一种基于智能自动消防机器人的耐高温检测设备的制作方法
1.本发明涉及机器人检测技术领域,具体而言,涉及一种基于智能自动消防机器人的耐高温检测设备。
背景技术:
2.消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用,在一些缺氧、高温的危险环境下,能够代替消防员进行作业,为了保障消防机器人可以在高温的情况下进行消防工作,为此检测消防器机人的耐高温性能,是不可缺少的重要一环。
3.现有的检测方式,为将消防机器人投放至高温的环境下,通过人为观察对机器人进行检测,但这种检测存在片面性,因消防器机人的功能不同,为此形状材质也大不相同,在火场内作业时,会存在移动的方式,为此机器人自身不同部位所承受的热度也大不相同,但人为的检测方法单一,无法得到确切的数值从而对机器人部位的承受点进行加固,同时由于火场的不确定性,从而内部的火势也存在不定性,现有的检测方式不能很好的将火灾内部的环境呈现出来,从而对机器人的耐高温检测同样存在片面性,使检测的数据准确度低下。
技术实现要素:
4.(一)解决的技术问题针对现有技术的将消防机器人投放至高温的环境下,通过人为观察对机器人进行检测,但这种检测存在片面性,因消防器机人的功能不同,为此形状材质也大不相同,在火场内作业时,会存在移动的方式,为此机器人自身不同部位所承受的热度也大不相同,但人为的检测方法单一,无法得到确切的数值从而对机器人部位的承受点进行加固,同时由于火场的不确定性,从而内部的火势也存在不定性,现有的检测方式不能很好的将火灾内部的环境呈现出来,从而对机器人的耐高温检测同样存在片面性,使检测的数据准确度低下的不足,本发明提供了一种基于智能自动消防机器人的耐高温检测设备。
5.(二)技术方案为实现上述目的,本发明采取的技术方案为:一种基于智能自动消防机器人的耐高温检测设备,包括检测房,所述检测房的下端固定安装有底板,所述检测房的顶端固定安装有燃气存筒,所述燃气存筒上设置有燃气填充口,所述燃气存筒的两侧均固定安装有第一燃气输送管道,所述第一燃气输送管道固定贯穿于检测房的顶部,所述检测房的两侧均固定安装有若干个风机,所述检测房的前端设置有第一电动推门,所述检测房的内部设置有挡墙,所述挡墙固定连接在底板的上端,所述挡墙上设置有温度检测组件,所述检测房的内部两侧还设置有两个第二电动推门,所述第二电动推门固定连接在底板上,所述检测房内部还设置有两个侧边安放支架和两个下侧安放支架,两个所述侧边安放支架和两个下侧安放支架均固定安装在底板的上表面,且两
个所述下侧安放支架的两端均固定连接有两个侧边安放支架,每个所述下侧安放支架和每个侧边安放支架上固定安装有若干个喷枪组件,所述底板的上表面还安装有驱动组件。
6.作为优选,每个所述侧边安放支架和每个所述下侧安放支架内部均开设有燃气通孔,每个所述侧边安放支架的上端与第一燃气输送管道相通。
7.作为优选,所述温度检测组件包括若干个温度检测仪,所述挡墙的后端固定连接有固定板,所述固定板面向第一电动推门的一侧固定连接有若干个温度检测仪,所述挡墙上固定贯穿有若干个导热杆,每个所述导热杆的端部贴紧于温度检测仪的检测面上,每个所述导热杆的外部设置有隔温套,所述隔温套固定贯穿于挡墙。
8.作为优选,所述喷枪组件包括底盘和喷枪外壳,每个所述底盘分别固定连接在侧边安放支架和下侧安放支架上,每个所述底盘的下端均固定连接有第一燃气输送口,每个所述第一燃气输送口分别固定贯穿于侧边安放支架和下侧安放支架上且端部位于燃气通孔内,每个所述底盘的上端均固定连接有喷枪外壳。
9.作为优选,每个所述喷枪外壳的一侧开设有活动槽,所述喷枪外壳的外侧还设置有刻度,所述活动槽上滑动连接有二号杆,所述二号杆的端部固定连接有齿柱。
