一种岩体稳定性声发射监测信号的降噪方法
1.本发明涉及一种岩体稳定性声发射监测信号的降噪方法,属于岩土工程监测技术领域。
背景技术:
2.岩体稳定性与岩土工程的安全建设具有紧密联系。目前常见的岩体稳定性监测方法主要 包括摄像摄影、全球导航卫星系统和光纤测量技术等。但这些监测方法的监测精度受限于实 际地理环境与工程施工工艺。声发射信号是岩体变形破坏过程中必然产生的响应信号,通过 声发射监测技术能够监测到岩体发生的极缓慢变形破坏,监测成本相对较小,逐渐在岩体稳 定性监测预警领域得到关注与研究。但岩体变形破坏时产生的声发射信号频域信息复杂,同 时外界环境和采集系统又会引入背景噪声和各种干扰,因此必须对采集到的原信号进行降噪 处理,提取出表征岩体变形破坏时产生的声发射信号。
3.目前,声发射信号降噪方法主要集中在小波分析法和独立分量分析法。小波分析法对非 平稳随机信号具有突出优势,但去噪效果与选取地小波基函数具有较大关系,信噪比较小 时,去噪效果不理想。独立分量分析法无需选择基函数,能够在非线性、非平稳性信号分解 过程中保留信号本身的特征,但易产生模态混叠现象和虚假分量等问题。
技术实现要素:
4.本发明针对现有岩体稳定性声发射监测信号降噪方法的不足,提出了一种岩体稳定性声 发射监测信号的降噪方法,本发明对岩体稳定性声发射监测信号进行完全集成经验模态分解 (complete ensemble empirical mode decomposition with adaptive noise analysis,ceemdan) 和小波包变换(wavelet packet transform,wpt)联合降噪,能够实现良好的降噪效果,相比现 有声发射信号降噪方法,不仅具有算法完全数据驱动,不受主观因素影响,信号重构精度高 等优点,还解决了信号分解时的模态混叠与虚假分量等问题,避免了信号发生失真现象。
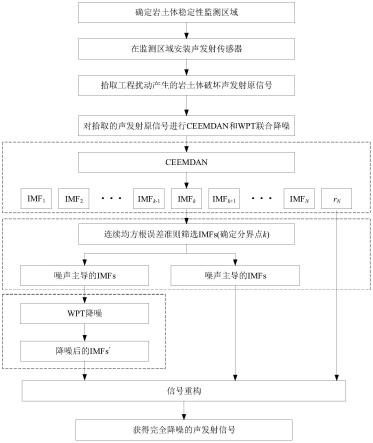
5.一种岩体稳定性声发射监测信号的降噪方法,具体步骤如下:
6.(1)基于岩体质量等级对待监测岩体进行分级,确定岩体稳定性监测区域;
7.(2)在步骤(1)的岩体稳定性监测区域安装声发射传感器;
8.(3)通过步骤(2)声发射传感器拾取工程扰动岩体破坏产生的声发射信号;
9.(4)对步骤(3)声发射传感器拾取的岩体破坏声发射信号进行完全集成经验模态分解 ceemdan和小波包变换wpt联合降噪;
10.(5)通过对步骤(4)运算后获得的分量进行信号重构,获得完全降噪的岩体稳定性声 发射监测信号;
11.(6)计算信噪比和均方误差,评价岩体稳定性声发射监测信号的降噪效果。
12.所述步骤(1)基于岩体质量进行分级,确定岩体稳定性监测区域具体为
13.将岩体地质力学分级(rock mass rating,rmr)中的ⅳ、v级岩体区域,即[rmr]值
≤40 的区域作为重点监测区域,将ⅰ、ⅱ和ⅲ级岩体区域,即[rmr]值>40的区域作为辅助监测区 域。
[0014]
所述步骤(2)安装声发射传感器的方法为
[0015]
在隧道内的掌子面与二次衬砌之间的重点监测区域沿轴向每隔3~5m布置一个监测断 面,声发射传感器安装在拱顶和拱肩上;辅助监测区域每隔3~5m布置一个监测断面,声发 射传感器安装在拱顶上;
[0016]
在边坡上的重点监测区域沿边坡走向每隔5~10m布置一个监测断面,声发射传感器安 装在每级台阶面上,辅助监测区域每隔10~20m布置一个监测断面,声发射传感器安装在每 级台阶面上。
[0017]
所述步骤(3)声发射传感器采样频率为1~10mhz,门限为20~60db,前放增益为 20~60db。
[0018]
所述步骤(4)对声发射传感器拾取的岩体破坏声发射信号进行完全集成经验模态分解 ceemdan和小波包变换wpt联合降噪的方法为
