坐标系并定义以及给出静基座下传统解析式初始对准算法:
10.①
地心惯性坐标系,即i系:oxi轴在赤道平面内且指向春分点,ozi轴指向地球自转方向,三轴构成右手坐标系;
11.②
地球坐标系,即e系:oxe轴在赤道平面内且指向中央子午线,oze轴沿地球自转方向,三轴构成右手坐标系,e系与地球固连,e系相对于i系的转动角速率即为地球自转角速率w
ie
;
12.③
选取东北天enu坐标系为导航坐标系,即n系;
13.④
定义“右前上rfu”坐标系为捷联惯导坐标系,即b系,或称为运载体坐标系;
14.⑤
初始时刻惯性坐标系,即i0系:在初始对准起始时刻,即t=t0=0时;
15.⑥
初始时刻地球坐标系,即e0系:原点为地球中心,ox
e0
轴在赤道平面内且指向初始对准开始时刻的当地子午线,oz
e0
沿地球自转方向,三轴构成右手坐标系,e0系也与地球固连,并且e0系与i0系之间方位关系是前者只绕后者的oz
i0
轴转动了w
ie
t角度;
16.⑦
初始时刻导航坐标系,即n0系:把初始对准开始时刻的导航坐标系定义为n0系,它相对地球表面固定不动,即不随捷联惯导在地球表面运动而运动;
17.⑧
初始时刻捷联惯导惯性坐标系,即i
b0
系:在t0时刻i
b0
系重合于b系,初始对准开始后i
b0
系不随捷联惯导转动,即在惯性空间中保持指向不变;
18.(2)里程计辅助动基座初始对准算法:
19.首先给出捷联惯性导航系统基本方程如下:
[0020][0021][0022]
将(2-2)式进行变形得到:
[0023][0024]
由两边微分可得将式(2-3)改写成:
[0025][0026]
两边同时左乘上式合并化简为:
[0027][0028]
对式(2-5)两边积分得到:
[0029][0030]
在采煤机低速运动的环境中,将忽略,化简式(2-6)得:
[0031][0032]
其中带入(2-7)化简后得:
[0033][0034][0035]
其中,
[0036][0037][0038]
在式(2-9)中,分别取t=t
l
和t=tm两个对准过程中的不同时刻,如中间时刻和末了时刻,则有再利用矩阵构造算法可立即求得常值矩阵即:
[0039][0040]
设纬度为l0,经度为λ0,其中可以利用陀螺输出的角运动信息,通过捷联惯导姿态更新算法实时求得,即表示由陀螺测量输出构成的反对称矩阵,并且可知对准初始时刻的矩阵初值为单位矩阵,vb代表里程计三个方向的速度,由于采煤机在行进过程中,受到轨道的约束,采煤机右侧与天向输出速度可设为0,则在煤矿实际应用中,初始对准时捷联惯组移动无法获取实时的位置信息,即以代替构造的表达式如下:
[0041][0042]
动基座初始对准算法中将初始对准姿态矩阵的实现分解成和三部分,它们均以惯性坐标系作为参考基准,解决动基座角运动和线运动的干扰影响;
[0043]
通过以下公式对进行三个欧拉角求解则可得到初始对准后的三个姿态角,包括俯仰角θ、滚转角γ、偏航角
[0044][0045]
经过初始对准时间10min后,对准精度达到0.7
°
~1.5
°
。
[0046]
与现有技术相比本发明具有以下有益效果:本发明所提供的一种采煤机动基座初始对准方法,基于煤矿井下特殊环境,无法使用外界信息源对捷联惯性导航进行辅助这一特殊情况,提出采用里程计辅助捷联惯性导航进行初始对准的算法;本发明利用里程计速度辅助,无需经过粗对准阶段,直接实现sins动基座精确初始对准的问题,该方法不仅适用于晃动干扰基座还适用于运动基座的情况。
附图说明
[0047]
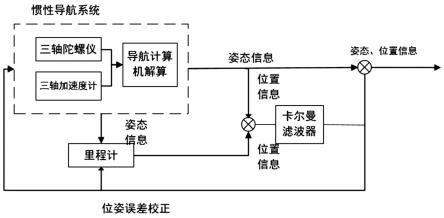
图1为本发明的里程计惯导系统原理图。
[0048]
图2为惯性系中g的锥面运动图。
具体实施方式
[0049]
以下结合具体实施例对本发明作进一步说明。
[0050]