10.作为优选,所述底盘的上端以底盘的圆心呈环形等距固定连接有支杆,每个所述支杆上均转动连接有转轮,每个所述转轮的一半侧边均设置有齿牙,所述齿牙与齿柱啮合连接。
11.作为优选,每个所述转轮的下端均设置有第二燃气输送口,每个所述第二燃气输送口的下端均固定连接有第二燃气输送管道,每个所述第二燃气输送管道的端部均连接在第一燃气输送口上,每个所述转轮的上端均固定连接有喷枪。
12.作为优选,所述驱动组件包括有电机,所述电机固定连接在电机安置台的上端,所述电机的端部固定连接有第一滚轮,所述挡墙转动贯穿有丝杆,所述丝杆的末端固定连接有第二滚轮,所述第一滚轮和第二滚轮之间设置有用于驱动的皮带。
13.作为优选,所述丝杆上套设有丝杆套,所述丝杆套的一侧固定连接有轴套,所述轴套上转动连接有底杆,所述底杆活动连接在滑槽上,所述滑槽设置在底板的上表面,所述底杆的顶端固定连接有齿轮。
14.作为优选,所述底板的上表面还通过固定杆连接有呈对称设置的两个齿杆,两个所述齿杆之间啮合连接有齿轮,所述齿轮的上端固定连接有一号杆,所述一号杆的上端固定连接有安装板,所述安装板的上端固定连接有消防机器人固定卡爪。
15.与现有技术相比,本发明具有如下有益效果:1、将消防机器人通过消防机器人固定卡爪固定在安装板上,丝杆套在丝杆上移动从而带动消防机器人在检测房内部在水平移动的时候可以自身的转动,并且设有的齿杆与齿轮的长度为在齿轮从齿杆边缘转动到另一侧的边缘齿轮旋转的次数为整数,从而使消防机器人在转动到挡墙时可以使后背贴合在挡墙上,从而模拟机器人在火场中实施消防作业的场景,使检测的效果贴合实际,最终检测出的数据均有精准性。
16.2、设有的多个喷枪呈环形设置在底盘,通过移动二号杆可以带动喷枪的输出口面朝的方向,二号杆的表面固定有吸铁石,从而可以贴紧喷枪外壳的活动槽上,同时设有的刻度,通过测量得出,在二号杆移动到刻度对应的数字时,即为喷枪旋转的角度,从而使喷枪所喷出的火焰呈分散或者集中设置,并且设有的风机可以与喷枪配合,从而模拟出不同场
景火势的局势,使设备在检测消防机器人时更加的具体。
17.3、在消防机器人贴紧在挡墙上时,设有的导热杆对应消防机器人的身体的各个部位,通过导热杆将热量传递到温度检测仪上,同时设有的隔温套,使相邻的导热杆之间的热量隔离,从而使测量的数据具有精准性,进而可以得到消防机器人在火场作业时,各个部位所承受的不同温度,进行后续的改进,提高了设备的实用性。
附图说明
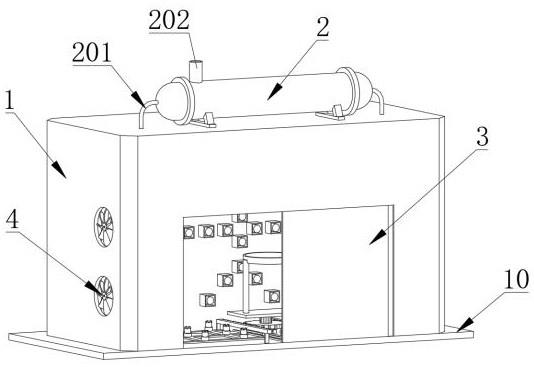
18.图1为本发明一种基于智能自动消防机器人的耐高温检测设备的结构示意图;图2为本发明一种基于智能自动消防机器人的耐高温检测设备的检测房内部的结构示意图;图3为本发明一种基于智能自动消防机器人的耐高温检测设备的后视的结构示意图;图4为本发明一种基于智能自动消防机器人的耐高温检测设备的挡墙的结构示意图;图5为本发明一种基于智能自动消防机器人的耐高温检测设备的驱动组件的结构示意图;图6为本发明一种基于智能自动消防机器人的耐高温检测设备的图5中b处放大的结构示意图;图7为本发明一种基于智能自动消防机器人的耐高温检测设备的图3中a处放大的结构示意图;图8为本发明一种基于智能自动消防机器人的耐高温检测设备的温度检测组件的结构示意图;图9为本发明一种基于智能自动消防机器人的耐高温检测设备的喷枪组件的结构示意图;图10为本发明一种基于智能自动消防机器人的耐高温检测设备的喷枪的结构示意图;图11为本发明一种基于智能自动消防机器人的耐高温检测设备的转轮的结构示意图。