[0019]
1)对声发射传感器拾取的岩体破坏声发射原信号进行完全集成经验模态分解 ceemdan获得n个本征模态函数(intrinsic mode functions,imfs)和一个残差;
[0020]
2)确定噪声主导的imfs与信号主导的imfs分界点k,获得k个噪声主导的imfs,n
‑ꢀ
k个信号主导的imfs;
[0021]
3)对噪声主导的imfs进行小波包变换wpt降噪,获得降噪后的imf
′
s。
[0022]
所述完全集成经验模态分解ceemdan的计算方法为
[0023]
s1.基于声发射传感器拾取的岩体破坏声发射信号,建立一个添加噪声的序列,序列内 的信号为
[0024]
si(t)=s(t)+ω0εi(t),i∈{1,2,3,
…
,i}
[0025]
式中:s(t)为拾取的原信号;ε(t)为独立的高斯白噪声;ω0为噪声系数;i为序列长 度;si(t)为序列内第i个添加噪声的原信号;
[0026]
s2.对序列内的每一个信号si(t),进行经验模态分解emd,对分解获得的第一个 imf,计算其平均值:
[0027][0028]
式中:为第i个si(t)的第一个imf,i=1,2,3,...,i;i为序列长度;c1(t)c1(t)为原信号 s(t)的第一个imf;
[0029]
s(t)的第一个残差为:
[0030]
r1(t)=s(t)-c1(t)
[0031]
式中:s(t)为拾取的原信号;c1(t)为原信号s(t)的第一个imf;r1(t)为原信号s(t)的第一 个残差;
[0032]
s3.对添加噪声的残差r1+ω1e1(εi(t))序列进行分解,获得第2个imf为
[0033][0034]
式中:ej(
·
)为函数,通过经验模态分解emd提取(
·
)的第j个imf;εi(t)为第i个独立 的高斯白噪声;ω1为噪声系数;r1(t)为原信号s(t)的第一个残差;i为序列长度;c2(t)为原信 号s(t)的第2个imf;
[0035]
s(t)的第2个残差为
[0036]
r2(t)=s(t)-c2(t)
[0037]
式中:s(t)为拾取的原信号;c2(t)为原信号s(t)的第2个imf;r2(t)为原信号s(t)的第2 个残差;
[0038]
s4.计算剩余的imfs:对获得的残差,重复步骤s3,直至获得新残差的极值不超过2个, 停止计算,共获得n个imfs和一个残差。
[0039]
所述确定噪声主导的imfs与信号主导的imfs分界点k具体为通过连续均方误差准则 确定分界点k,共获得k个噪声主导的imfs,n-k个信号主导的imfs。
[0040]
进一步地,所述通过连续均方误差准则确定分界点k的计算方法为
[0041]
1)对获得的n个imfs,计算连续均方误差
[0042][0043]
式中:n为获得的imfs总数;ck(t)和c
k+1
(t)分别为第k个和第k+1个imf, k=1,2,3,...,n-1;
[0044]
2)当cmse(imfk,imf
k+1
)仅有一个极小值时,定义分界点k为
[0045][0046]
当cmse(imfk,imf
k+1
)存在多个极小值时,定义分界点k为
[0047][0048]
所述对噪声主导的imfs进行wpt降噪具体方法为
[0049]
1)计算噪声主导imfs的阈值
[0050][0051]
式中:n为噪声主导imfs的尺寸;thr为噪声主导imfs的阈值;
[0052]
2)以硬阈值函数为噪声主导的imfs的阈值函数;
[0053]
3)通过步骤1)的阈值与步骤2)的阈值函数,采用db系列小波基,对噪声主导的imfs 进行分解和重构,获得降噪后的imf
′
s。
[0054]
进一步地,所述硬阈值函数为
[0055][0056]
式中:w为噪声主导imfs分解后的小波包系数;thr为噪声主导imfs的阈值;wh为 硬阈值函数。