一种采煤机动基座初始对准方法,综采工作面上设置有采煤机、刮板输送机与液压支架,采煤机骑行在刮板输送机上,刮板输送机沿工作面截割方向放置,置于液压支架前,液压支架通过液压缸推动刮板输送机移动,向前推进;捷联惯导系统安装在采煤机内部,里程计与采煤机齿轨轮轴连接;通过惯导解算采煤机位姿信息,卡尔曼滤波融合惯导与里程计单位时间内位置信息,利用闭关反馈的方式校正惯导与里程计的误差参数,输出采煤机的位姿,如图1所示,具体包括如下步骤:
[0051]
(1)引入以下坐标系并定义以及给出静基座下传统解析式初始对准算法:
[0052]
①
地心惯性坐标系,即i系:oxi轴在赤道平面内且指向春分点,ozi轴指向地球自转方向,三轴构成右手坐标系;
[0053]
②
地球坐标系,即e系:oxe轴在赤道平面内且指向中央子午线,oze轴沿地球自转方向,三轴构成右手坐标系,e系与地球固连,e系相对于i系的转动角速率即为地球自转角速率w
ie
;
[0054]
③
选取东北天enu坐标系为导航坐标系,即n系;
[0055]
④
定义“右前上rfu”坐标系为捷联惯导坐标系,即b系,或称为运载体坐标系;
[0056]
⑤
初始时刻惯性坐标系,即i0系:在初始对准起始时刻,即t=t0=0时;
[0057]
⑥
初始时刻地球坐标系,即e0系:原点为地球中心,ox
e0
轴在赤道平面内且指向初始对准开始时刻的当地子午线,oz
e0
沿地球自转方向,三轴构成右手坐标系,e0系也与地球固连,并且e0系与i0系之间方位关系是前者只绕后者的oz
i0
轴转动了w
ie
t角度;
[0058]
⑦
初始时刻导航坐标系,即n0系:把初始对准开始时刻的导航坐标系定义为n0系,它相对地球表面固定不动,即不随捷联惯导在地球表面运动而运动;
[0059]
⑧
初始时刻捷联惯导惯性坐标系,即i
b0
系:在t0时刻i
b0
系重合于b系,初始对准开始后i
b0
系不随捷联惯导转动,即在惯性空间中保持指向不变;
[0060]
(2)里程计辅助动基座初始对准算法:
[0061]
首先给出捷联惯性导航系统基本方程如下:
[0062][0063][0064]
将(2-2)式进行变形得到:
[0065][0066]
由两边微分可得将式(2-3)改写成:
[0067][0068]
两边同时左乘上式合并化简为:
[0069][0070]
对式(2-5)两边积分得到:
[0071][0072]
在采煤机低速运动的环境中,将忽略,化简式(2-6)得:
[0073][0074]
其中带入(2-7)化简后得:
[0075][0076][0077]
其中,
[0078][0079][0080]
在式(2-9)中,分别取t=t
l
和t=tm两个对准过程中的不同时刻,如中间时刻和末
了时刻,则有再利用矩阵构造算法可立即求得常值矩阵即:
[0081][0082]
设纬度为l0,经度为λ0,其中可以利用陀螺输出的角运动信息,通过捷联惯导姿态更新算法实时求得,即表示由陀螺测量输出构成的反对称矩阵,并且可知对准初始时刻的矩阵初值为单位矩阵,vb代表里程计三个方向的速度,由于采煤机在行进过程中,受到轨道的约束,采煤机右侧与天向输出速度可设为0,则在煤矿实际应用中,初始对准时捷联惯组移动无法获取实时的位置信息,即以代替构造的表达式如下:
[0083][0084]
动基座初始对准算法中将初始对准姿态矩阵的实现分解成和三部分,它们均以惯性坐标系作为参考基准,解决动基座角运动和线运动的干扰影响;
[0085]
通过以下公式对进行三个欧拉角求解则可得到初始对准后的三个姿态角,包括俯仰角θ、滚转角γ、偏航角
[0086][0087]
经过初始对准时间10min后,对准精度达到0.7
°
~1.5
°
,即1
°
左右。
[0088]
本发明要求保护的范围不限于以上具体实施方式,而且对于本领域技术人员而言,本发明可以有多种变形和更改,凡在本发明的构思与原则之内所作的任何修改、改进和等同替换都应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1