19.图中:1、检测房;2、燃气存筒;201、第一燃气输送管道;202、燃气填充口;3、第一电动推门;4、风机;5、第二电动推门;6、温度检测组件;601、隔温套;602、温度检测仪;603、导热杆;7、喷枪组件;701、喷枪外壳;702、底盘;703、第一燃气输送口;704、活动槽;705、二号杆;706、刻度;707、支杆;708、转轮;709、喷枪;710、齿牙;711、第二燃气输送口;712、第二燃气输送管道;713、齿柱;8、侧边安放支架;801、燃气通孔;9、驱动组件;901、安装板;902、消防机器人固定卡爪;903、电机安置台;904、电机;905、第一滚轮;906、丝杆;907、第二滚轮;908、皮带;909、固定杆;910、齿杆;911、丝杆套;912、底杆;913、齿轮;914、轴套;915、滑槽;916、一号杆;10、底板;11、挡墙;12、下侧安放支架;13、固定板。
具体实施方式
20.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,
显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
21.如图1至11所示,一种基于智能自动消防机器人的耐高温检测设备,包括检测房1,检测房1的下端固定安装有底板10,检测房1的顶端固定安装有燃气存筒2,燃气存筒2上设置有燃气填充口202,燃气存筒2的两侧均固定安装有第一燃气输送管道201,第一燃气输送管道201固定贯穿于检测房1的顶部,检测房1的两侧均固定安装有若干个风机4,检测房1的前端设置有第一电动推门3,检测房1的内部设置有挡墙11,挡墙11固定连接在底板10的上端,挡墙11上设置有温度检测组件6,检测房1的内部两侧还设置有两个第二电动推门5,第二电动推门5固定连接在底板10上,检测房1内部还设置有两个侧边安放支架8和两个下侧安放支架12,两个侧边安放支架8和两个下侧安放支架12均固定安装在底板10的上表面,且两个下侧安放支架12的两端均固定连接有两个侧边安放支架8,每个下侧安放支架12和每个侧边安放支架8上固定安装有若干个喷枪组件7,底板10的上表面还安装有驱动组件9。
22.在本实施例中,每个侧边安放支架8和每个下侧安放支架12内部均开设有燃气通孔801,每个侧边安放支架8的上端与第一燃气输送管道201相通。
23.在本实施例中,温度检测组件6包括若干个温度检测仪602,挡墙11的后端固定连接有固定板13,固定板13面向第一电动推门3的一侧固定连接有若干个温度检测仪602,挡墙11上固定贯穿有若干个导热杆603,每个导热杆603的端部贴紧于温度检测仪602的检测面上,每个导热杆603的外部设置有隔温套601,隔温套601固定贯穿于挡墙11,将消防机器人通过消防机器人固定卡爪902固定在安装板901上,丝杆套911在丝杆906上移动从而带动消防机器人在检测房1内部在水平移动的时候可以自身的转动。
24.在本实施例中,喷枪组件7包括底盘702和喷枪外壳701,每个底盘702分别固定连接在侧边安放支架8和下侧安放支架12上,每个底盘702的下端均固定连接有第一燃气输送口703,每个第一燃气输送口703分别固定贯穿于侧边安放支架8和下侧安放支架12上且端部位于燃气通孔801内,每个底盘702的上端均固定连接有喷枪外壳701,在消防机器人贴紧在挡墙11上时,设有的导热杆603对应消防机器人的身体的各个部位,通过导热杆将热量传递到温度检测仪602上,同时设有的隔温套601,使相邻的导热杆603之间的热量隔离,从而使测量的数据具有精准性,进而可以得到消防机器人在火场作业时,各个部位所承受的不同温度,进行后续的改进,提高了设备的实用性。