[0057]
所述步骤(5)岩体破坏完全降噪的声发射监测信号为
[0058][0059]
式中:c
′
(t)为降噪后的imf
′
s;c(t)为信号主导的imfs;r(t)为保留的残差;s
′
(t)为岩 体破坏完全降噪的声发射监测信号。
[0060]
所述步骤(6)信噪比计算方法
[0061]
snr=10log
10
(ps/pn)
[0062]
式中:ps为信号能量;pn为噪声能量;snr为信噪比;
[0063]
进一步地,信号能量计算方法为
[0064][0065]
式中:s
′
(t)为完全降噪的信号;ps为信号能量;
[0066]
进一步地,噪声能量计算方法为
[0067][0068]
式中:s(t)为原信号;s
′
(t)为完全降噪信号;pn为噪声能量;
[0069]
均方误差计算方法
[0070][0071]
式中:s
′
(t)为完全降噪信号;s(t)为原信号;rmse为均方误差。
[0072]
本发明的有益效果是:
[0073]
(1)本发明对岩体稳定性声发射监测信号能够实现良好的降噪效果,通过ceemdan 和wpt的联合将声发射监测信号自适应分解为若干个imfs和一个残差,并能根据imfs自 身将其分为噪声主导的imfs与信号主导的imfs,仅对噪声主导的imfs进行wpt降噪, 相比现有声发射监测信号降噪方法,算法具有完全驱动,不受主观因素影响,信号重构精度 高等优点,还解决了信号分解时的模态混叠与虚假分量等问题,避免了信号发生失真现象;
[0074]
(2)本发明可实现更为高效地岩体稳定性声发射监测信号利用率,具有运算速度快、 数据处理灵活等优点,既能对特定时间、位置的单个声发射监测信号进行单独降噪,也对某 个阶段、范围内的全部声发射监测信号实施系统性批量降噪;
[0075]
(3)本发明通过适用范围宽,可适用于隧道、基坑和边坡等不同岩土工程稳定性声发 射监测信号的降噪处理,能够提供完全降噪的声发射监测数据,为岩体稳定性监测提供准确 的数据保障。
附图说明
[0076]
图1为本发明的流程图;
[0077]
图2为本发明隧道内监测点布置示意图;
[0078]
图3为声发射传感器安装示意图(隧道);
[0079]
图4为本发明边坡上监测点布置示意图;
[0080]
图5为声发射传感器安装示意图(边坡);
[0081]
图6为声发射传感器拾取工程扰动岩体破坏产生的瞬态弹性波示意图;
[0082]
图7为ceemdan流程图;
[0083]
图8为实施例2中声发射传感器拾取的某一声发射原信号;
[0084]
图9为实施例2中对某一声发射原信号进行ceemdan获得的imfs;
[0085]
图10为实施例2中对某一声发射原信号进行ceemdan获得的残差;
[0086]
图11为实施例2中某一声发射原信号imfs的连续均方误差关系曲线;
[0087]
图12为实施例2中某一声发射原信号的噪声主导的imfs降噪后的imf
′
s;
[0088]
图13为实施例2中某一完全降噪的声发射信号;
[0089]
图中:1-声发射源、2-瞬态弹性波、3-声发射传感器、4-岩体、5-前置放大器、6-声发射 信号采集仪、7-电脑显示器、8-声发射原信号。
具体实施方式
[0090]
下面结合具体实施方式对本发明作进一步详细说明,但本发明的保护范围并不限于所述 内容。
[0091]
实施例1:如图1所示,一种岩体稳定性声发射监测信号的降噪方法,具体步骤如下:
[0092]
(1)基于岩体地质力学分级(rock mass rating,rmr)对待监测岩体进行分级,确定岩体 稳定性监测区域:将rmr中的ⅳ、v级区域,即[rmr]值≤40的区域作为重点监测区域,将
ꢀⅰ
、ⅱ和ⅲ级区域,即[rmr]值>40的区域作为辅助监测区域;
[0093]
(2)在步骤(1)的岩体稳定性监测区域,安装声发射传感器:
[0094]
在隧道内的掌子面与二次衬砌之间的重点监测区域沿轴向每隔3~5m布置一个监测断面 (见图2),声发射传感器安装在拱顶和拱肩上(见图3),辅助监测区域每隔3~5m布置一个监 测断面(见图2),声发射传感器安装在拱顶上(见图3);
[0095]
在边坡上的重点监测区域沿边坡走向每隔5~10m布置一个监测断面(见图4),声发射传 感器安装在每级台阶面上(见图5),辅助监测区域每隔10~20m布置一个监测断面(见图4), 声发射传感器安装在每级台阶面上(见图5);
[0096]
(3)通过步骤(2)安装的声发射传感器拾取工程扰动岩体破坏产生的声发射信号(见图6): 声发射系统设置采样频率为1~10mhz,门限为20~60db,前放增益为20~60db;
[0097]
(4)对步骤(3)声发射传感器拾取的岩体破坏声发射信号进行ceemdan和wpt联合降 噪:
[0098]
1)对声发射传感器拾取的岩体破坏声发射原信号进行完全集成经验模态分解 ceemdan获得n个本征模态函数(intrinsic mode functions,imfs)和一个残差;
[0099]
其中ceemdan的计算流程图(见图7),计算方法:
[0100]
s1.基于声发射传感器拾取的岩体破坏声发射信号,建立一个添加噪声的序列,序列内 的信号为
[0101]
si(t)=s(t)+ω0εi(t),i∈{1,2,3,...,i}
[0102]
式中:s(t)为拾取的原信号;ε(t)为独立的高斯白噪声;ω0为噪声系数;i为序列长 度;si(t)为序列内第i个添加噪声的原信号;
[0103]
s2.对序列内的每一个信号si(t),进行经验模态分解emd,对分解获得的第一个 imf,计算其平均值:
[0104][0105]
式中:为第i个si(t)的第一个imf,i=1,2,3,...,i;i为序列长度;c1(t)为原信号s(t) 的第一个imf;
[0106]
s(t)的第一个残差为:
[0107]
r1(t)=s(t)-c1(t)
[0108]
式中:s(t)为拾取的原信号;c1(t)为原信号s(t)的第一个imf;r1(t)为原信号s(t)
的第一 个残差;
[0109]
s3.对添加噪声的残差r1+ω11e1(εi(t))序列进行分解,获得第2个imf为
[0110][0111]
式中:ej(
·
)为函数,通过经验模态分解emd提取(
·
)的第j个imf;εi(t)为第i个独立 的高斯白噪声;ω1为噪声系数;r1(t)为原信号s(t)的第一个残差;i为序列长度;c2(t)为原信 号s(t)的第2个imf;
[0112]
s(t)的第2个残差为
[0113]
r2(t)=s(t)-c2(t)
[0114]
式中:s(t)为拾取的原信号;c2(t)为原信号s(t)的第2个imf;r2(t)为原信号s(t)的第2 个残差;
[0115]
s4.计算剩余的imfs:对获得的残差,重复步骤s3,直至获得新残差的极值不超过2 个,停止计算,共获得n个imfs和一个残差;
[0116]
2)通过连续均方误差准则确定噪声主导的imfs与信号主导的imfs分界点k,获得k 个噪声主导的imfs,n-k个信号主导的imfs:
[0117]
通过连续均方误差准则确定分界点k:
[0118]
①
对获得的n个imfs,计算连续均方误差
[0119][0120]
式中:n为获得的imfs总数;ck(t)和ck(t)分别为第k个和第k+1个imf, k=1,2,3,...,n-1;
[0121]
②
当cmse(imfk,imf
k+1
)仅有一个极小值时,定义分界点k为
[0122][0123]
当cmse(imfk,imf
k+1
)存在多个极小值时,定义分界点k为
[0124][0125]
3)对噪声主导的imfs进行小波包变换wpt降噪,获得降噪后的imf