25.在本实施例中,每个喷枪外壳701的一侧开设有活动槽704,喷枪外壳701的外侧还设置有刻度706,活动槽704上滑动连接有二号杆705,二号杆705的端部固定连接有齿柱713,并且设有的齿杆910与齿轮913的长度为在齿轮913从齿杆910边缘转动到另一侧的边缘齿轮913旋转的次数为整数,从而使消防机器人在转动到挡墙11时可以使后背贴合在挡墙11上,从而模拟机器人在火场中实施消防作业的场景,使检测的效果贴合实际,最终检测出的数据均有精准性。
26.在本实施例中,底盘702的上端以底盘702的圆心呈环形等距固定连接有支杆707,每个支杆707上均转动连接有转轮708,每个转轮708的一半侧边均设置有齿牙710,齿牙710
与齿柱713啮合连接。
27.在本实施例中,每个转轮708的下端均设置有第二燃气输送口711,每个第二燃气输送口711的下端均固定连接有第二燃气输送管道712,每个第二燃气输送管道712的端部均连接在第一燃气输送口703上,每个转轮708的上端均固定连接有喷枪709。
28.在本实施例中,驱动组件9包括有电机904,电机904固定连接在电机安置台903的上端,电机904的端部固定连接有第一滚轮905,挡墙11转动贯穿有丝杆906,丝杆906的末端固定连接有第二滚轮907,第一滚轮905和第二滚轮907之间设置有用于驱动的皮带908,在消防机器人贴紧在挡墙11上时,设有的导热杆603对应消防机器人的身体的各个部位,通过导热杆将热量传递到温度检测仪602上,同时设有的隔温套601,使相邻的导热杆603之间的热量隔离,从而使测量的数据具有精准性,进而可以得到消防机器人在火场作业时,各个部位所承受的不同温度,进行后续的改进,提高了设备的实用性。
29.在本实施例中,丝杆906上套设有丝杆套911,丝杆套911的一侧固定连接有轴套914,轴套914上转动连接有底杆912,底杆912活动连接在滑槽915上,滑槽915设置在底板10的上表面,底杆912的顶端固定连接有齿轮913。
30.在本实施例中,底板10的上表面还通过固定杆909连接有呈对称设置的两个齿杆910,两个齿杆910之间啮合连接有齿轮913,齿轮913的上端固定连接有一号杆916,一号杆916的上端固定连接有安装板901,安装板901的上端固定连接有消防机器人固定卡爪902。
31.该一种基于智能自动消防机器人的耐高温检测设备的工作原理:将消防机器人通过消防机器人固定卡爪902固定在安装板901上,丝杆套911在丝杆906上移动从而带动消防机器人在检测房1内部在水平移动的时候可以自身的转动,并且设有的齿杆910与齿轮913的长度为在齿轮913从齿杆910边缘转动到另一侧的边缘齿轮913旋转的次数为整数,从而使消防机器人在转动到挡墙11时可以使后背贴合在挡墙11上,从而模拟机器人在火场中实施消防作业的场景,使检测的效果贴合实际,最终检测出的数据均有精准性。
32.设有的多个喷枪709呈环形设置在底盘702,通过移动二号杆705可以带动喷枪709的输出口面朝的方向,二号杆705的表面固定有吸铁石,从而可以贴紧喷枪外壳701的活动槽704上,同时设有的刻度706,通过测量得出,在二号杆705移动到刻度对应的数字时,即为喷枪709旋转的角度,从而使喷枪709所喷出的火焰呈分散或者集中设置,并且设有的风机4可以与喷枪709配合,从而模拟出不同场景火势的局势,使设备在检测消防机器人时更加的具体。
33.在消防机器人贴紧在挡墙11上时,设有的导热杆603对应消防机器人的身体的各个部位,通过导热杆将热量传递到温度检测仪602上,同时设有的隔温套601,使相邻的导热杆603之间的热量隔离,从而使测量的数据具有精准性,进而可以得到消防机器人在火场作业时,各个部位所承受的不同温度,进行后续的改进,提高了设备的实用性。
34.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1