′
s:
[0126]
对获得的k个噪声主导的imfs进行wpt降噪:
[0127]
①
计算噪声主导的imfs的阈值
[0128][0129]
式中:n为噪声主导imfs的尺寸;thr为噪声主导imfs的阈值;
[0130]
②
以硬阈值函数为噪声主导的imfs的阈值函数
[0131]
硬阈值函数为
[0132][0133]
式中:w为噪声主导imfs分解后的小波包系数;thr为噪声主导imfs的阈值;wh为硬 阈值函数;
[0134]
③
通过计算的阈值与硬阈值函数,采用db系列小波基,对噪声主导的imfs进行分
解 和重构,最终获得降噪后的imf
′
s;
[0135]
(5)通过对步骤(4)获得的各分量进行信号重构,获得完全降噪的岩体稳定性声发射监测 信号:
[0136][0137]
式中:c
′
(t)为降噪后的imf
′
s;c(t)为信号主导的imfs;r(t)为保留的残差;s
′
(t)为岩体 破坏完全降噪的声发射监测信号;
[0138]
(6)计算信噪比和均方误差,评价岩体稳定性声发射监测信号的降噪效果;
[0139]
①
计算信噪比
[0140][0141]
式中:ps为信号能量;pn为噪声能量;s
′
(t)为完全降噪的信号;s(t)为原信号;snr为 信噪比;
[0142]
②
计算均方误差
[0143][0144]
式中:s
′
(t)为完全降噪信号;s(t)为原信号;rmse为均方误差。
[0145]
实施例2:如图1所示,以云南省曲靖市会泽县矿山镇跃进坑隧道进行一种岩体稳定性 声发射监测信号的降噪方法,具体步骤如下:
[0146]
(1)基于岩体地质力学分级(rock mass rating,rmr)对待监测岩体进行分级,确定岩体 稳定性监测区域:查明隧道内完整岩石强度、岩石质量指标、节理间距、节理状态及地下水 状态评分值,在掌子面与二次衬砌之间,根据隧道内的质量等级,将rmr中的ⅳ、v级区域, 即[rmr]值≤40的区域作为重点监测区域,将ⅰ、ⅱ和ⅲ级区域,即[rmr]值>40的区域作为辅 助监测区域;
[0147]
(2)在步骤(1)的岩体稳定性监测区域,安装声发射传感器:在隧道内的掌子面与二次衬 砌之间的重点监测区域沿轴向每隔5m布置一个监测断面(见图2),声发射传感器安装在拱顶 和拱肩上(见图3),辅助监测区域每隔3m布置一个监测断面(见图2),声发射传感器安装在 拱顶上(见图3);
[0148]
(3)通过步骤(2)安装的声发射传感器拾取工程扰动岩体破坏产生的声发射信号:声发射 系统为pic-2,声发射传感器型号为r.45i-lp-ast,声发射传感器拾取工程扰动岩体破坏产 生的瞬态弹性波示意图,如图6所示,设置声发射系统采样频率为3mhz,门限为26db,前 放增益为40db,监测点a1声发射传感器拾取的某一声发射原信号如图8所示;
[0149]
(4)对步骤(3)监测点a1声发射传感器拾取的岩体破坏声发射信号进行ceemdan和 wpt联合降噪:
[0150]
1)对声发射传感器拾取的岩体破坏声发射原信号进行完全集成经验模态分解ceemdan 获得n个本征模态函数(intrinsic mode functions,imfs)和一个残差;
[0151]
ceemdan的计算流程图(见图7),以监测点a1声发射传感器拾取的某一声发射原信号 为例,ceemdan计算方法
[0152]
s1.基于声发射传感器拾取的隧道破坏声发射信号,建立一个添加噪声的序列,序列内的 信号为
[0153]
si(t)=s(t)+ω0εi(t),i∈{1,2,3,
…
,i}
[0154]
式中:s(t)为拾取的原信号;ε(t)为独立的高斯白噪声;ω0为噪声系数,取0.2;i为序 列长度,取500;si(t)为序列内第i个添加噪声的原信号;
[0155]
s2.对序列内的每一个信号si(t),进行emd,对分解获得的第一个imf,计算其平均值:
[0156][0157]
式中:为第i个si(t)的第一个imf,i=1,2,3,...,500;i为序列长度,取500;c1(t)为 原信号s(t)的第一个imf;
[0158]
s(t)的第一个残差为:
[0159]
r1(t)=s(t)-c1(t)
[0160]
式中:s(t)为拾取的原信号;c1(t)为原信号s(t)的第一个imf;r1(t)为原信号s(t)的第一 个残差;
[0161]
s3.对添加噪声的残差r1+ω1e1(εi(t))序列进行分解,获得第2个imf为
[0162][0163]
式中:ej(
·
)为函数,通过emd提取(
·
)的第j个imf;εi(t)为第i个独立的高斯白噪声; ω1为噪声系数,取0.2;r1(t)为原信号s(t)的第一个残差;i为序列长度,取500;c2(t)为原信 号s(t)的第2个imf;
[0164]
s(t)的第2个残差为
[0165]
r2(t)=s(t)-c2(t)
[0166]
式中:s(t)为拾取的原信号;c2(t)为原信号s(t)的第2个imf;r2(t)为原信号s(t)的第2 个残差;
[0167]
s4.计算剩余的imfs:对获得的残差,重复步骤s3,直至获得新残差的极值不超过2个, 停止计算,共获得12个imfs(见图9)和一个残差(见图10);
[0168][0169][0170]
2)通过连续均方误差准则确定噪声主导的imfs与信号主导的imfs分界点k,获得k个 噪声主导的imfs,n-k个信号主导的imfs:
[0171]
通过连续均方误差准则确定分界点k:
[0172]
①
对获得的12个imfs,计算连续均方误差
[0173][0174]
式中:ck(t)和c
k+1
(t)分别为第k个和第k+1个imf,k=1,2,3,...,11;
[0175]
表1 imf的连续均方误差计算结果
[0176][0177]
②
当cmse(imfk,imf
k+1
)仅有一个极小值时,定义分界点k为
[0178][0179]
imf的连续均方误差关系曲线如图11所示,由表1和图11可知,cmse(imfk,imf
k+1
) 有且仅有一个极小值,极小值为0.7853,对应的k=3,故当cmse(imfk,imf
k+1
)有且仅有一个 极小值时,定义分界点k为3,共获得3个噪声主导的imfs(imf1、imf2和imf3)和9个信号 主导的imfs(imf4~imf
12
);
[0180]
3)对获得的3个噪声主导的imfs(imf1、imf2和imf3)进行wpt降噪:
[0181]
①
计算噪声主导的imfs的阈值
[0182][0183]
式中:n为噪声主导imfs的采样点数,取4096;thr为噪声主导imfs的阈值;
[0184]
计算可得thr=4.6482;
[0185]
②
以硬阈值函数为噪声主导的imfs的阈值函数
[0186]
硬阈值函数为
[0187][0188]
式中:w为噪声主导imfs分解后的小波包系数;thr为噪声主导imfs的阈值,取4.6482; wh为硬阈值函数;
[0189]
③
通过计算的阈值thr=4.6482与硬阈值函数,采用db系列的db3小波基,对噪声主导 的imfs进行分解和重构,最终获得降噪后的imf
′
s(见图12);
[0190]
(5)通过对步骤(4)获得的各分量进行信号重构,获得完全降噪的岩体稳定性声发射监测 信号(见图13):
[0191][0192]
式中:c
′
(t)为降噪后的imf
′
s;c(t)为信号主导的imfs;r(t)为保留的残差;s
′
(t)为岩体 破坏完全降噪的声发射监测信号;
[0193]
(6)计算信噪比和均方误差,评价岩体稳定性声发射监测信号的降噪效果;
[0194]
①
计算信噪比
[0195][0196]
式中:ps为信号能量;pn为噪声能量;s
′
(t)为完全降噪的信号;s(t)为原信号;snr为 信噪比;
[0197]
②
计算均方误差
[0198][0199]
式中:s
′
(t)为完全降噪信号;s(t)为原信号;rmse为均方误差;
[0200]
计算的信噪比snr=10.2663,均方误差rmse=0.0194;由此可知,通过ceemdan和 wpt联合降噪方法计算获得的信噪比较大,同时均方误差较小,表明通过ceemdan和wpt 联合降噪方法可以进一步减弱外界环境和采集系统又会引入背景噪声和各种干扰的影响,获 得较为纯净表征岩体变形破坏时产生的声发射信号。
[0201]
实施例3:如图1所示,以云南省红河州建水(个旧)至元阳高速公路某深挖路堑边坡进行 一种岩体稳定性声发射监测信号的降噪方法,具体步骤如下:
[0202]
(1)基于岩体地质力学分级(rock mass rating,rmr)对待监测岩体进行分级:查明边坡 区域内的完整岩石强度、岩石质量指标、节理间距、节理状态及地下水状态评分值,根据边 坡区域内的岩体质量等级,将rmr中的ⅳ、v级区域,即[rmr]值≤40的区域作为重点监测 区域,将ⅰ、ⅱ和ⅲ级区域,即[rmr]值>40的区域作为辅助监测区域;
[0203]
(2)在步骤(1)的岩体稳定性监测区域,安装声发射传感器:在边坡上的重点监测区域沿 边坡走向每隔10m布置一个监测断面(见图4),声发射传感器安装在每级台阶面上(见图5), 辅助监测区域每隔20m布置一个监测断面(见图4),声发射传感器安装在每级台阶面上(见图 5);
[0204]
(3)通过步骤(2)安装的声发射传感器拾取工程扰动岩体破坏产生的声发射信号:声发射 系统为pic-2,声发射传感器型号为r.45i-lp-ast;传感器拾取工程扰动岩体破坏产生的瞬 态弹性波示意图,如图6所示,设置声发射系统采样频率为3mhz,门限为26db,前放增益 为40db;
[0205]
(4)对步骤(3)监测点b1-2声发射传感器拾取的岩体破坏声发射信号进行ceemdan和 wpt联合降噪:
[0206]
1)对声发射传感器拾取的岩体破坏声发射原信号进行完全集成经验模态分解ceemdan 获得n个本征模态函数(intrinsic mode functions,imfs)和一个残差;
[0207]
ceemdan的计算流程图(见图7),以监测点b1-2声发射传感器拾取的某一声发射原信 号为例,ceemdan计算方法
[0208]
s1.基于声发射传感器拾取的边坡破坏声发射信号,建立一个添加噪声的序列,序列内的 信号为
[0209]
si(t)=s(t)+ω0εi(t),i∈{1,2,3,...,i}
[0210]
式中:s(t)为拾取的原信号;ε(t)为独立的高斯白噪声;ω0为噪声系数,取0.2;i为序 列长度,取500;si(t)为序列内第i个添加噪声的原信号;
[0211]
s2.对序列内的每一个信号si(t),进行emd,对分解获得的第一个imf,计算其平均值:
[0212][0213]
式中:为第i个si(t)的第一个imf,i=1,2,3,...,500;i为序列长度,取500;c1(t)为 原信号s(t)的第一个imf;
[0214]
s(t)的第一个残差为:
[0215]
r1(t)=s(t)-c1(t)
[0216]
式中:s(t)为拾取的原信号;c1(t)为原信号s(t)的第一个imf;r1(t)为原信号s(t)的第一 个残差;
[0217]
s3.对添加噪声的残差r1+ω1e1(εi(t))进行分解,获得第2个imf为
[0218][0219]
式中:ej(
·
)为函数,通过emd提取(
·
)的第j个imf;εi(t)为第i个独立的高斯白噪声; ω1为噪声系数,取0.2;r1(t)为原信号s(t)的第一个残差;i为序列长度,取500;c2(t)为原信 号s(t)的第2个imf;
[0220]
s(t)的第2个残差为
[0221]
r2(t)=s(t)-c2(t)
[0222]
式中:s(t)为拾取的原信号;c2(t)为原信号s(t)的第2个imf;r2(t)为原信号s(t)的第2 个残差;
[0223]
s4.计算剩余的imfs:对获得的残差,重复步骤s3,直至获得新残差的极值不超过2个, 停止计算,共获得11个imfs和一个残差;
[0224]
2)通过连续均方误差准则确定噪声主导的imfs与信号主导的imfs分界点k,获得k个 噪声主导的imfs,n-k个信号主导的imfs:
[0225]
通过连续均方误差准则确定分界点k:
[0226]
①
对获得的11个imfs,计算连续均方误差
[0227][0228]
式中:ck(t)和c
k+1
(t)分别为第k个和第k+1个imf,k=1,2,3,...,10;
[0229]
表2 imf的连续均方误差计算结果
[0230][0231][0232]
②
当cmse(imfk,imf
k+1
)仅有一个极小值时,定义分界点k为
[0233][0234]
由表2可知,cmse(imfk,imf
k+1
)有且仅有一个极小值,极小值为0.0411,对应的k=8, 故当cmse(imfk,imf
k+1
)仅有一个极小值时,定义分界点k为8,共获得8个噪声主导的 imfs(imf1~imf8)和3个信号主导的imfs(imf9、imf
10
和imf
11
);
[0235]
3)对获得的8个噪声主导的imfs(imf1~imf8)进行wpt降噪:
[0236]
①
计算噪声主导的imfs的阈值
[0237][0238]
式中:n为噪声主导imfs的采样点数,取4096;thr为噪声主导imfs的阈值;
[0239]
计算可得thr=4.6482;
[0240]
②
以硬阈值函数为噪声主导的imfs的阈值函数
[0241]
硬阈值函数为
[0242][0243]
式中:w为噪声主导imfs分解后的小波包系数;thr为噪声主导imfs的阈值,取4.6482; wh为硬阈值函数;
[0244]
③
通过计算的阈值thr=4.6482与硬阈值函数,采用db系列的db3小波基,对噪声主导 的imfs进行分解和重构,最终获得降噪后的imf
′
s;
[0245]
(5)通过对步骤(4)获得的各分量进行信号重构,获得完全降噪的岩体稳定性声发射监测 信号:
[0246][0247]
式中:c
′
(t)为降噪后的imf
′
s;c(t)为信号主导的imfs;r(t)为保留的残差;s
′
(t)为岩体 破坏完全降噪的声发射监测信号;
[0248]
(6)计算信噪比和均方误差,评价岩体稳定性声发射监测信号的降噪效果;
[0249]
①
计算信噪比
[0250][0251]
式中:ps为信号能量;pn为噪声能量;s
′
(t)为完全降噪的信号;s(t)为原信号;snr为 信噪比;
[0252]
②
计算均方误差
[0253][0254]
式中:s
′
(t)为完全降噪信号;s(t)为原信号;rmse为均方误差;
[0255]
计算的信噪比snr=8.2207,均方误差rmse=0.0717;由此可知,通过ceemdan和wpt 联合降噪方法计算获得的信噪比较大,同时均方误差较小,表明通过ceemdan和wpt联 合降噪方法可以进一步减弱边坡外界环境和采集系统又会引入背景噪声和各种干扰的影响, 获得较为纯净表征边坡变形破坏时产生的声发射信号。
[0256]
以上对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本 领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1